 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTERL: Large-Scale Multi-Target Encirclement Using Transformer-Enhanced Reinforcement Learning
Mar 16, 2025



Pursuit-evasion (PE) problem is a critical challenge in multi-robot systems (MRS). While reinforcement learning (RL) has shown its promise in addressing PE tasks, research has primarily focused on single-target pursuit, with limited exploration of multi-target encirclement, particularly in large-scale settings. This paper proposes a Transformer-Enhanced Reinforcement Learning (TERL) framework for large-scale multi-target encirclement. By integrating a transformer-based policy network with target selection, TERL enables robots to adaptively prioritize targets and safely coordinate robots. Results show that TERL outperforms existing RL-based methods in terms of encirclement success rate and task completion time, while maintaining good performance in large-scale scenarios. Notably, TERL, trained on small-scale scenarios (15 pursuers, 4 targets), generalizes effectively to large-scale settings (80 pursuers, 20 targets) without retraining, achieving a 100% success rate.
iPolicy: Incremental Policy Algorithms for Feedback Motion Planning
Jan 05, 2024This paper presents policy-based motion planning for robotic systems. The motion planning literature has been mostly focused on open-loop trajectory planning which is followed by tracking online. In contrast, we solve the problem of path planning and controller synthesis simultaneously by solving the related feedback control problem. We present a novel incremental policy (iPolicy) algorithm for motion planning, which integrates sampling-based methods and set-valued optimal control methods to compute feedback controllers for the robotic system. In particular, we use sampling to incrementally construct the state space of the system. Asynchronous value iterations are performed on the sampled state space to synthesize the incremental policy feedback controller. We show the convergence of the estimates to the optimal value function in continuous state space. Numerical results with various different dynamical systems (including nonholonomic systems) verify the optimality and effectiveness of iPolicy.
Pareto optimal multi-robot motion planning
Mar 06, 2018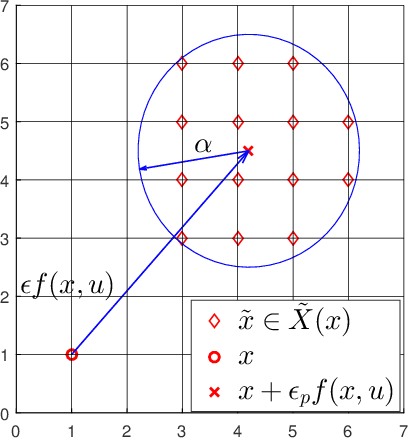
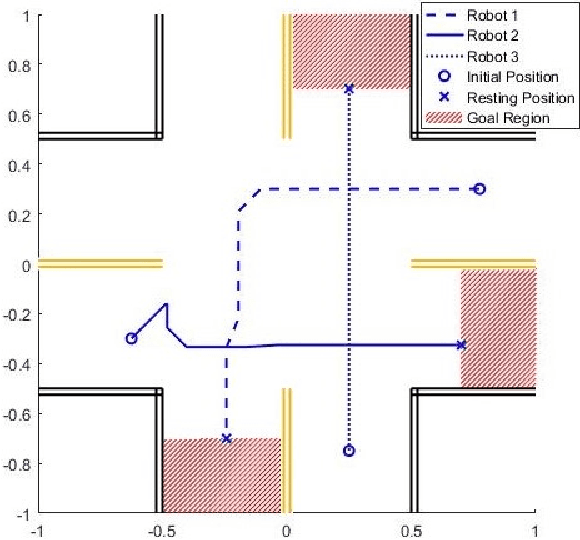
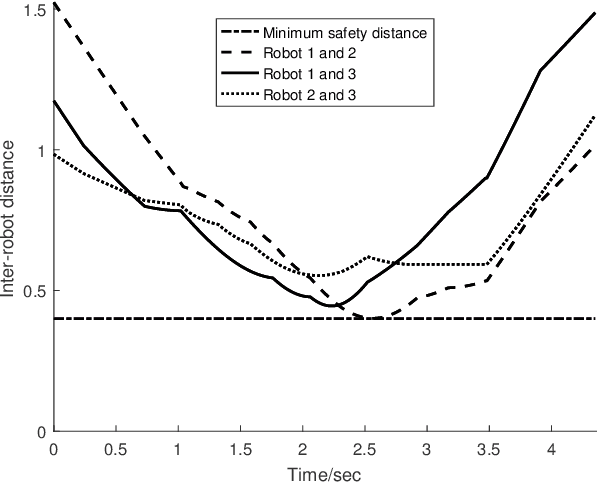
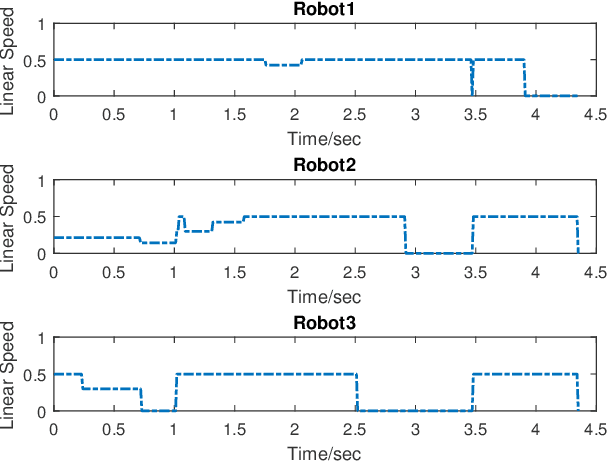
This paper studies a class of multi-robot coordination problems where a team of robots aim to reach their goal regions with minimum time and avoid collisions with obstacles and other robots. A novel numerical algorithm is proposed to identify the Pareto optimal solutions where no robot can unilaterally reduce its traveling time without extending others'. The consistent approximation of the algorithm in the epigraphical profile sense is guaranteed using set-valued numerical analysis. Simulations show the anytime property and increasing optimality of the proposed algorithm.