 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDigital Twins in the Cloud: A Modular, Scalable and Interoperable Framework for Accelerating Verification and Validation of Autonomous Driving Solutions
May 19, 2025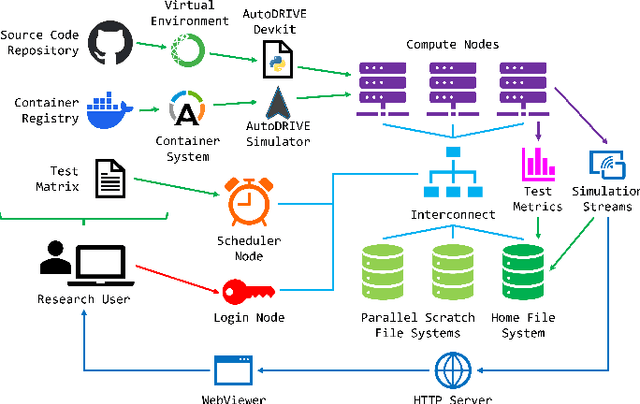
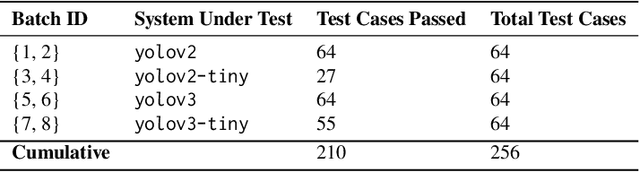
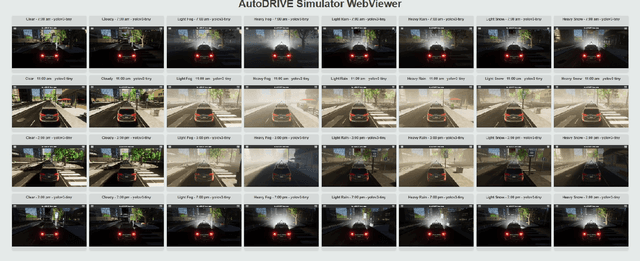
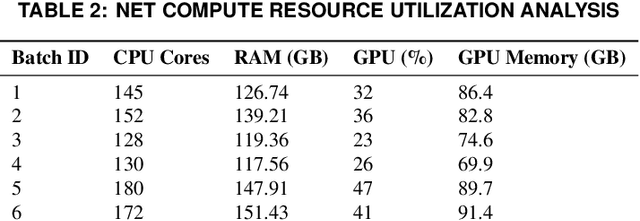
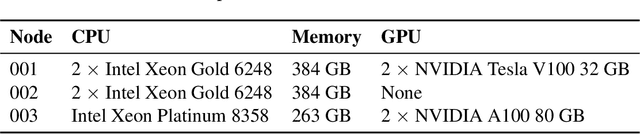
Verification and validation (V&V) of autonomous vehicles (AVs) typically requires exhaustive testing across a variety of operating environments and driving scenarios including rare, extreme, or hazardous situations that might be difficult or impossible to capture in reality. Additionally, physical V&V methods such as track-based evaluations or public-road testing are often constrained by time, cost, and safety, which motivates the need for virtual proving grounds. However, the fidelity and scalability of simulation-based V&V methods can quickly turn into a bottleneck. In such a milieu, this work proposes a virtual proving ground that flexibly scales digital twins within high-performance computing clusters (HPCCs) and automates the V&V process. Here, digital twins enable high-fidelity virtual representation of the AV and its operating environments, allowing extensive scenario-based testing. Meanwhile, HPCC infrastructure brings substantial advantages in terms of computational power and scalability, enabling rapid iterations of simulations, processing and storage of massive amounts of data, and deployment of large-scale test campaigns, thereby reducing the time and cost associated with the V&V process. We demonstrate the efficacy of this approach through a case study that focuses on the variability analysis of a candidate autonomy algorithm to identify potential vulnerabilities in its perception, planning, and control sub-systems. The modularity, scalability, and interoperability of the proposed framework are demonstrated by deploying a test campaign comprising 256 test cases on two different HPCC architectures to ensure continuous operation in a publicly shared resource setting. The findings highlight the ability of the proposed framework to accelerate and streamline the V&V process, thereby significantly compressing (~30x) the timeline.
Characterizing gaussian mixture of motion modes for skid-steer state estimation
Apr 30, 2025Skid-steered wheel mobile robots (SSWMRs) are characterized by the unique domination of the tire-terrain skidding for the robot to move. The lack of reliable friction models cascade into unreliable motion models, especially the reduced ordered variants used for state estimation and robot control. Ensemble modeling is an emerging research direction where the overall motion model is broken down into a family of local models to distribute the performance and resource requirement and provide a fast real-time prediction. To this end, a gaussian mixture model based modeling identification of model clusters is adopted and implemented within an interactive multiple model (IMM) based state estimation. The framework is adopted and implemented for angular velocity as the estimated state for a mid scaled skid-steered wheel mobile robot platform.
A Systematic Digital Engineering Approach to Verification & Validation of Autonomous Ground Vehicles in Off-Road Environments
Mar 18, 2025



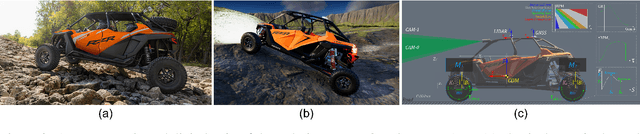
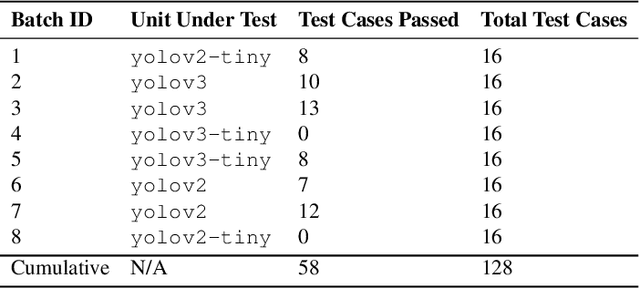
The engineering community currently encounters significant challenges in the systematic development and validation of autonomy algorithms for off-road ground vehicles. These challenges are posed by unusually high test parameters and algorithmic variants. In order to address these pain points, this work presents an optimized digital engineering framework that tightly couples digital twin simulations with model-based systems engineering (MBSE) and model-based design (MBD) workflows. The efficacy of the proposed framework is demonstrated through an end-to-end case study of an autonomous light tactical vehicle (LTV) performing visual servoing to drive along a dirt road and reacting to any obstacles or environmental changes. The presented methodology allows for traceable requirements engineering, efficient variant management, granular parameter sweep setup, systematic test-case definition, and automated execution of the simulations. The candidate off-road autonomy algorithm is evaluated for satisfying requirements against a battery of 128 test cases, which is procedurally generated based on the test parameters (times of the day and weather conditions) and algorithmic variants (perception, planning, and control sub-systems). Finally, the test results and key performance indicators are logged, and the test report is generated automatically. This then allows for manual as well as automated data analysis with traceability and tractability across the digital thread.
Online identification of skidding modes with interactive multiple model estimation
Sep 30, 2024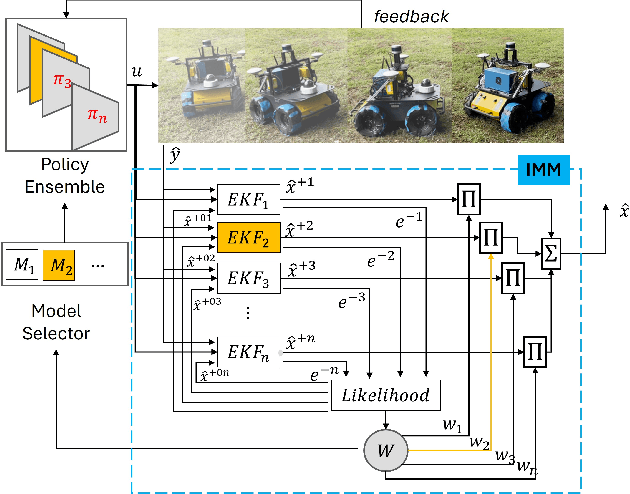
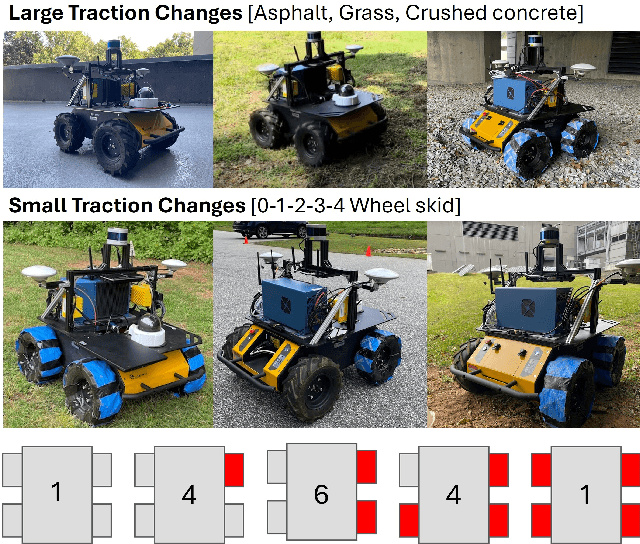
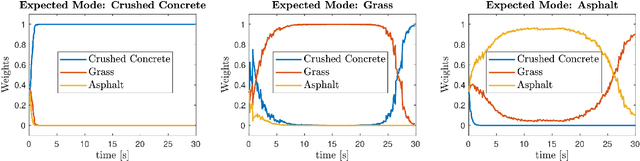
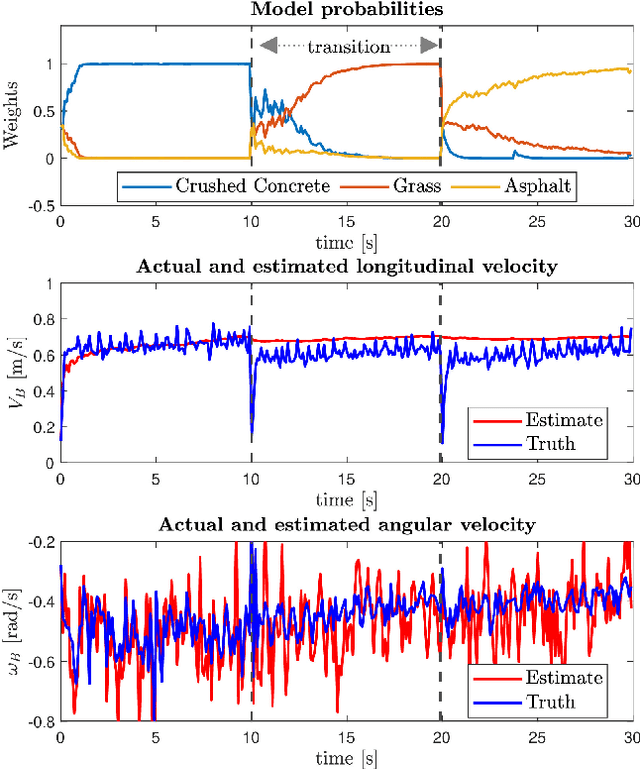
Skid-steered wheel mobile robots (SSWMRs) operate in a variety of outdoor environments exhibiting motion behaviors dominated by the effects of complex wheel-ground interactions. Characterizing these interactions is crucial both from the immediate robot autonomy perspective (for motion prediction and control) as well as a long-term predictive maintenance and diagnostics perspective. An ideal solution entails capturing precise state measurements for decisions and controls, which is considerably difficult, especially in increasingly unstructured outdoor regimes of operations for these robots. In this milieu, a framework to identify pre-determined discrete modes of operation can considerably simplify the motion model identification process. To this end, we propose an interactive multiple model (IMM) based filtering framework to probabilistically identify predefined robot operation modes that could arise due to traversal in different terrains or loss of wheel traction.
Stabilization of vertical motion of a vehicle on bumpy terrain using deep reinforcement learning
Sep 21, 2024Stabilizing vertical dynamics for on-road and off-road vehicles is an important research area that has been looked at mostly from the point of view of ride comfort. The advent of autonomous vehicles now shifts the focus more towards developing stabilizing techniques from the point of view of onboard proprioceptive and exteroceptive sensors whose real-time measurements influence the performance of an autonomous vehicle. The current solutions to this problem of managing the vertical oscillations usually limit themselves to the realm of active suspension systems without much consideration to modulating the vehicle velocity, which plays an important role by the virtue of the fact that vertical and longitudinal dynamics of a ground vehicle are coupled. The task of stabilizing vertical oscillations for military ground vehicles becomes even more challenging due lack of structured environments, like city roads or highways, in off-road scenarios. Moreover, changes in structural parameters of the vehicle, such as mass (due to changes in vehicle loading), suspension stiffness and damping values can have significant effect on the controller's performance. This demands the need for developing deep learning based control policies, that can take into account an extremely large number of input features and approximate a near optimal control action. In this work, these problems are addressed by training a deep reinforcement learning agent to minimize the vertical acceleration of a scaled vehicle travelling over bumps by controlling its velocity.
Digital Twins Meet the Koopman Operator: Data-Driven Learning for Robust Autonomy
Sep 16, 2024



Contrary to on-road autonomous navigation, off-road autonomy is complicated by various factors ranging from sensing challenges to terrain variability. In such a milieu, data-driven approaches have been commonly employed to capture intricate vehicle-environment interactions effectively. However, the success of data-driven methods depends crucially on the quality and quantity of data, which can be compromised by large variability in off-road environments. To address these concerns, we present a novel workflow to recreate the exact vehicle and its target operating conditions digitally for domain-specific data generation. This enables us to effectively model off-road vehicle dynamics from simulation data using the Koopman operator theory, and employ the obtained models for local motion planning and optimal vehicle control. The capabilities of the proposed methodology are demonstrated through an autonomous navigation problem of a 1:5 scale vehicle, where a terrain-informed planner is employed for global mission planning. Results indicate a substantial improvement in off-road navigation performance with the proposed algorithm (5.84x) and underscore the efficacy of digital twinning in terms of improving the sample efficiency (3.2x) and reducing the sim2real gap (5.2%).
Off-Road Autonomy Validation Using Scalable Digital Twin Simulations Within High-Performance Computing Clusters
May 08, 2024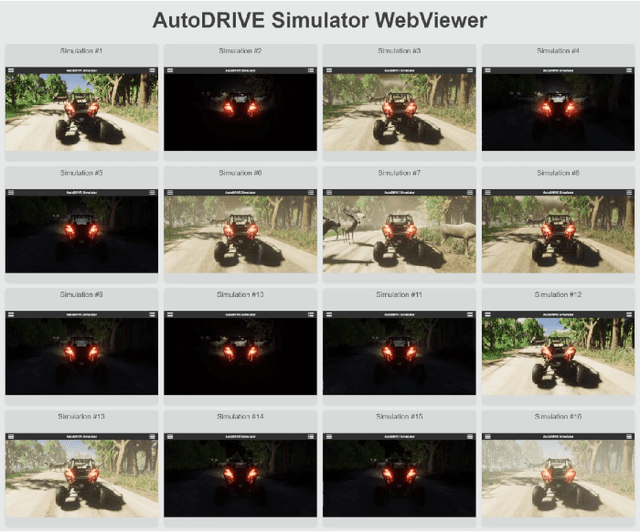
Off-road autonomy validation presents unique challenges due to the unpredictable and dynamic nature of off-road environments. Traditional methods focusing on sequentially sweeping across the parameter space for variability analysis struggle to comprehensively assess the performance and safety of off-road autonomous systems within the imposed time constraints. This paper proposes leveraging scalable digital twin simulations within high-performance computing (HPC) clusters to address this challenge. By harnessing the computational power of HPC clusters, our approach aims to provide a scalable and efficient means to validate off-road autonomy algorithms, enabling rapid iteration and testing of autonomy algorithms under various conditions. We demonstrate the effectiveness of our framework through performance evaluations of the HPC cluster in terms of simulation parallelization and present the systematic variability analysis of a candidate off-road autonomy algorithm to identify potential vulnerabilities in the autonomy stack's perception, planning and control modules.
A Scalable and Parallelizable Digital Twin Framework for Sustainable Sim2Real Transition of Multi-Agent Reinforcement Learning Systems
Mar 16, 2024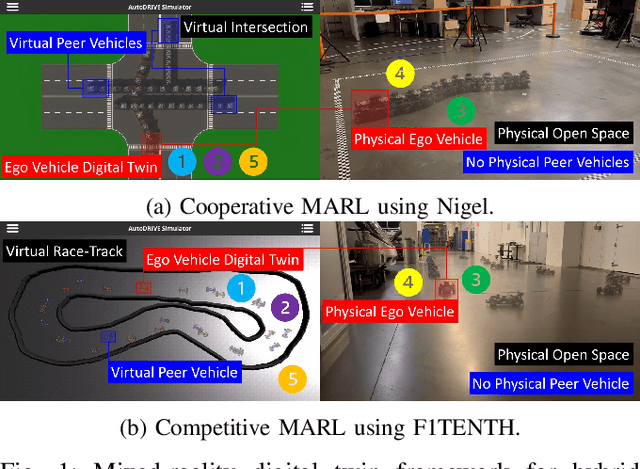

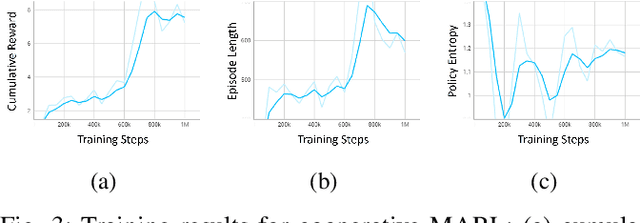
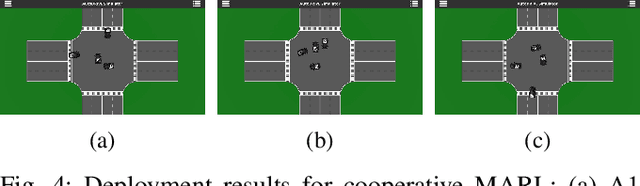
This work presents a sustainable multi-agent deep reinforcement learning framework capable of selectively scaling parallelized training workloads on-demand, and transferring the trained policies from simulation to reality using minimal hardware resources. We introduce AutoDRIVE Ecosystem as an enabling digital twin framework to train, deploy, and transfer cooperative as well as competitive multi-agent reinforcement learning policies from simulation to reality. Particularly, we first investigate an intersection traversal problem of 4 cooperative vehicles (Nigel) that share limited state information in single as well as multi-agent learning settings using a common policy approach. We then investigate an adversarial autonomous racing problem of 2 vehicles (F1TENTH) using an individual policy approach. In either set of experiments, a decentralized learning architecture was adopted, which allowed robust training and testing of the policies in stochastic environments. The agents were provided with realistically sparse observation spaces, and were restricted to sample control actions that implicitly satisfied the imposed kinodynamic and safety constraints. The experimental results for both problem statements are reported in terms of quantitative metrics and qualitative remarks for training as well as deployment phases. We also discuss agent and environment parallelization techniques adopted to efficiently accelerate MARL training, while analyzing their computational performance. Finally, we demonstrate a resource-aware transition of the trained policies from simulation to reality using the proposed digital twin framework.
Multi-Agent Deep Reinforcement Learning for Cooperative and Competitive Autonomous Vehicles using AutoDRIVE Ecosystem
Sep 30, 2023



This work presents a modular and parallelizable multi-agent deep reinforcement learning framework for imbibing cooperative as well as competitive behaviors within autonomous vehicles. We introduce AutoDRIVE Ecosystem as an enabler to develop physically accurate and graphically realistic digital twins of Nigel and F1TENTH, two scaled autonomous vehicle platforms with unique qualities and capabilities, and leverage this ecosystem to train and deploy multi-agent reinforcement learning policies. We first investigate an intersection traversal problem using a set of cooperative vehicles (Nigel) that share limited state information with each other in single as well as multi-agent learning settings using a common policy approach. We then investigate an adversarial head-to-head autonomous racing problem using a different set of vehicles (F1TENTH) in a multi-agent learning setting using an individual policy approach. In either set of experiments, a decentralized learning architecture was adopted, which allowed robust training and testing of the approaches in stochastic environments, since the agents were mutually independent and exhibited asynchronous motion behavior. The problems were further aggravated by providing the agents with sparse observation spaces and requiring them to sample control commands that implicitly satisfied the imposed kinodynamic as well as safety constraints. The experimental results for both problem statements are reported in terms of quantitative metrics and qualitative remarks for training as well as deployment phases.
Towards Sim2Real Transfer of Autonomy Algorithms using AutoDRIVE Ecosystem
Jul 25, 2023


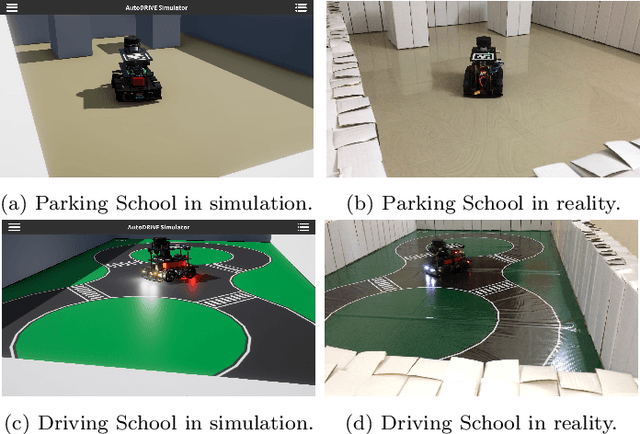
The engineering community currently encounters significant challenges in the development of intelligent transportation algorithms that can be transferred from simulation to reality with minimal effort. This can be achieved by robustifying the algorithms using domain adaptation methods and/or by adopting cutting-edge tools that help support this objective seamlessly. This work presents AutoDRIVE, an openly accessible digital twin ecosystem designed to facilitate synergistic development, simulation and deployment of cyber-physical solutions pertaining to autonomous driving technology; and focuses on bridging the autonomy-oriented simulation-to-reality (sim2real) gap using the proposed ecosystem. In this paper, we extensively explore the modeling and simulation aspects of the ecosystem and substantiate its efficacy by demonstrating the successful transition of two candidate autonomy algorithms from simulation to reality to help support our claims: (i) autonomous parking using probabilistic robotics approach; (ii) behavioral cloning using deep imitation learning. The outcomes of these case studies further strengthen the credibility of AutoDRIVE as an invaluable tool for advancing the state-of-the-art in autonomous driving technology.