 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Systematic Digital Engineering Approach to Verification & Validation of Autonomous Ground Vehicles in Off-Road Environments
Mar 18, 2025



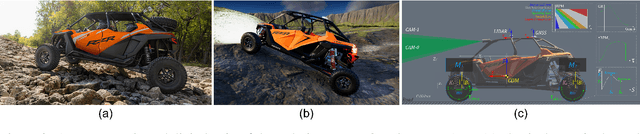
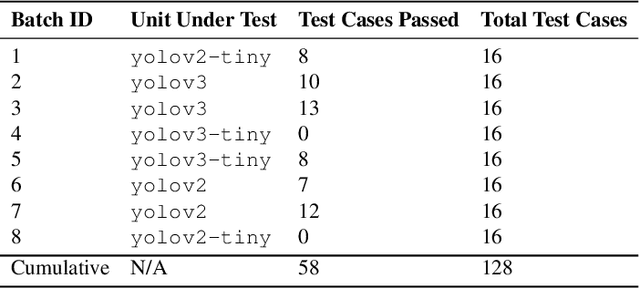
The engineering community currently encounters significant challenges in the systematic development and validation of autonomy algorithms for off-road ground vehicles. These challenges are posed by unusually high test parameters and algorithmic variants. In order to address these pain points, this work presents an optimized digital engineering framework that tightly couples digital twin simulations with model-based systems engineering (MBSE) and model-based design (MBD) workflows. The efficacy of the proposed framework is demonstrated through an end-to-end case study of an autonomous light tactical vehicle (LTV) performing visual servoing to drive along a dirt road and reacting to any obstacles or environmental changes. The presented methodology allows for traceable requirements engineering, efficient variant management, granular parameter sweep setup, systematic test-case definition, and automated execution of the simulations. The candidate off-road autonomy algorithm is evaluated for satisfying requirements against a battery of 128 test cases, which is procedurally generated based on the test parameters (times of the day and weather conditions) and algorithmic variants (perception, planning, and control sub-systems). Finally, the test results and key performance indicators are logged, and the test report is generated automatically. This then allows for manual as well as automated data analysis with traceability and tractability across the digital thread.
Off-Road Autonomy Validation Using Scalable Digital Twin Simulations Within High-Performance Computing Clusters
May 08, 2024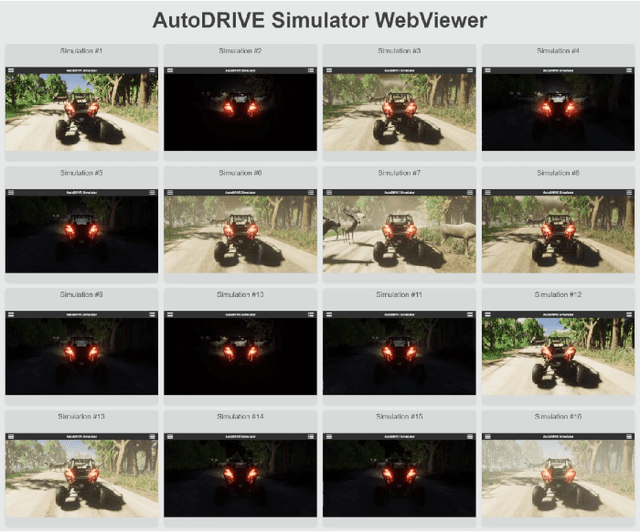
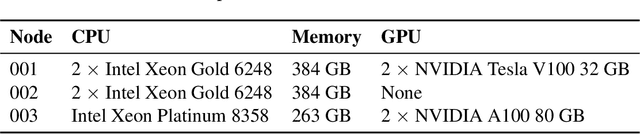
Off-road autonomy validation presents unique challenges due to the unpredictable and dynamic nature of off-road environments. Traditional methods focusing on sequentially sweeping across the parameter space for variability analysis struggle to comprehensively assess the performance and safety of off-road autonomous systems within the imposed time constraints. This paper proposes leveraging scalable digital twin simulations within high-performance computing (HPC) clusters to address this challenge. By harnessing the computational power of HPC clusters, our approach aims to provide a scalable and efficient means to validate off-road autonomy algorithms, enabling rapid iteration and testing of autonomy algorithms under various conditions. We demonstrate the effectiveness of our framework through performance evaluations of the HPC cluster in terms of simulation parallelization and present the systematic variability analysis of a candidate off-road autonomy algorithm to identify potential vulnerabilities in the autonomy stack's perception, planning and control modules.
Using ROC and Unlabeled Data for Increasing Low-Shot Transfer Learning Classification Accuracy
Oct 01, 2020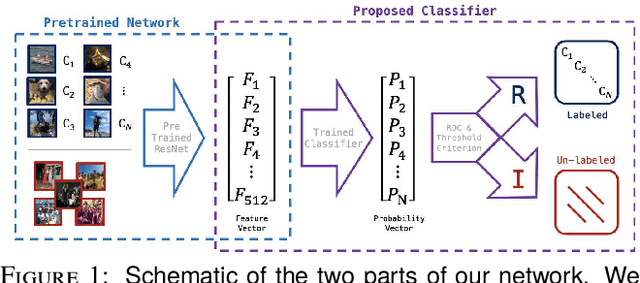
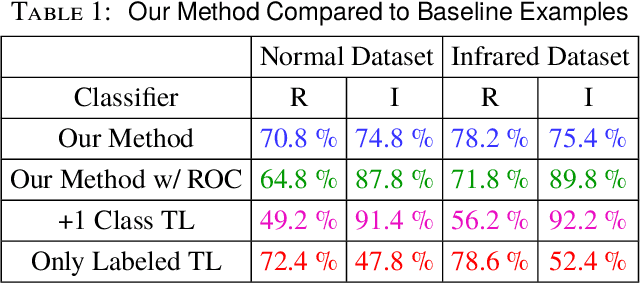
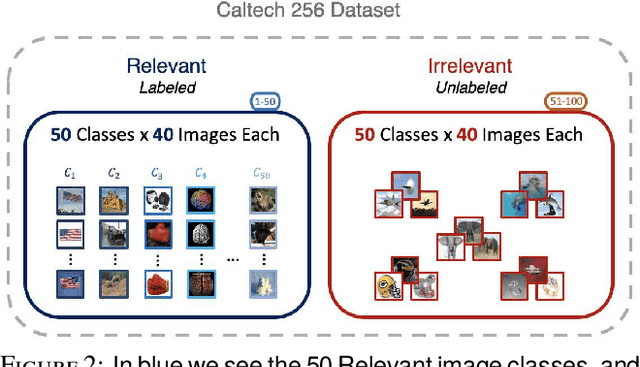
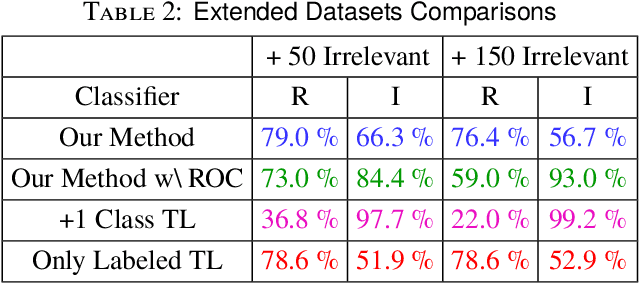
One of the most important characteristics of human visual intelligence is the ability to identify unknown objects. The capability to distinguish between a substance which a human mind has no previous experience of and a familiar object, is innate to every human. In everyday life, within seconds of seeing an "unknown" object, we are able to categorize it as such without any substantial effort. Convolutional Neural Networks, regardless of how they are trained (i.e. in a conventional manner or through transfer learning) can recognize only the classes that they are trained for. When using them for classification, any candidate image will be placed in one of the available classes. We propose a low-shot classifier which can serve as the top layer to any existing CNN that the feature extractor was already trained. Using a limited amount of labeled data for the type of images which need to be specifically classified along with unlabeled data for all other images, a unique target matrix and a Receiver Operator Curve (ROC) criterion, we are able to increase identification accuracy by up to 30% for the images that do not belong to any specific classes, while retaining the ability to identify images that belong to the specific classes of interest.