 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCharacterizing gaussian mixture of motion modes for skid-steer state estimation
Apr 30, 2025Skid-steered wheel mobile robots (SSWMRs) are characterized by the unique domination of the tire-terrain skidding for the robot to move. The lack of reliable friction models cascade into unreliable motion models, especially the reduced ordered variants used for state estimation and robot control. Ensemble modeling is an emerging research direction where the overall motion model is broken down into a family of local models to distribute the performance and resource requirement and provide a fast real-time prediction. To this end, a gaussian mixture model based modeling identification of model clusters is adopted and implemented within an interactive multiple model (IMM) based state estimation. The framework is adopted and implemented for angular velocity as the estimated state for a mid scaled skid-steered wheel mobile robot platform.
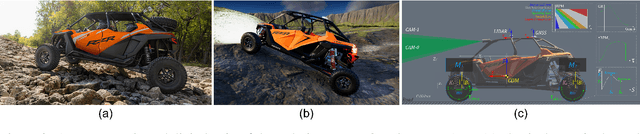
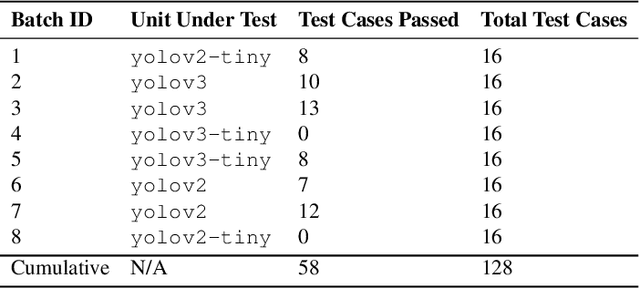
A Systematic Digital Engineering Approach to Verification & Validation of Autonomous Ground Vehicles in Off-Road Environments
Mar 18, 2025



The engineering community currently encounters significant challenges in the systematic development and validation of autonomy algorithms for off-road ground vehicles. These challenges are posed by unusually high test parameters and algorithmic variants. In order to address these pain points, this work presents an optimized digital engineering framework that tightly couples digital twin simulations with model-based systems engineering (MBSE) and model-based design (MBD) workflows. The efficacy of the proposed framework is demonstrated through an end-to-end case study of an autonomous light tactical vehicle (LTV) performing visual servoing to drive along a dirt road and reacting to any obstacles or environmental changes. The presented methodology allows for traceable requirements engineering, efficient variant management, granular parameter sweep setup, systematic test-case definition, and automated execution of the simulations. The candidate off-road autonomy algorithm is evaluated for satisfying requirements against a battery of 128 test cases, which is procedurally generated based on the test parameters (times of the day and weather conditions) and algorithmic variants (perception, planning, and control sub-systems). Finally, the test results and key performance indicators are logged, and the test report is generated automatically. This then allows for manual as well as automated data analysis with traceability and tractability across the digital thread.
Online identification of skidding modes with interactive multiple model estimation
Sep 30, 2024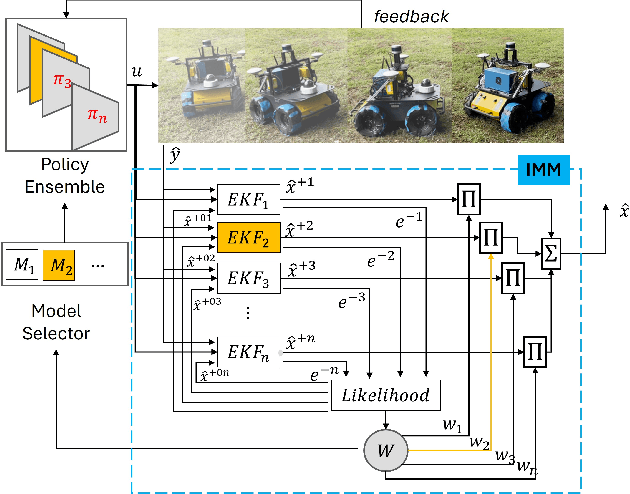
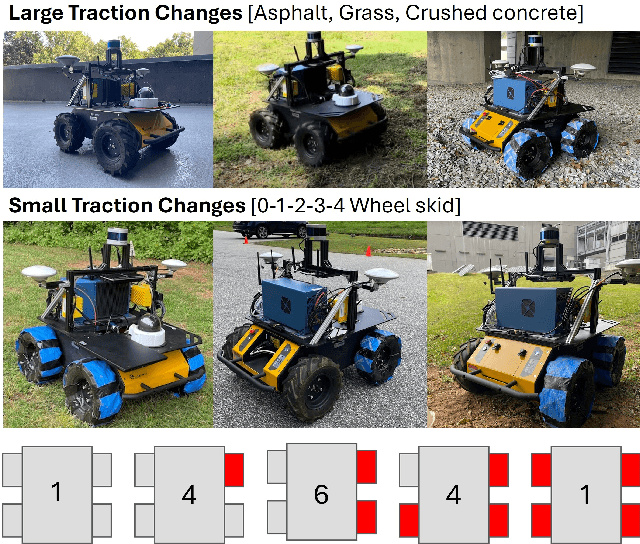
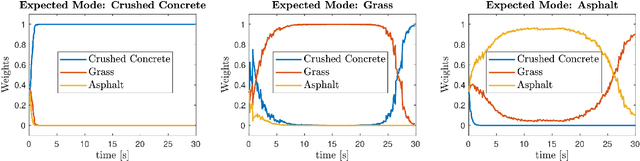
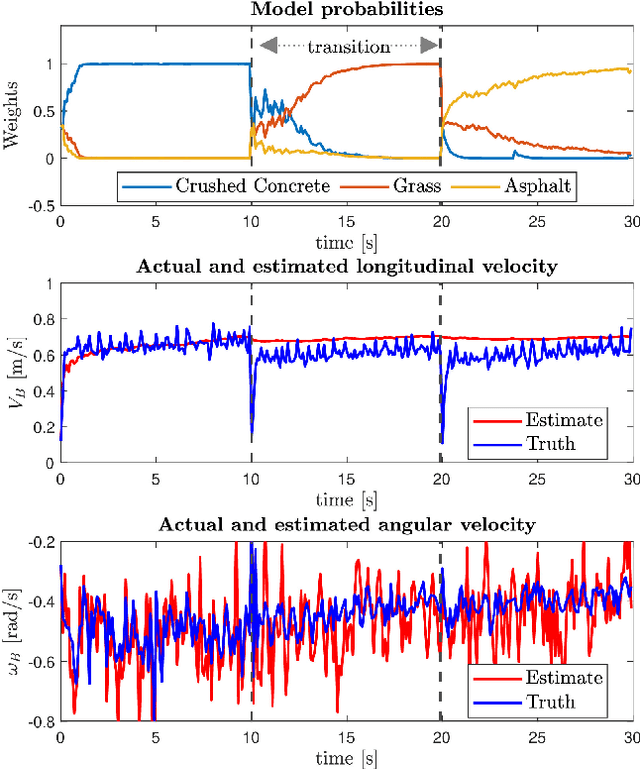
Skid-steered wheel mobile robots (SSWMRs) operate in a variety of outdoor environments exhibiting motion behaviors dominated by the effects of complex wheel-ground interactions. Characterizing these interactions is crucial both from the immediate robot autonomy perspective (for motion prediction and control) as well as a long-term predictive maintenance and diagnostics perspective. An ideal solution entails capturing precise state measurements for decisions and controls, which is considerably difficult, especially in increasingly unstructured outdoor regimes of operations for these robots. In this milieu, a framework to identify pre-determined discrete modes of operation can considerably simplify the motion model identification process. To this end, we propose an interactive multiple model (IMM) based filtering framework to probabilistically identify predefined robot operation modes that could arise due to traversal in different terrains or loss of wheel traction.
Off-Road Autonomy Validation Using Scalable Digital Twin Simulations Within High-Performance Computing Clusters
May 08, 2024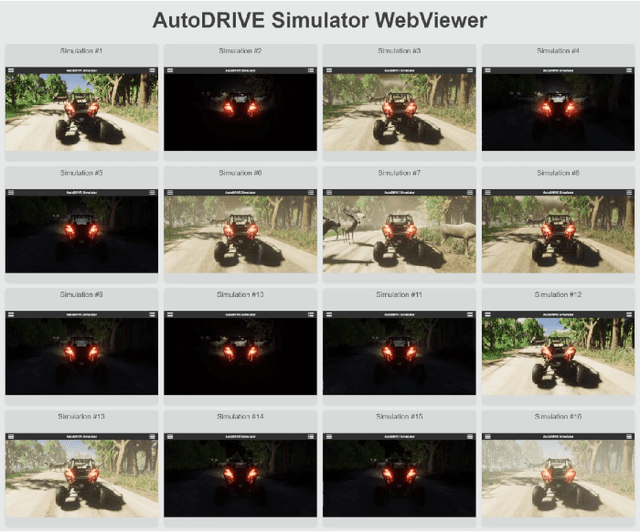
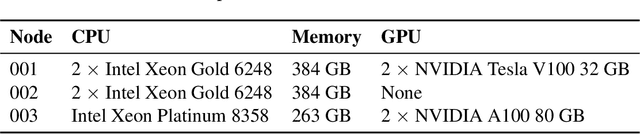
Off-road autonomy validation presents unique challenges due to the unpredictable and dynamic nature of off-road environments. Traditional methods focusing on sequentially sweeping across the parameter space for variability analysis struggle to comprehensively assess the performance and safety of off-road autonomous systems within the imposed time constraints. This paper proposes leveraging scalable digital twin simulations within high-performance computing (HPC) clusters to address this challenge. By harnessing the computational power of HPC clusters, our approach aims to provide a scalable and efficient means to validate off-road autonomy algorithms, enabling rapid iteration and testing of autonomy algorithms under various conditions. We demonstrate the effectiveness of our framework through performance evaluations of the HPC cluster in terms of simulation parallelization and present the systematic variability analysis of a candidate off-road autonomy algorithm to identify potential vulnerabilities in the autonomy stack's perception, planning and control modules.