 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysics-Grounded Multi-Agent Architecture for Traceable, Risk-Aware Human-AI Decision Support in Manufacturing
May 05, 2026High-precision CNC machining of free-form aerospace components requires bounded compensations informed by inspection, simulation, and process knowledge. Off-the-shelf large language model (LLM) assistants can generate text, but they do not reliably execute risk-constrained multi-step numerical workflows or provide auditable provenance for high-stakes decisions. We present multi-agent knowledge analysis (MAKA), a human-in-the-loop decision-support architecture that separates intent routing, tools-only quantitative analysis, knowledge graph retrieval, and critic-based verification that enforces physical plausibility, safety bounds, and provenance completeness before recommendations are surfaced for human approval. MAKA is instantiated on a Ti-6Al-4V rotor blade machining testbed by fusing virtual-machining path-tracking error fields, cutting-force and deflection simulations, and scan-based 3D inspection deviation maps from 16 blades. The analysis decomposes deviation into an evidence-linked pathing component, a drift-based wear proxy capturing systematic evolution across parts, a residual systematic compliance term, and a variability proxy for instability-aware escalation. In a three-level tool-orchestration benchmark (single-step through $\geq$3-step stateful sequences), MAKA improves successful tool execution by up to 87.5 percentage points relative to an unstructured single-model interaction pattern with identical tool access. Digital twin what-if studies show MAKA can coordinate traceable compensation candidates that reduce predicted surface deviation from order $10^{-2}$in to approximately $\pm 10^{-3}$in over most of the blade within the simulation environment, providing a pre-deployment verification signal for risk-aware human decision-making.
Task-Aware Scanning Parameter Configuration for Robotic Inspection Using Vision Language Embeddings and Hyperdimensional Computing
May 05, 2026Robotic laser profiling is widely used for dimensional verification and surface inspection, yet measurement fidelity is often dominated by sensor configuration rather than robot motion. Industrial profilers expose multiple coupled parameters, including sampling frequency, measurement range, exposure time, receiver dynamic range, and illumination, that are still tuned by trial-and-error; mismatches can cause saturation, clipping, or missing returns that cannot be recovered downstream. We formulate instruction-conditioned sensing parameter recommendation; given a pre-scan RGB observation and a natural-language inspection instruction, infer a discrete configuration over key parameters of a robot-mounted profiler. To benchmark this problem, we develop Instruct-Obs2Param, a real-world multimodal dataset linking inspection intents and multi-view pose and illumination variation across 16 objects to canonical parameter regimes. We then propose ScanHD, a hyperdimensional computing framework that binds instruction and observation into a task-aware code and performs parameter-wise associative reasoning with compact memories, matching discrete scanner regimes while yielding stable, interpretable, low-latency decisions. On Instruct-Obs2Param, ScanHD achieves 92.7% average exact accuracy and 98.1% average Win@1 accuracy across the five parameters, with strong cross-split generalization and low-latency inference suitable for deployment, outperforming rule-based heuristics, conventional multimodal models, and multimodal large language models. This work enables autonomous, instruction-conditioned sensing configuration from task intent and scene context, eliminating manual tuning and elevating sensor configuration from a static setting to an adaptive decision variable.
SRMU: Relevance-Gated Updates for Streaming Hyperdimensional Memories
Apr 16, 2026Sequential associative memories (SAMs) are difficult to build and maintain in real-world streaming environments, where observations arrive incrementally over time, have imbalanced sampling, and non-stationary temporal dynamics. Vector Symbolic Architectures (VSAs) provide a biologically-inspired framework for building SAMs. Entities and attributes are encoded as quasi-orthogonal hyperdimensional vectors and processed with well defined algebraic operations. Despite this rich framework, most VSA systems rely on simple additive updates, where repeated observations reinforce existing information even when no new information is introduced. In non-stationary environments, this leads to the persistence of stale information after the underlying system changes. In this work, we introduce the Sequential Relevance Memory Unit (SRMU), a domain- and cleanup-agnostic update rule for VSA-based SAMs. The SRMU combines temporal decay with a relevance gating mechanism. Unlike prior approaches that solely rely on cleanup, the SRMU regulates memory formation by filtering redundant, conflicting, and stale information before storage. We evaluate the SRMU on streaming state-tracking tasks that isolate non-uniform sampling and non-stationary temporal dynamics. Our results show that the SRMU increases memory similarity by $12.6\%$ and reduces cumulative memory magnitude by $53.5\%$. This shows that the SRMU produces more stable memory growth and stronger alignment with the ground-truth state.
HyperSpace: A Generalized Framework for Spatial Encoding in Hyperdimensional Representations
Apr 16, 2026Vector Symbolic Architectures (VSAs) provide a well-defined algebraic framework for compositional representations in hyperdimensional spaces. We introduce HyperSpace, an open-source framework that decomposes VSA systems into modular operators for encoding, binding, bundling, similarity, cleanup, and regression. Using HyperSpace, we analyze and benchmark two representative VSA backends: Holographic Reduced Representations (HRR) and Fourier Holographic Reduced Representations (FHRR). Although FHRR provides lower theoretical complexity for individual operations, HyperSpaces modularity reveals that similarity and cleanup dominate runtime in spatial domains. As a result, HRR and FHRR exhibit comparable end-to-end performance. Differences in memory footprint introduce additional deployment trade-offs where HRR requires approximately half the memory of FHRR vectors. By enabling modular, system-level evaluation, HyperSpace reveals practical trade-offs in VSA pipelines that are not apparent from theoretical or operator-level comparisons alone.
Knowledge Graph Fusion with Large Language Models for Accurate, Explainable Manufacturing Process Planning
Jun 16, 2025Precision process planning in Computer Numerical Control (CNC) machining demands rapid, context-aware decisions on tool selection, feed-speed pairs, and multi-axis routing, placing immense cognitive and procedural burdens on engineers from design specification through final part inspection. Conventional rule-based computer-aided process planning and knowledge-engineering shells freeze domain know-how into static tables, which become limited when dealing with unseen topologies, novel material states, shifting cost-quality-sustainability weightings, or shop-floor constraints such as tool unavailability and energy caps. Large language models (LLMs) promise flexible, instruction-driven reasoning for tasks but they routinely hallucinate numeric values and provide no provenance. We present Augmented Retrieval Knowledge Network Enhanced Search & Synthesis (ARKNESS), the end-to-end framework that fuses zero-shot Knowledge Graph (KG) construction with retrieval-augmented generation to deliver verifiable, numerically exact answers for CNC process planning. ARKNESS (1) automatically distills heterogeneous machining documents, G-code annotations, and vendor datasheets into augmented triple, multi-relational graphs without manual labeling, and (2) couples any on-prem LLM with a retriever that injects the minimal, evidence-linked subgraph needed to answer a query. Benchmarked on 155 industry-curated questions spanning tool sizing and feed-speed optimization, a lightweight 3B-parameter Llama-3 augmented by ARKNESS matches GPT-4o accuracy while achieving a +25 percentage point gain in multiple-choice accuracy, +22.4 pp in F1, and 8.1x ROUGE-L on open-ended responses.
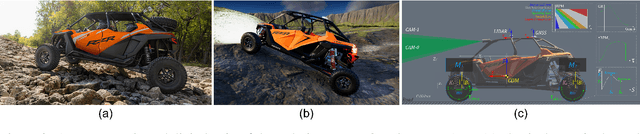
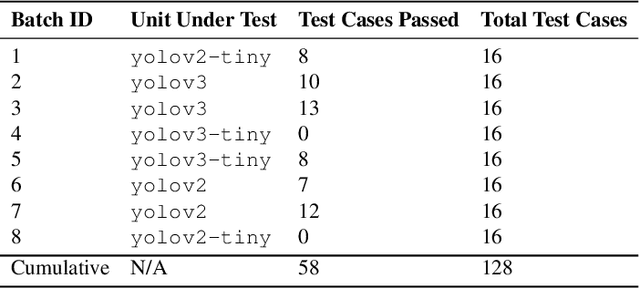
A Systematic Digital Engineering Approach to Verification & Validation of Autonomous Ground Vehicles in Off-Road Environments
Mar 18, 2025



The engineering community currently encounters significant challenges in the systematic development and validation of autonomy algorithms for off-road ground vehicles. These challenges are posed by unusually high test parameters and algorithmic variants. In order to address these pain points, this work presents an optimized digital engineering framework that tightly couples digital twin simulations with model-based systems engineering (MBSE) and model-based design (MBD) workflows. The efficacy of the proposed framework is demonstrated through an end-to-end case study of an autonomous light tactical vehicle (LTV) performing visual servoing to drive along a dirt road and reacting to any obstacles or environmental changes. The presented methodology allows for traceable requirements engineering, efficient variant management, granular parameter sweep setup, systematic test-case definition, and automated execution of the simulations. The candidate off-road autonomy algorithm is evaluated for satisfying requirements against a battery of 128 test cases, which is procedurally generated based on the test parameters (times of the day and weather conditions) and algorithmic variants (perception, planning, and control sub-systems). Finally, the test results and key performance indicators are logged, and the test report is generated automatically. This then allows for manual as well as automated data analysis with traceability and tractability across the digital thread.
Generalizable Reinforcement Learning with Biologically Inspired Hyperdimensional Occupancy Grid Maps for Exploration and Goal-Directed Path Planning
Feb 13, 2025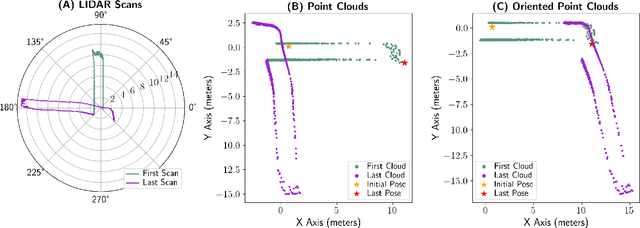
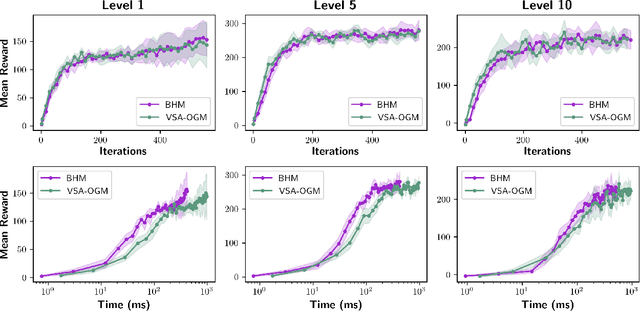
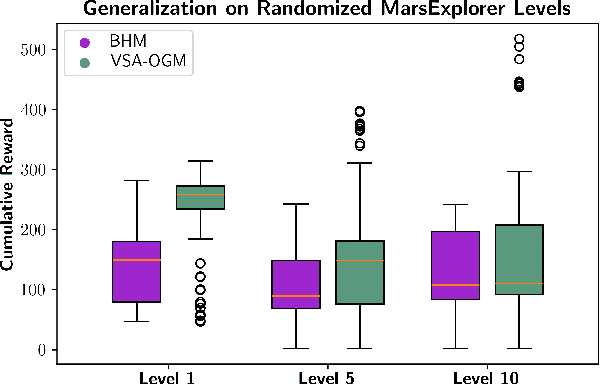
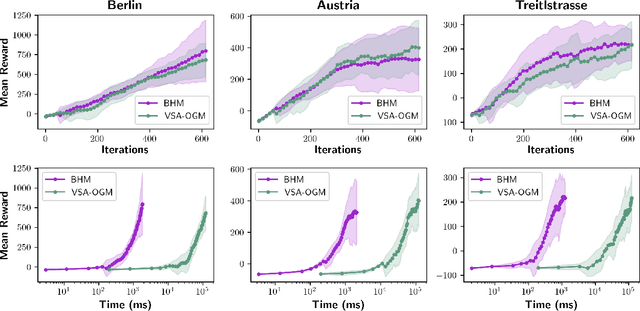
Real-time autonomous systems utilize multi-layer computational frameworks to perform critical tasks such as perception, goal finding, and path planning. Traditional methods implement perception using occupancy grid mapping (OGM), segmenting the environment into discretized cells with probabilistic information. This classical approach is well-established and provides a structured input for downstream processes like goal finding and path planning algorithms. Recent approaches leverage a biologically inspired mathematical framework known as vector symbolic architectures (VSA), commonly known as hyperdimensional computing, to perform probabilistic OGM in hyperdimensional space. This approach, VSA-OGM, provides native compatibility with spiking neural networks, positioning VSA-OGM as a potential neuromorphic alternative to conventional OGM. However, for large-scale integration, it is essential to assess the performance implications of VSA-OGM on downstream tasks compared to established OGM methods. This study examines the efficacy of VSA-OGM against a traditional OGM approach, Bayesian Hilbert Maps (BHM), within reinforcement learning based goal finding and path planning frameworks, across a controlled exploration environment and an autonomous driving scenario inspired by the F1-Tenth challenge. Our results demonstrate that VSA-OGM maintains comparable learning performance across single and multi-scenario training configurations while improving performance on unseen environments by approximately 47%. These findings highlight the increased generalizability of policy networks trained with VSA-OGM over BHM, reinforcing its potential for real-world deployment in diverse environments.
Online identification of skidding modes with interactive multiple model estimation
Sep 30, 2024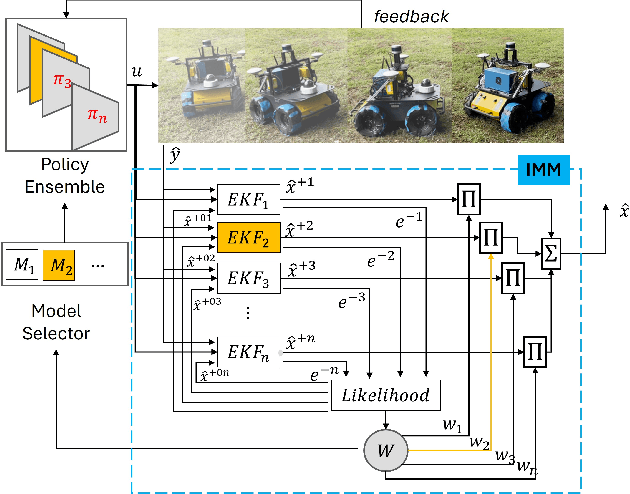
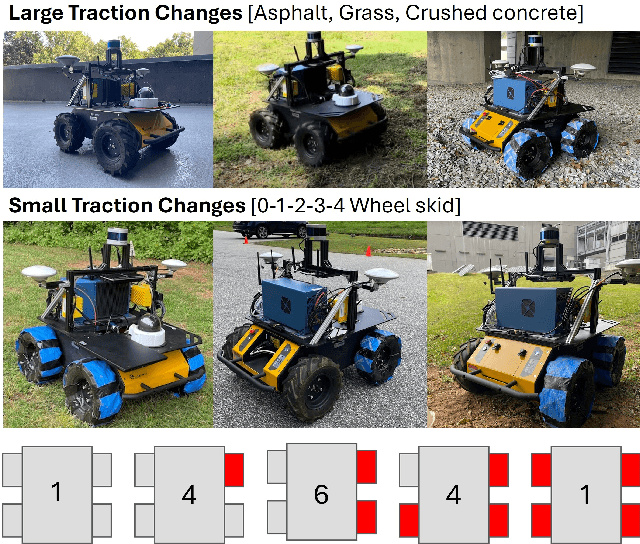
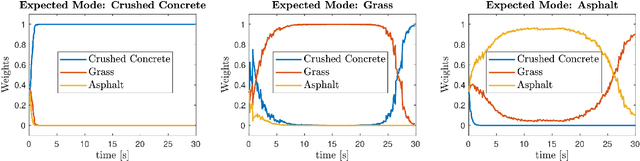
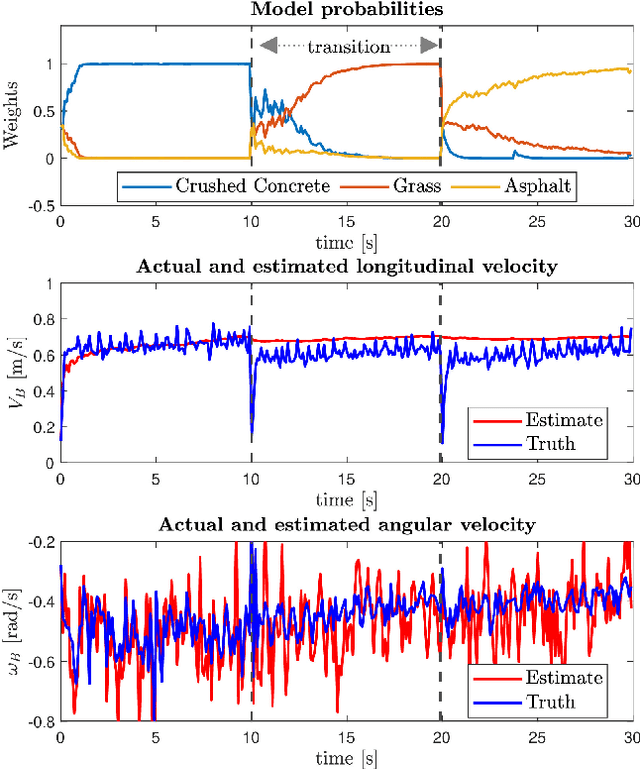
Skid-steered wheel mobile robots (SSWMRs) operate in a variety of outdoor environments exhibiting motion behaviors dominated by the effects of complex wheel-ground interactions. Characterizing these interactions is crucial both from the immediate robot autonomy perspective (for motion prediction and control) as well as a long-term predictive maintenance and diagnostics perspective. An ideal solution entails capturing precise state measurements for decisions and controls, which is considerably difficult, especially in increasingly unstructured outdoor regimes of operations for these robots. In this milieu, a framework to identify pre-determined discrete modes of operation can considerably simplify the motion model identification process. To this end, we propose an interactive multiple model (IMM) based filtering framework to probabilistically identify predefined robot operation modes that could arise due to traversal in different terrains or loss of wheel traction.
Brain Inspired Probabilistic Occupancy Grid Mapping with Hyperdimensional Computing
Aug 17, 2024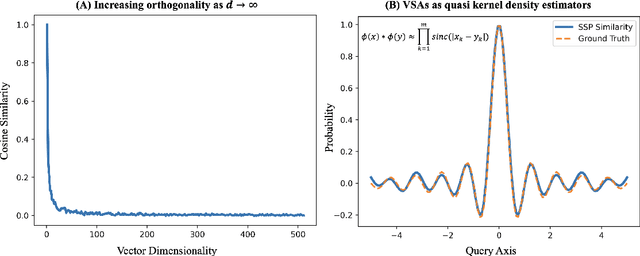
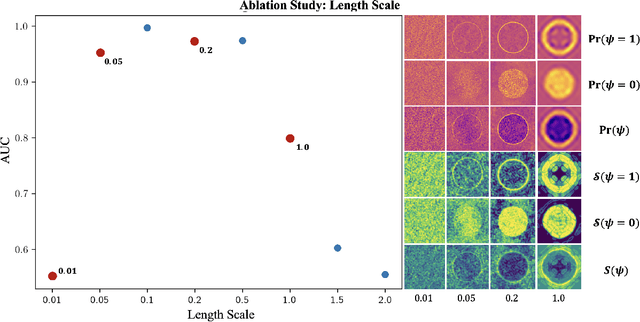

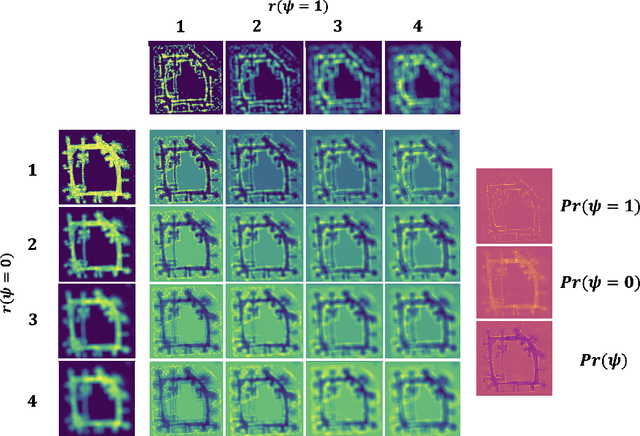
Real-time robotic systems require advanced perception, computation, and action capability. However, the main bottleneck in current autonomous systems is the trade-off between computational capability, energy efficiency and model determinism. World modeling, a key objective of many robotic systems, commonly uses occupancy grid mapping (OGM) as the first step towards building an end-to-end robotic system with perception, planning, autonomous maneuvering, and decision making capabilities. OGM divides the environment into discrete cells and assigns probability values to attributes such as occupancy and traversability. Existing methods fall into two categories: traditional methods and neural methods. Traditional methods rely on dense statistical calculations, while neural methods employ deep learning for probabilistic information processing. Recent works formulate a deterministic theory of neural computation at the intersection of cognitive science and vector symbolic architectures. In this study, we propose a Fourier-based hyperdimensional OGM system, VSA-OGM, combined with a novel application of Shannon entropy that retains the interpretability and stability of traditional methods along with the improved computational efficiency of neural methods. Our approach, validated across multiple datasets, achieves similar accuracy to covariant traditional methods while approximately reducing latency by 200x and memory by 1000x. Compared to invariant traditional methods, we see similar accuracy values while reducing latency by 3.7x. Moreover, we achieve 1.5x latency reductions compared to neural methods while eliminating the need for domain-specific model training.
Off-Road Autonomy Validation Using Scalable Digital Twin Simulations Within High-Performance Computing Clusters
May 08, 2024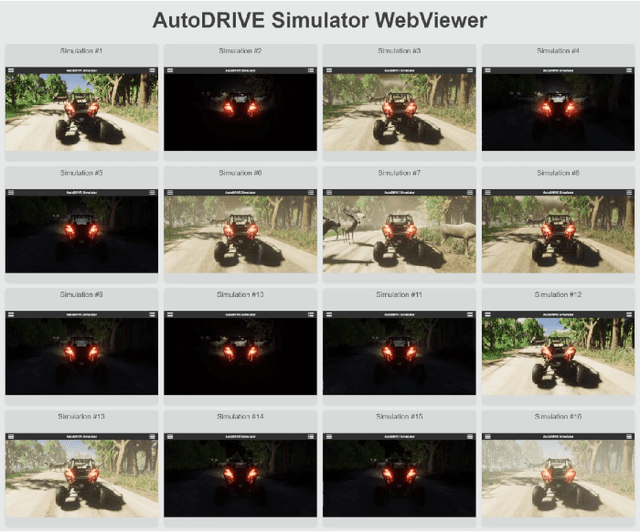
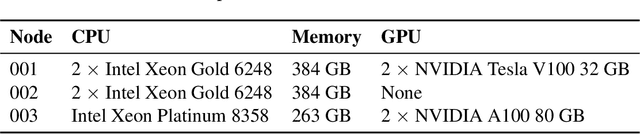
Off-road autonomy validation presents unique challenges due to the unpredictable and dynamic nature of off-road environments. Traditional methods focusing on sequentially sweeping across the parameter space for variability analysis struggle to comprehensively assess the performance and safety of off-road autonomous systems within the imposed time constraints. This paper proposes leveraging scalable digital twin simulations within high-performance computing (HPC) clusters to address this challenge. By harnessing the computational power of HPC clusters, our approach aims to provide a scalable and efficient means to validate off-road autonomy algorithms, enabling rapid iteration and testing of autonomy algorithms under various conditions. We demonstrate the effectiveness of our framework through performance evaluations of the HPC cluster in terms of simulation parallelization and present the systematic variability analysis of a candidate off-road autonomy algorithm to identify potential vulnerabilities in the autonomy stack's perception, planning and control modules.