 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHyperSpace: A Generalized Framework for Spatial Encoding in Hyperdimensional Representations
Apr 16, 2026Vector Symbolic Architectures (VSAs) provide a well-defined algebraic framework for compositional representations in hyperdimensional spaces. We introduce HyperSpace, an open-source framework that decomposes VSA systems into modular operators for encoding, binding, bundling, similarity, cleanup, and regression. Using HyperSpace, we analyze and benchmark two representative VSA backends: Holographic Reduced Representations (HRR) and Fourier Holographic Reduced Representations (FHRR). Although FHRR provides lower theoretical complexity for individual operations, HyperSpaces modularity reveals that similarity and cleanup dominate runtime in spatial domains. As a result, HRR and FHRR exhibit comparable end-to-end performance. Differences in memory footprint introduce additional deployment trade-offs where HRR requires approximately half the memory of FHRR vectors. By enabling modular, system-level evaluation, HyperSpace reveals practical trade-offs in VSA pipelines that are not apparent from theoretical or operator-level comparisons alone.
SRMU: Relevance-Gated Updates for Streaming Hyperdimensional Memories
Apr 16, 2026Sequential associative memories (SAMs) are difficult to build and maintain in real-world streaming environments, where observations arrive incrementally over time, have imbalanced sampling, and non-stationary temporal dynamics. Vector Symbolic Architectures (VSAs) provide a biologically-inspired framework for building SAMs. Entities and attributes are encoded as quasi-orthogonal hyperdimensional vectors and processed with well defined algebraic operations. Despite this rich framework, most VSA systems rely on simple additive updates, where repeated observations reinforce existing information even when no new information is introduced. In non-stationary environments, this leads to the persistence of stale information after the underlying system changes. In this work, we introduce the Sequential Relevance Memory Unit (SRMU), a domain- and cleanup-agnostic update rule for VSA-based SAMs. The SRMU combines temporal decay with a relevance gating mechanism. Unlike prior approaches that solely rely on cleanup, the SRMU regulates memory formation by filtering redundant, conflicting, and stale information before storage. We evaluate the SRMU on streaming state-tracking tasks that isolate non-uniform sampling and non-stationary temporal dynamics. Our results show that the SRMU increases memory similarity by $12.6\%$ and reduces cumulative memory magnitude by $53.5\%$. This shows that the SRMU produces more stable memory growth and stronger alignment with the ground-truth state.
ConformalHDC: Uncertainty-Aware Hyperdimensional Computing with Application to Neural Decoding
Feb 24, 2026Hyperdimensional Computing (HDC) offers a computationally efficient paradigm for neuromorphic learning. Yet, it lacks rigorous uncertainty quantification, leading to open decision boundaries and, consequently, vulnerability to outliers, adversarial perturbations, and out-of-distribution inputs. To address these limitations, we introduce ConformalHDC, a unified framework that combines the statistical guarantees of conformal prediction with the computational efficiency of HDC. For this framework, we propose two complementary variations. First, the set-valued formulation provides finite-sample, distribution-free coverage guarantees. Using carefully designed conformity scores, it forms enclosed decision boundaries that improve robustness to non-conforming inputs. Second, the point-valued formulation leverages the same conformity scores to produce a single prediction when desired, potentially improving accuracy over traditional HDC by accounting for class interactions. We demonstrate the broad applicability of the proposed framework through evaluations on multiple real-world datasets. In particular, we apply our method to the challenging problem of decoding non-spatial stimulus information from the spiking activity of hippocampal neurons recorded as subjects performed a sequence memory task. Our results show that ConformalHDC not only accurately decodes the stimulus information represented in the neural activity data, but also provides rigorous uncertainty estimates and correctly abstains when presented with data from other behavioral states. Overall, these capabilities position the framework as a reliable, uncertainty-aware foundation for neuromorphic computing.
Izhikevich-Inspired Temporal Dynamics for Enhancing Privacy, Efficiency, and Transferability in Spiking Neural Networks
May 07, 2025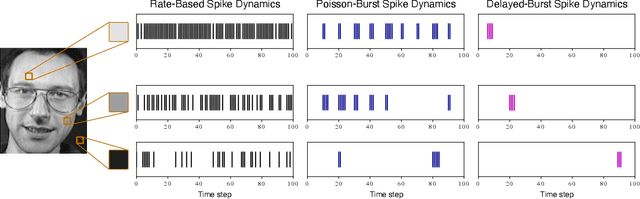
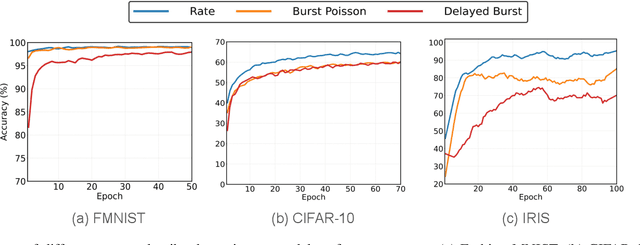
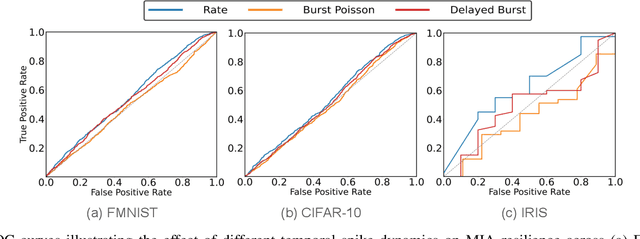
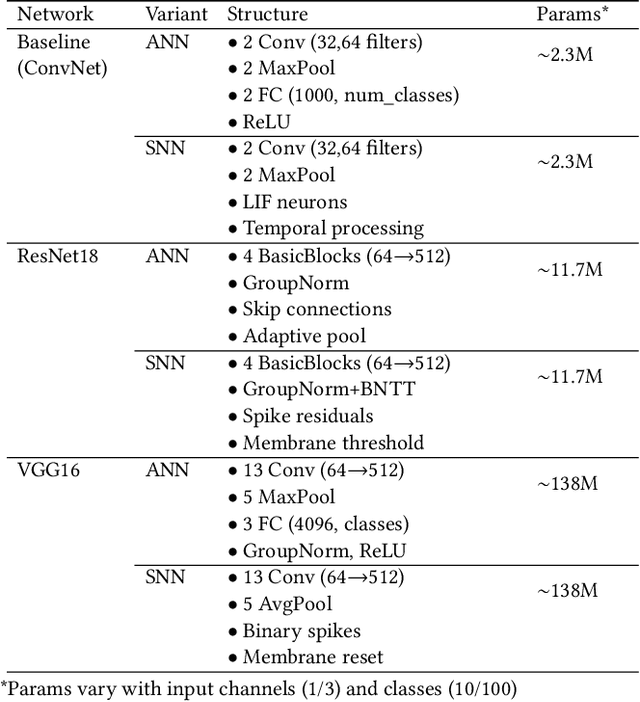
Biological neurons exhibit diverse temporal spike patterns, which are believed to support efficient, robust, and adaptive neural information processing. While models such as Izhikevich can replicate a wide range of these firing dynamics, their complexity poses challenges for directly integrating them into scalable spiking neural networks (SNN) training pipelines. In this work, we propose two probabilistically driven, input-level temporal spike transformations: Poisson-Burst and Delayed-Burst that introduce biologically inspired temporal variability directly into standard Leaky Integrate-and-Fire (LIF) neurons. This enables scalable training and systematic evaluation of how spike timing dynamics affect privacy, generalization, and learning performance. Poisson-Burst modulates burst occurrence based on input intensity, while Delayed-Burst encodes input strength through burst onset timing. Through extensive experiments across multiple benchmarks, we demonstrate that Poisson-Burst maintains competitive accuracy and lower resource overhead while exhibiting enhanced privacy robustness against membership inference attacks, whereas Delayed-Burst provides stronger privacy protection at a modest accuracy trade-off. These findings highlight the potential of biologically grounded temporal spike dynamics in improving the privacy, generalization and biological plausibility of neuromorphic learning systems.
A Retina-Inspired Pathway to Real-Time Motion Prediction inside Image Sensors for Extreme-Edge Intelligence
Apr 02, 2025The ability to predict motion in real time is fundamental to many maneuvering activities in animals, particularly those critical for survival, such as attack and escape responses. Given its significance, it is no surprise that motion prediction in animals begins in the retina. Similarly, autonomous systems utilizing computer vision could greatly benefit from the capability to predict motion in real time. Therefore, for computer vision applications, motion prediction should be integrated directly at the camera pixel level. Towards that end, we present a retina-inspired neuromorphic framework capable of performing real-time, energy-efficient MP directly within camera pixels. Our hardware-algorithm framework, implemented using GlobalFoundries 22nm FDSOI technology, integrates key retinal MP compute blocks, including a biphasic filter, spike adder, nonlinear circuit, and a 2D array for multi-directional motion prediction. Additionally, integrating the sensor and MP compute die using a 3D Cu-Cu hybrid bonding approach improves design compactness by minimizing area usage and simplifying routing complexity. Validated on real-world object stimuli, the model delivers efficient, low-latency MP for decision-making scenarios reliant on predictive visual computation, while consuming only 18.56 pJ/MP in our mixed-signal hardware implementation.
On the Privacy-Preserving Properties of Spiking Neural Networks with Unique Surrogate Gradients and Quantization Levels
Feb 25, 2025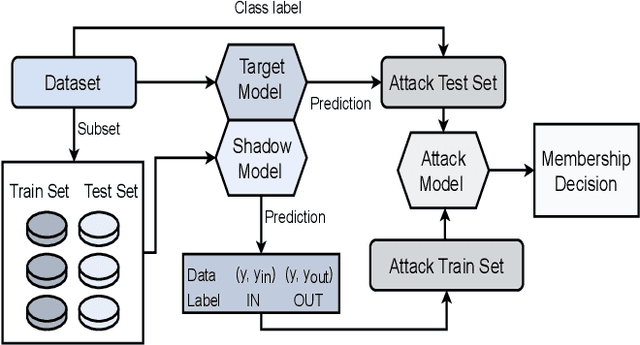
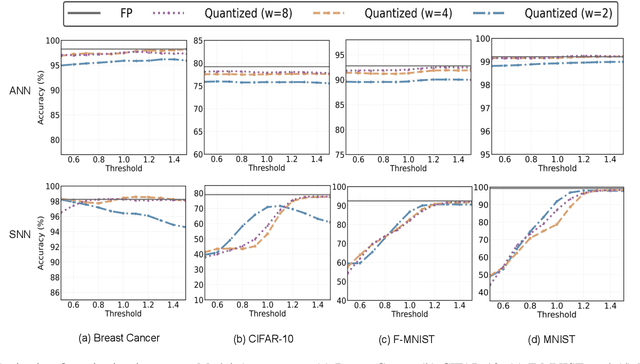
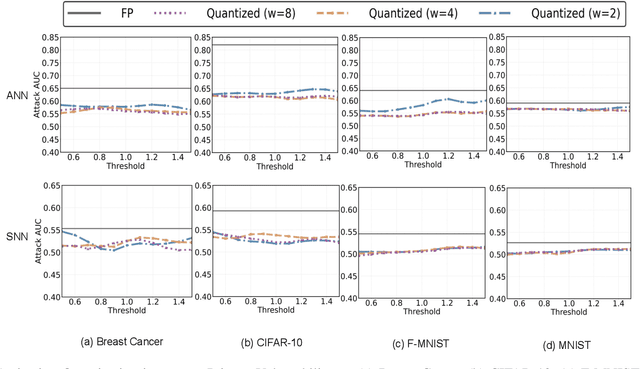
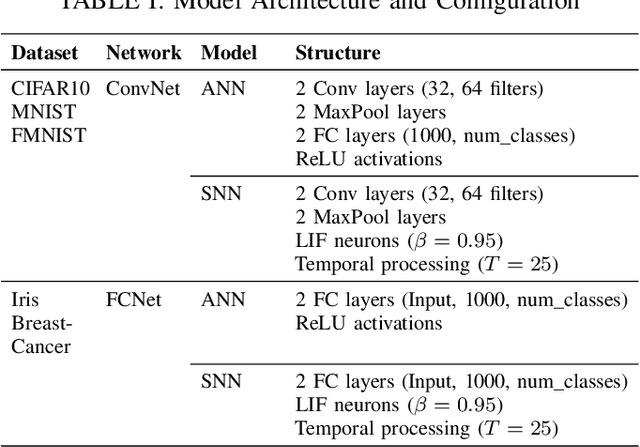
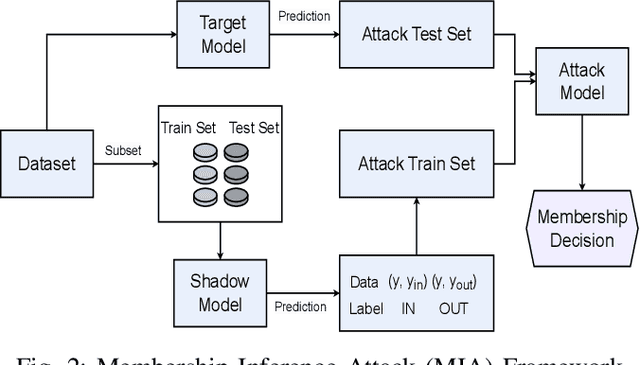
As machine learning models increasingly process sensitive data, understanding their vulnerability to privacy attacks is vital. Membership inference attacks (MIAs) exploit model responses to infer whether specific data points were used during training, posing a significant privacy risk. Prior research suggests that spiking neural networks (SNNs), which rely on event-driven computation and discrete spike-based encoding, exhibit greater resilience to MIAs than artificial neural networks (ANNs). This resilience stems from their non-differentiable activations and inherent stochasticity, which obscure the correlation between model responses and individual training samples. To enhance privacy in SNNs, we explore two techniques: quantization and surrogate gradients. Quantization, which reduces precision to limit information leakage, has improved privacy in ANNs. Given SNNs' sparse and irregular activations, quantization may further disrupt the activation patterns exploited by MIAs. We assess the vulnerability of SNNs and ANNs under weight and activation quantization across multiple datasets, using the attack model's receiver operating characteristic (ROC) curve area under the curve (AUC) metric, where lower values indicate stronger privacy, and evaluate the privacy-accuracy trade-off. Our findings show that quantization enhances privacy in both architectures with minimal performance loss, though full-precision SNNs remain more resilient than quantized ANNs. Additionally, we examine the impact of surrogate gradients on privacy in SNNs. Among five evaluated gradients, spike rate escape provides the best privacy-accuracy trade-off, while arctangent increases vulnerability to MIAs. These results reinforce SNNs' inherent privacy advantages and demonstrate that quantization and surrogate gradient selection significantly influence privacy-accuracy trade-offs in SNNs.
Generalizable Reinforcement Learning with Biologically Inspired Hyperdimensional Occupancy Grid Maps for Exploration and Goal-Directed Path Planning
Feb 13, 2025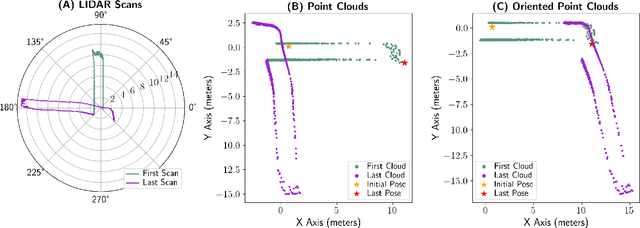
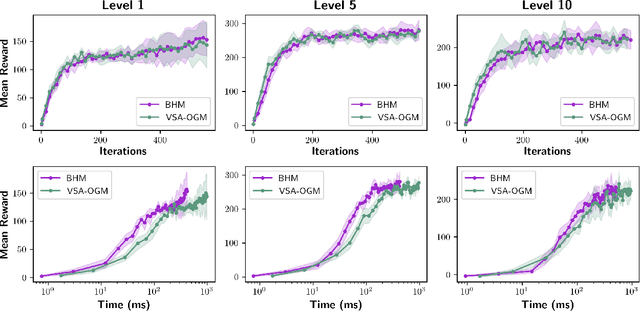
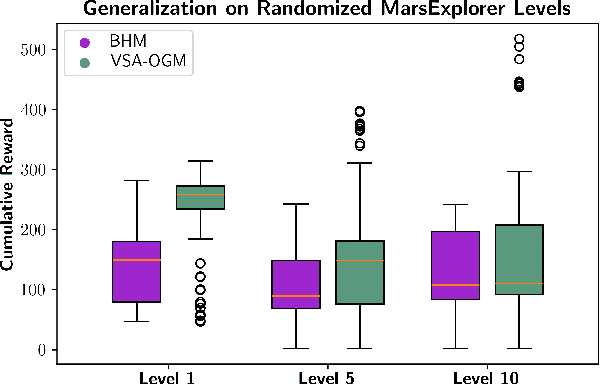
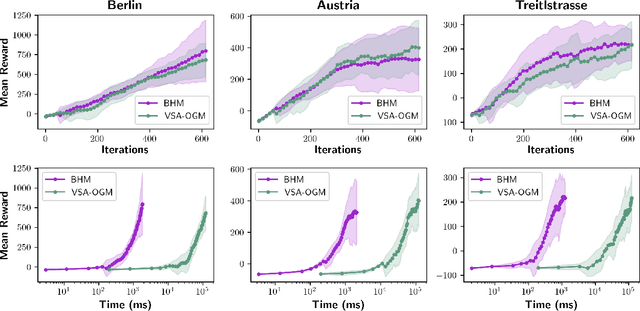
Real-time autonomous systems utilize multi-layer computational frameworks to perform critical tasks such as perception, goal finding, and path planning. Traditional methods implement perception using occupancy grid mapping (OGM), segmenting the environment into discretized cells with probabilistic information. This classical approach is well-established and provides a structured input for downstream processes like goal finding and path planning algorithms. Recent approaches leverage a biologically inspired mathematical framework known as vector symbolic architectures (VSA), commonly known as hyperdimensional computing, to perform probabilistic OGM in hyperdimensional space. This approach, VSA-OGM, provides native compatibility with spiking neural networks, positioning VSA-OGM as a potential neuromorphic alternative to conventional OGM. However, for large-scale integration, it is essential to assess the performance implications of VSA-OGM on downstream tasks compared to established OGM methods. This study examines the efficacy of VSA-OGM against a traditional OGM approach, Bayesian Hilbert Maps (BHM), within reinforcement learning based goal finding and path planning frameworks, across a controlled exploration environment and an autonomous driving scenario inspired by the F1-Tenth challenge. Our results demonstrate that VSA-OGM maintains comparable learning performance across single and multi-scenario training configurations while improving performance on unseen environments by approximately 47%. These findings highlight the increased generalizability of policy networks trained with VSA-OGM over BHM, reinforcing its potential for real-world deployment in diverse environments.
Do Spikes Protect Privacy? Investigating Black-Box Model Inversion Attacks in Spiking Neural Networks
Feb 08, 2025
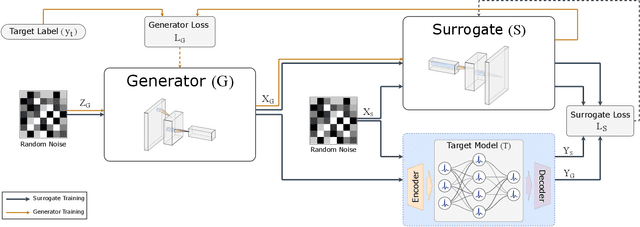
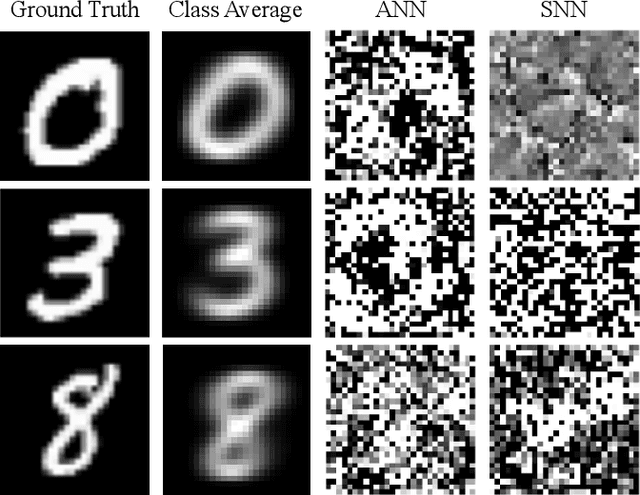
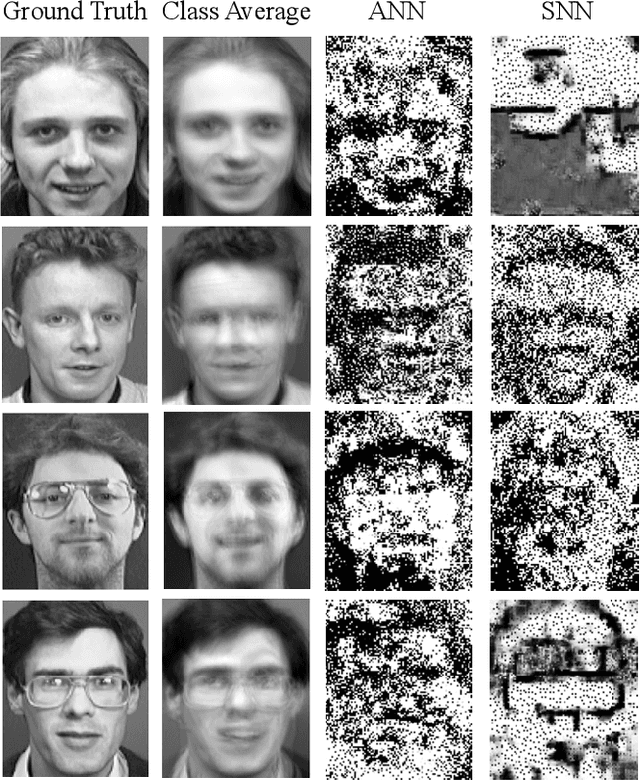
As machine learning models become integral to security-sensitive applications, concerns over data leakage from adversarial attacks continue to rise. Model Inversion (MI) attacks pose a significant privacy threat by enabling adversaries to reconstruct training data from model outputs. While MI attacks on Artificial Neural Networks (ANNs) have been widely studied, Spiking Neural Networks (SNNs) remain largely unexplored in this context. Due to their event-driven and discrete computations, SNNs introduce fundamental differences in information processing that may offer inherent resistance to such attacks. A critical yet underexplored aspect of this threat lies in black-box settings, where attackers operate through queries without direct access to model parameters or gradients-representing a more realistic adversarial scenario in deployed systems. This work presents the first study of black-box MI attacks on SNNs. We adapt a generative adversarial MI framework to the spiking domain by incorporating rate-based encoding for input transformation and decoding mechanisms for output interpretation. Our results show that SNNs exhibit significantly greater resistance to MI attacks than ANNs, as demonstrated by degraded reconstructions, increased instability in attack convergence, and overall reduced attack effectiveness across multiple evaluation metrics. Further analysis suggests that the discrete and temporally distributed nature of SNN decision boundaries disrupts surrogate modeling, limiting the attacker's ability to approximate the target model.
Are Neuromorphic Architectures Inherently Privacy-preserving? An Exploratory Study
Nov 10, 2024
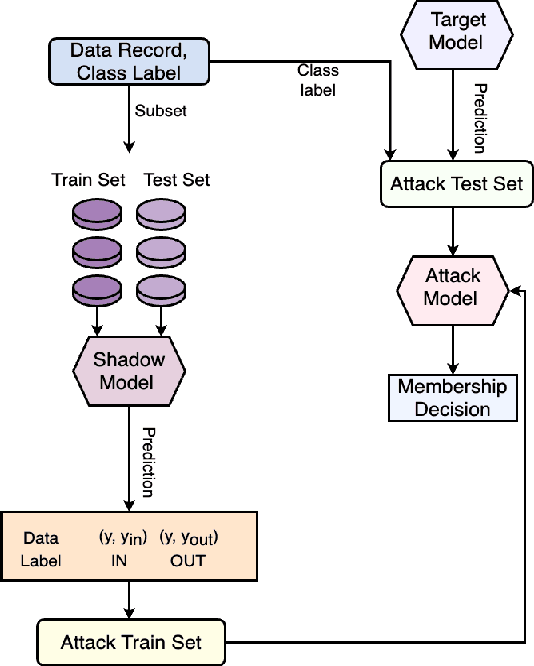
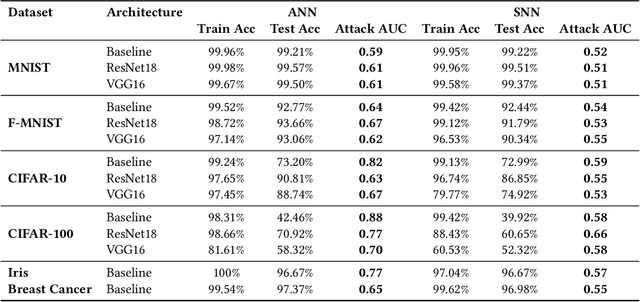
While machine learning (ML) models are becoming mainstream, especially in sensitive application areas, the risk of data leakage has become a growing concern. Attacks like membership inference (MIA) have shown that trained models can reveal sensitive data, jeopardizing confidentiality. While traditional Artificial Neural Networks (ANNs) dominate ML applications, neuromorphic architectures, specifically Spiking Neural Networks (SNNs), are emerging as promising alternatives due to their low power consumption and event-driven processing, akin to biological neurons. Privacy in ANNs is well-studied; however, little work has explored the privacy-preserving properties of SNNs. This paper examines whether SNNs inherently offer better privacy. Using MIAs, we assess the privacy resilience of SNNs versus ANNs across diverse datasets. We analyze the impact of learning algorithms (surrogate gradient and evolutionary), frameworks (snnTorch, TENNLab, LAVA), and parameters on SNN privacy. Our findings show that SNNs consistently outperform ANNs in privacy preservation, with evolutionary algorithms offering additional resilience. For instance, on CIFAR-10, SNNs achieve an AUC of 0.59, significantly lower than ANNs' 0.82, and on CIFAR-100, SNNs maintain an AUC of 0.58 compared to ANNs' 0.88. Additionally, we explore the privacy-utility trade-off with Differentially Private Stochastic Gradient Descent (DPSGD), finding that SNNs sustain less accuracy loss than ANNs under similar privacy constraints.
Spiking Neural Networks as a Controller for Emergent Swarm Agents
Oct 21, 2024Drones which can swarm and loiter in a certain area cost hundreds of dollars, but mosquitos can do the same and are essentially worthless. To control swarms of low-cost robots, researchers may end up spending countless hours brainstorming robot configurations and policies to ``organically" create behaviors which do not need expensive sensors and perception. Existing research explores the possible emergent behaviors in swarms of robots with only a binary sensor and a simple but hand-picked controller structure. Even agents in this highly limited sensing, actuation, and computational capability class can exhibit relatively complex global behaviors such as aggregation, milling, and dispersal, but finding the local interaction rules that enable more collective behaviors remains a significant challenge. This paper investigates the feasibility of training spiking neural networks to find those local interaction rules that result in particular emergent behaviors. In this paper, we focus on simulating a specific milling behavior already known to be producible using very simple binary sensing and acting agents. To do this, we use evolutionary algorithms to evolve not only the parameters (the weights, biases, and delays) of a spiking neural network, but also its structure. To create a baseline, we also show an evolutionary search strategy over the parameters for the incumbent hand-picked binary controller structure. Our simulations show that spiking neural networks can be evolved in binary sensing agents to form a mill.