 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDigital Twins in the Cloud: A Modular, Scalable and Interoperable Framework for Accelerating Verification and Validation of Autonomous Driving Solutions
May 19, 2025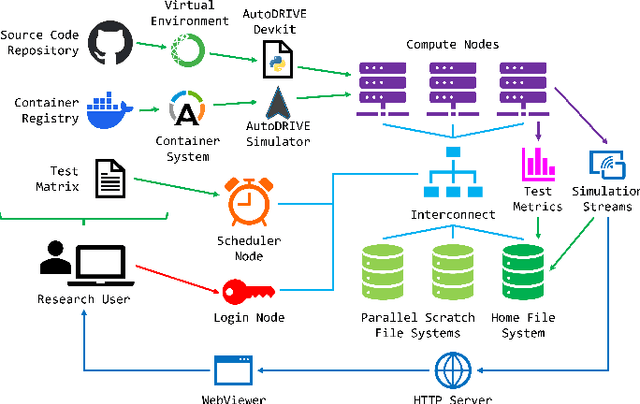
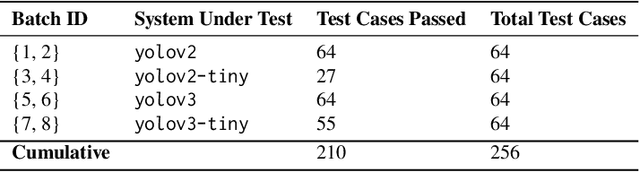
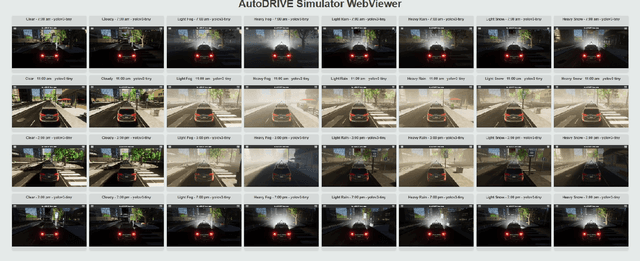
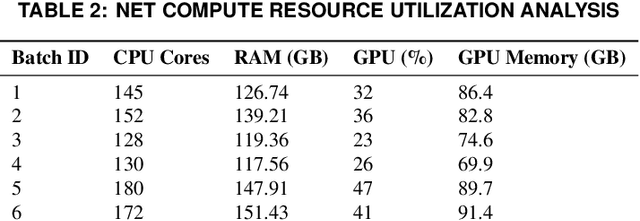
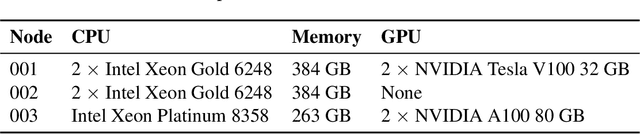
Verification and validation (V&V) of autonomous vehicles (AVs) typically requires exhaustive testing across a variety of operating environments and driving scenarios including rare, extreme, or hazardous situations that might be difficult or impossible to capture in reality. Additionally, physical V&V methods such as track-based evaluations or public-road testing are often constrained by time, cost, and safety, which motivates the need for virtual proving grounds. However, the fidelity and scalability of simulation-based V&V methods can quickly turn into a bottleneck. In such a milieu, this work proposes a virtual proving ground that flexibly scales digital twins within high-performance computing clusters (HPCCs) and automates the V&V process. Here, digital twins enable high-fidelity virtual representation of the AV and its operating environments, allowing extensive scenario-based testing. Meanwhile, HPCC infrastructure brings substantial advantages in terms of computational power and scalability, enabling rapid iterations of simulations, processing and storage of massive amounts of data, and deployment of large-scale test campaigns, thereby reducing the time and cost associated with the V&V process. We demonstrate the efficacy of this approach through a case study that focuses on the variability analysis of a candidate autonomy algorithm to identify potential vulnerabilities in its perception, planning, and control sub-systems. The modularity, scalability, and interoperability of the proposed framework are demonstrated by deploying a test campaign comprising 256 test cases on two different HPCC architectures to ensure continuous operation in a publicly shared resource setting. The findings highlight the ability of the proposed framework to accelerate and streamline the V&V process, thereby significantly compressing (~30x) the timeline.
A Systematic Digital Engineering Approach to Verification & Validation of Autonomous Ground Vehicles in Off-Road Environments
Mar 18, 2025



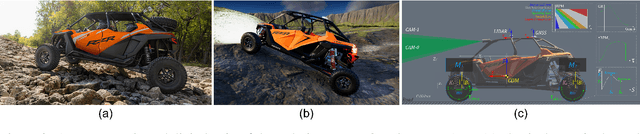
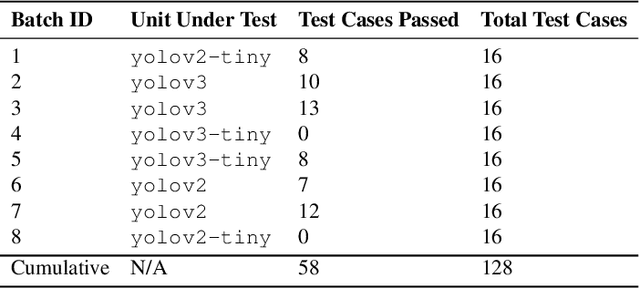
The engineering community currently encounters significant challenges in the systematic development and validation of autonomy algorithms for off-road ground vehicles. These challenges are posed by unusually high test parameters and algorithmic variants. In order to address these pain points, this work presents an optimized digital engineering framework that tightly couples digital twin simulations with model-based systems engineering (MBSE) and model-based design (MBD) workflows. The efficacy of the proposed framework is demonstrated through an end-to-end case study of an autonomous light tactical vehicle (LTV) performing visual servoing to drive along a dirt road and reacting to any obstacles or environmental changes. The presented methodology allows for traceable requirements engineering, efficient variant management, granular parameter sweep setup, systematic test-case definition, and automated execution of the simulations. The candidate off-road autonomy algorithm is evaluated for satisfying requirements against a battery of 128 test cases, which is procedurally generated based on the test parameters (times of the day and weather conditions) and algorithmic variants (perception, planning, and control sub-systems). Finally, the test results and key performance indicators are logged, and the test report is generated automatically. This then allows for manual as well as automated data analysis with traceability and tractability across the digital thread.
Digital Twins Meet the Koopman Operator: Data-Driven Learning for Robust Autonomy
Sep 16, 2024



Contrary to on-road autonomous navigation, off-road autonomy is complicated by various factors ranging from sensing challenges to terrain variability. In such a milieu, data-driven approaches have been commonly employed to capture intricate vehicle-environment interactions effectively. However, the success of data-driven methods depends crucially on the quality and quantity of data, which can be compromised by large variability in off-road environments. To address these concerns, we present a novel workflow to recreate the exact vehicle and its target operating conditions digitally for domain-specific data generation. This enables us to effectively model off-road vehicle dynamics from simulation data using the Koopman operator theory, and employ the obtained models for local motion planning and optimal vehicle control. The capabilities of the proposed methodology are demonstrated through an autonomous navigation problem of a 1:5 scale vehicle, where a terrain-informed planner is employed for global mission planning. Results indicate a substantial improvement in off-road navigation performance with the proposed algorithm (5.84x) and underscore the efficacy of digital twinning in terms of improving the sample efficiency (3.2x) and reducing the sim2real gap (5.2%).
Metaverse for Safer Roadways: An Immersive Digital Twin Framework for Exploring Human-Autonomy Coexistence in Urban Transportation Systems
Jun 08, 2024Societal-scale deployment of autonomous vehicles requires them to coexist with human drivers, necessitating mutual understanding and coordination among these entities. However, purely real-world or simulation-based experiments cannot be employed to explore such complex interactions due to safety and reliability concerns, respectively. Consequently, this work presents an immersive digital twin framework to explore and experiment with the interaction dynamics between autonomous and non-autonomous traffic participants. Particularly, we employ a mixed-reality human-machine interface to allow human drivers and autonomous agents to observe and interact with each other for testing edge-case scenarios while ensuring safety at all times. To validate the versatility of the proposed framework's modular architecture, we first present a discussion on a set of user experience experiments encompassing 4 different levels of immersion with 4 distinct user interfaces. We then present a case study of uncontrolled intersection traversal to demonstrate the efficacy of the proposed framework in validating the interactions of a primary human-driven, autonomous, and connected autonomous vehicle with a secondary semi-autonomous vehicle. The proposed framework has been openly released to guide the future of autonomy-oriented digital twins and research on human-autonomy coexistence.
Off-Road Autonomy Validation Using Scalable Digital Twin Simulations Within High-Performance Computing Clusters
May 08, 2024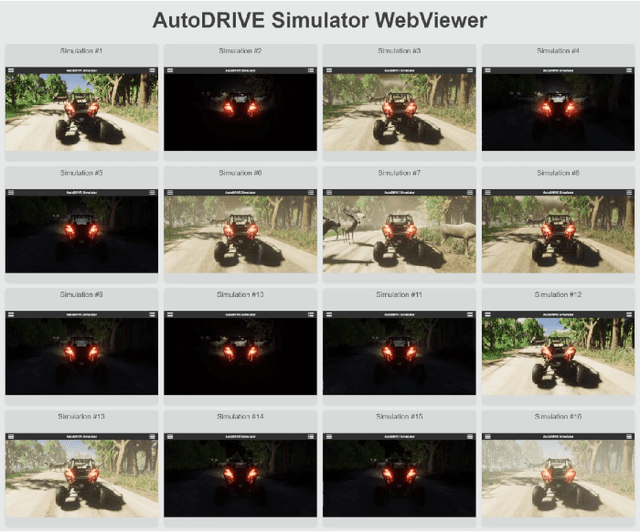
Off-road autonomy validation presents unique challenges due to the unpredictable and dynamic nature of off-road environments. Traditional methods focusing on sequentially sweeping across the parameter space for variability analysis struggle to comprehensively assess the performance and safety of off-road autonomous systems within the imposed time constraints. This paper proposes leveraging scalable digital twin simulations within high-performance computing (HPC) clusters to address this challenge. By harnessing the computational power of HPC clusters, our approach aims to provide a scalable and efficient means to validate off-road autonomy algorithms, enabling rapid iteration and testing of autonomy algorithms under various conditions. We demonstrate the effectiveness of our framework through performance evaluations of the HPC cluster in terms of simulation parallelization and present the systematic variability analysis of a candidate off-road autonomy algorithm to identify potential vulnerabilities in the autonomy stack's perception, planning and control modules.
A Scalable and Parallelizable Digital Twin Framework for Sustainable Sim2Real Transition of Multi-Agent Reinforcement Learning Systems
Mar 16, 2024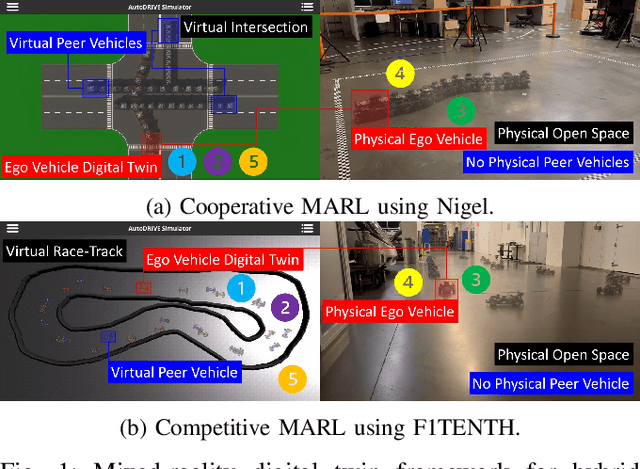

This work presents a sustainable multi-agent deep reinforcement learning framework capable of selectively scaling parallelized training workloads on-demand, and transferring the trained policies from simulation to reality using minimal hardware resources. We introduce AutoDRIVE Ecosystem as an enabling digital twin framework to train, deploy, and transfer cooperative as well as competitive multi-agent reinforcement learning policies from simulation to reality. Particularly, we first investigate an intersection traversal problem of 4 cooperative vehicles (Nigel) that share limited state information in single as well as multi-agent learning settings using a common policy approach. We then investigate an adversarial autonomous racing problem of 2 vehicles (F1TENTH) using an individual policy approach. In either set of experiments, a decentralized learning architecture was adopted, which allowed robust training and testing of the policies in stochastic environments. The agents were provided with realistically sparse observation spaces, and were restricted to sample control actions that implicitly satisfied the imposed kinodynamic and safety constraints. The experimental results for both problem statements are reported in terms of quantitative metrics and qualitative remarks for training as well as deployment phases. We also discuss agent and environment parallelization techniques adopted to efficiently accelerate MARL training, while analyzing their computational performance. Finally, we demonstrate a resource-aware transition of the trained policies from simulation to reality using the proposed digital twin framework.
Autonomy Oriented Digital Twins for Real2Sim2Real Autoware Deployment
Feb 22, 2024Modeling and simulation of autonomous vehicles plays a crucial role in achieving enterprise-scale realization that aligns with technical, business and regulatory requirements. Contemporary trends in digital lifecycle treatment have proven beneficial to support SBD as well as V&V of these complex systems. Although, the development of appropriate fidelity simulation models capable of capturing the intricate real-world physics and graphics (real2sim), while enabling real-time interactivity for decision-making, has remained a challenge. Nevertheless, recent advances in AI-based tools and workflows, such as online deep-learning algorithms leveraging live-streaming data sources, offer the tantalizing potential for real-time system-identification and adaptive modeling to simulate vehicles, environments, as well as their interactions. This transition from virtual prototypes to digital twins not only improves simulation fidelity and real-time factor, but can also support the development of online adaption/augmentation techniques that can help bridge the gap between simulation and reality (sim2real). In such a milieu, this work focuses on developing autonomy-oriented digital twins of vehicles across different scales and configurations to help support the streamlined development and deployment of Autoware stack, using a unified real2sim2real toolchain. Particularly, the core deliverable for this project was to integrate the Autoware stack with AutoDRIVE Ecosystem to demonstrate end-to-end task of map-based autonomous navigation. This work discusses the development of vehicle and environment digital twins using AutoDRIVE Ecosystem, along with various APIs and HMIs to connect with the same, followed by a detailed section on AutoDRIVE-Autoware integration. Furthermore, this study describes the first-ever off-road deployment of the Autoware stack, expanding the ODD beyond on-road autonomous navigation.
Towards Validation of Autonomous Vehicles Across Scales using an Integrated Digital Twin Framework
Feb 20, 2024Autonomous vehicle platforms of varying spatial scales are employed within the research and development spectrum based on space, safety and monetary constraints. However, deploying and validating autonomy algorithms across varying operational scales presents challenges due to scale-specific dynamics, sensor integration complexities, computational constraints, regulatory considerations, environmental variability, interaction with other traffic participants and scalability concerns. In such a milieu, this work focuses on developing a unified framework for modeling and simulating digital twins of autonomous vehicle platforms across different scales and operational design domains (ODDs) to help support the streamlined development and validation of autonomy software stacks. Particularly, this work discusses the development of digital twin representations of 4 autonomous ground vehicles, which span across 3 different scales and target 3 distinct ODDs. We study the adoption of these autonomy-oriented digital twins to deploy a common autonomy software stack with an aim of end-to-end map-based navigation to achieve the ODD-specific objective(s) for each vehicle. Finally, we also discuss the flexibility of the proposed framework to support virtual, hybrid as well as physical testing with seamless sim2real transfer.
Nigel -- Mechatronic Design and Robust Sim2Real Control of an Over-Actuated Autonomous Vehicle
Jan 21, 2024Simulation to reality (sim2real) transfer from a dynamics and controls perspective usually involves re-tuning or adapting the designed algorithms to suit real-world operating conditions, which often violates the performance guarantees established originally. This work presents a generalizable framework for achieving reliable sim2real transfer of autonomy-oriented control systems using multi-model multi-objective robust optimal control synthesis, which lends well to uncertainty handling and disturbance rejection with theoretical guarantees. Particularly, this work is centered around an actuation-redundant scaled autonomous vehicle called Nigel, with independent all-wheel drive and independent all-wheel steering architecture, whose enhanced configuration space bodes well for robust control applications. To this end, we present a systematic study on the complete mechatronic design, dynamics modeling, parameter identification, and robust stabilizing as well as steady-state tracking control of Nigel using the proposed framework, with experimental validation.
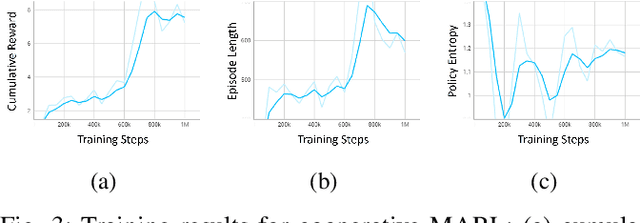
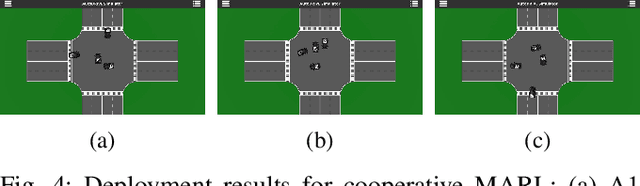
Multi-Agent Deep Reinforcement Learning for Cooperative and Competitive Autonomous Vehicles using AutoDRIVE Ecosystem
Sep 30, 2023



This work presents a modular and parallelizable multi-agent deep reinforcement learning framework for imbibing cooperative as well as competitive behaviors within autonomous vehicles. We introduce AutoDRIVE Ecosystem as an enabler to develop physically accurate and graphically realistic digital twins of Nigel and F1TENTH, two scaled autonomous vehicle platforms with unique qualities and capabilities, and leverage this ecosystem to train and deploy multi-agent reinforcement learning policies. We first investigate an intersection traversal problem using a set of cooperative vehicles (Nigel) that share limited state information with each other in single as well as multi-agent learning settings using a common policy approach. We then investigate an adversarial head-to-head autonomous racing problem using a different set of vehicles (F1TENTH) in a multi-agent learning setting using an individual policy approach. In either set of experiments, a decentralized learning architecture was adopted, which allowed robust training and testing of the approaches in stochastic environments, since the agents were mutually independent and exhibited asynchronous motion behavior. The problems were further aggravated by providing the agents with sparse observation spaces and requiring them to sample control commands that implicitly satisfied the imposed kinodynamic as well as safety constraints. The experimental results for both problem statements are reported in terms of quantitative metrics and qualitative remarks for training as well as deployment phases.