 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety Critical Model Predictive Control Using Discrete-Time Control Density Functions
Sep 16, 2025This paper presents MPC-CDF, a new approach integrating control density functions (CDFs) within a model predictive control (MPC) framework to ensure safety-critical control in nonlinear dynamical systems. By using the dual formulation of the navigation problem, we incorporate CDFs into the MPC framework, ensuring both convergence and safety in a discrete-time setting. These density functions are endowed with a physical interpretation, where the associated measure signifies the occupancy of system trajectories. Leveraging this occupancy-based perspective, we synthesize safety-critical controllers using the proposed MPC-CDF framework. We illustrate the safety properties of this framework using a unicycle model and compare it with a control barrier function-based method. The efficacy of this approach is demonstrated in the autonomous safe navigation of an underwater vehicle, which avoids complex and arbitrary obstacles while achieving the desired level of safety.
Nigel -- Mechatronic Design and Robust Sim2Real Control of an Over-Actuated Autonomous Vehicle
Jan 21, 2024Simulation to reality (sim2real) transfer from a dynamics and controls perspective usually involves re-tuning or adapting the designed algorithms to suit real-world operating conditions, which often violates the performance guarantees established originally. This work presents a generalizable framework for achieving reliable sim2real transfer of autonomy-oriented control systems using multi-model multi-objective robust optimal control synthesis, which lends well to uncertainty handling and disturbance rejection with theoretical guarantees. Particularly, this work is centered around an actuation-redundant scaled autonomous vehicle called Nigel, with independent all-wheel drive and independent all-wheel steering architecture, whose enhanced configuration space bodes well for robust control applications. To this end, we present a systematic study on the complete mechatronic design, dynamics modeling, parameter identification, and robust stabilizing as well as steady-state tracking control of Nigel using the proposed framework, with experimental validation.
High-throughput Cotton Phenotyping Big Data Pipeline Lambda Architecture Computer Vision Deep Neural Networks
May 09, 2023In this study, we propose a big data pipeline for cotton bloom detection using a Lambda architecture, which enables real-time and batch processing of data. Our proposed approach leverages Azure resources such as Data Factory, Event Grids, Rest APIs, and Databricks. This work is the first to develop and demonstrate the implementation of such a pipeline for plant phenotyping through Azure's cloud computing service. The proposed pipeline consists of data preprocessing, object detection using a YOLOv5 neural network model trained through Azure AutoML, and visualization of object detection bounding boxes on output images. The trained model achieves a mean Average Precision (mAP) score of 0.96, demonstrating its high performance for cotton bloom classification. We evaluate our Lambda architecture pipeline using 9000 images yielding an optimized runtime of 34 minutes. The results illustrate the scalability of the proposed pipeline as a solution for deep learning object detection, with the potential for further expansion through additional Azure processing cores. This work advances the scientific research field by providing a new method for cotton bloom detection on a large dataset and demonstrates the potential of utilizing cloud computing resources, specifically Azure, for efficient and accurate big data processing in precision agriculture.
Optimal Lighting Control in Greenhouses Using Bayesian Neural Networks for Sunlight Prediction
May 07, 2022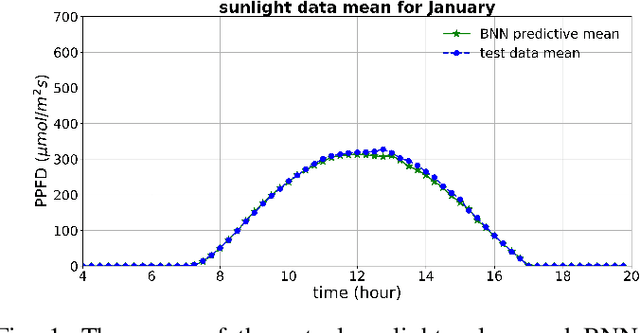
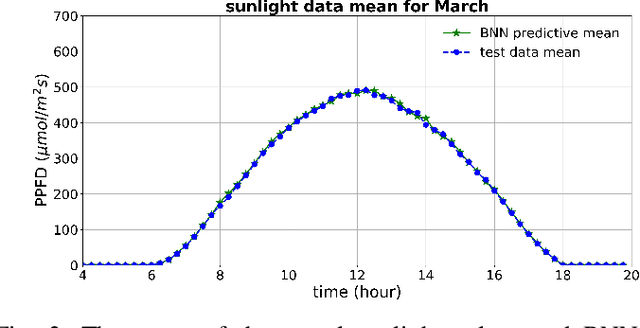
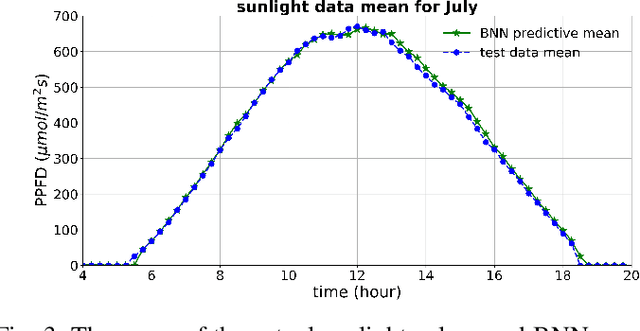
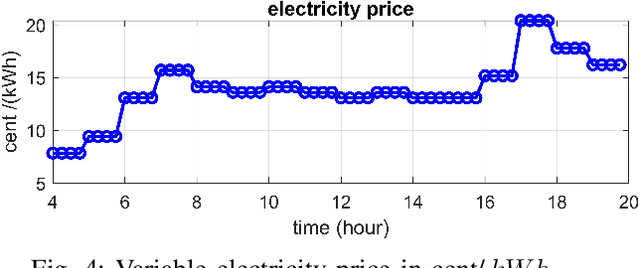
Controlling the environmental parameters, including light in greenhouses, increases the crop yield; however, the electricity cost of supplemental lighting can be high. Therefore, the importance of applying cost-effective lighting methods arises. In this paper, an optimal supplemental lighting control approach is developed considering a variational inference Bayesian Neural Network (BNN) model for sunlight prediction. The predictive model is validated through testing the model on the historical solar data of a site located at North Carolina ($R^{2}$=0.9971, RMSE=1.8%). The proposed lighting approach is shown to minimize electricity cost by considering the BNN-based sunlight prediction, plant light needs, and variable electricity pricing when solving the underlying optimization problem. For evaluation, the new strategy is compared to: 1) a Markov-based prediction method, which solves the same optimization problem, assuming a Markov model for sunlight prediction; 2) a heuristic method which aims to supply a fixed amount of light. Simulation studies are conducted to examine the electricity cost improvements of the BNN-based approach. The results show that the BNN-based approach reduces cost by (on average) 2.27% and 43.91% compared to the Markov prediction-based method and the heuristic method, respectively, throughout a year.
Impact of Information Flow Topology on Safety of Tightly-coupled Connected and Automated Vehicle Platoons Utilizing Stochastic Control
Mar 29, 2022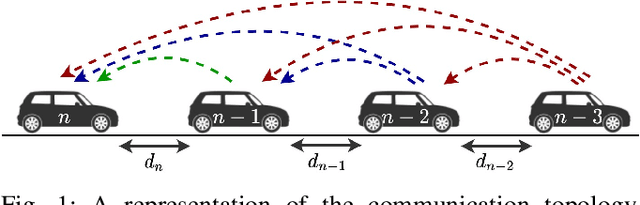
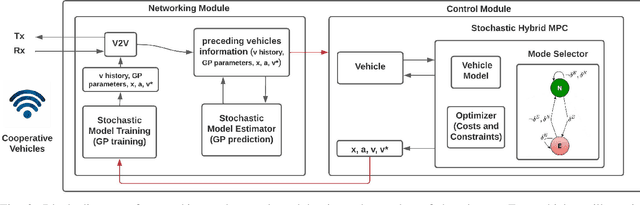
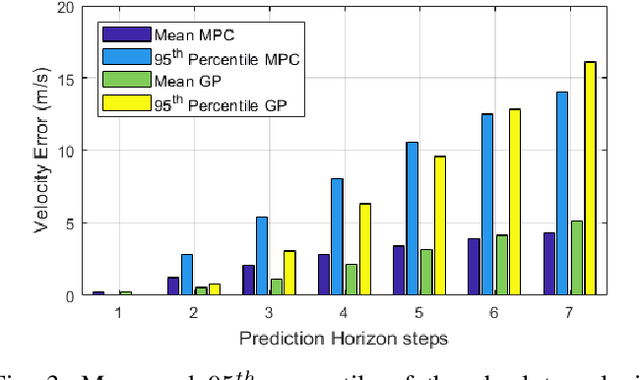
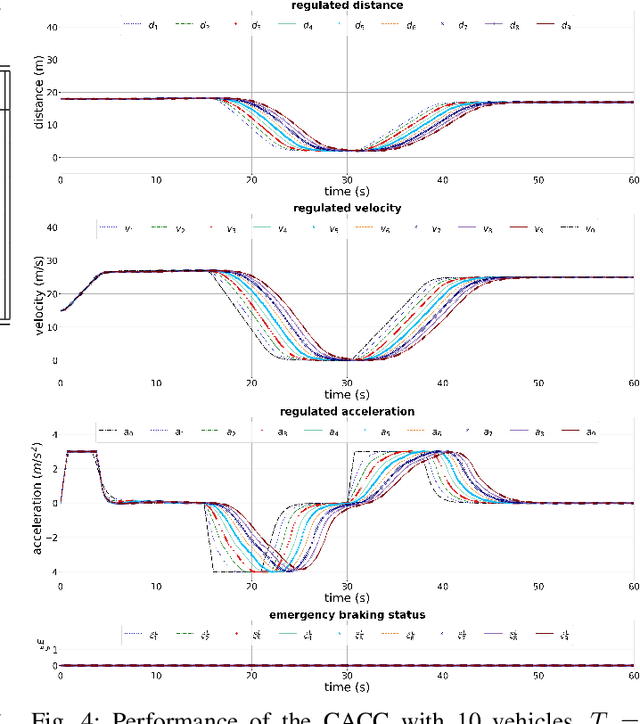
Cooperative driving, enabled by Vehicle-to-Everything (V2X) communication, is expected to significantly contribute to the transportation system's safety and efficiency. Cooperative Adaptive Cruise Control (CACC), a major cooperative driving application, has been the subject of many studies in recent years. The primary motivation behind using CACC is to reduce traffic congestion and improve traffic flow, traffic throughput, and highway capacity. Since the information flow between cooperative vehicles can significantly affect the dynamics of a platoon, the design and performance of control components are tightly dependent on the communication component performance. In addition, the choice of Information Flow Topology (IFT) can affect certain platoons properties such as stability and scalability. Although cooperative vehicles perception can be expanded to multiple predecessors information by using V2X communication, the communication technologies still suffer from scalability issues. Therefore, cooperative vehicles are required to predict each other's behavior to compensate for the effects of non-ideal communication. The notion of Model-Based Communication (MBC) was proposed to enhance cooperative vehicles perception under non-ideal communication by introducing a new flexible content structure for broadcasting joint vehicles dynamic/drivers behavior models. By utilizing a non-parametric (Bayesian) modeling scheme, i.e., Gaussian Process Regression (GPR), and the MBC concept, this paper develops a discrete hybrid stochastic model predictive control approach and examines the impact of communication losses and different information flow topologies on the performance and safety of the platoon. The results demonstrate an improvement in response time and safety using more vehicles information, validating the potential of cooperation to attenuate disturbances and improve traffic flow and safety.
Finite State Markov Modeling of C-V2X Erasure Links For Performance and Stability Analysis of Platooning Applications
Nov 13, 2021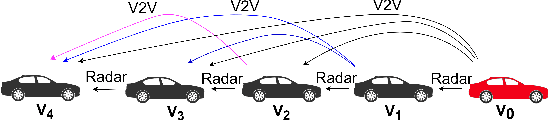
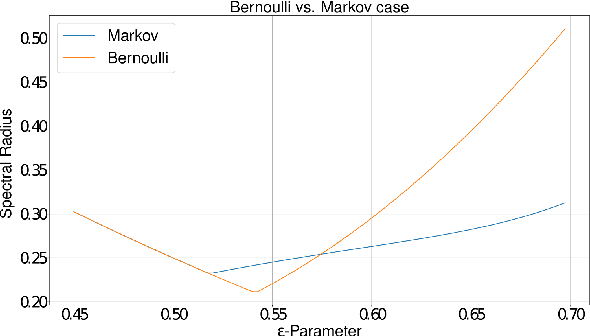
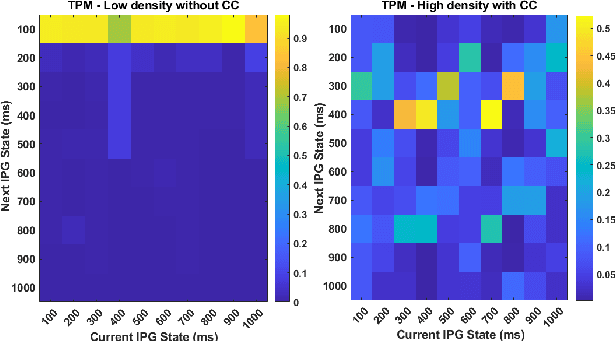

Cooperative driving systems, such as platooning, rely on communication and information exchange to create situational awareness for each agent. Design and performance of control components are therefore tightly coupled with communication component performance. The information flow between vehicles can significantly affect the dynamics of a platoon. Therefore, both the performance and the stability of a platoon depend not only on the vehicle's controller but also on the information flow Topology (IFT). The IFT can cause limitations for certain platoon properties, i.e., stability and scalability. Cellular Vehicle-To-Everything (C-V2X) has emerged as one of the main communication technologies to support connected and automated vehicle applications. As a result of packet loss, wireless channels create random link interruption and changes in network topologies. In this paper, we model the communication links between vehicles with a first-order Markov model to capture the prevalent time correlations for each link. These models enable performance evaluation through better approximation of communication links during system design stages. Our approach is to use data from experiments to model the Inter-Packet Gap (IPG) using Markov chains and derive transition probability matrices for consecutive IPG states. Training data is collected from high fidelity simulations using models derived based on empirical data for a variety of different vehicle densities and communication rates. Utilizing the IPG models, we analyze the mean-square stability of a platoon of vehicles with the standard consensus protocol tuned for ideal communication and compare the degradation in performance for different scenarios.
Gaussian Process based Stochastic Model Predictive Control for Cooperative Adaptive Cruise Control
Nov 13, 2021
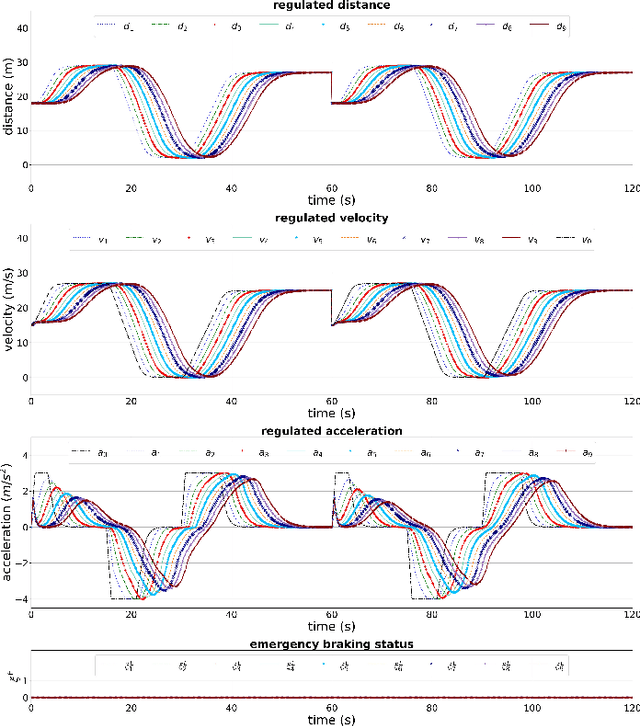
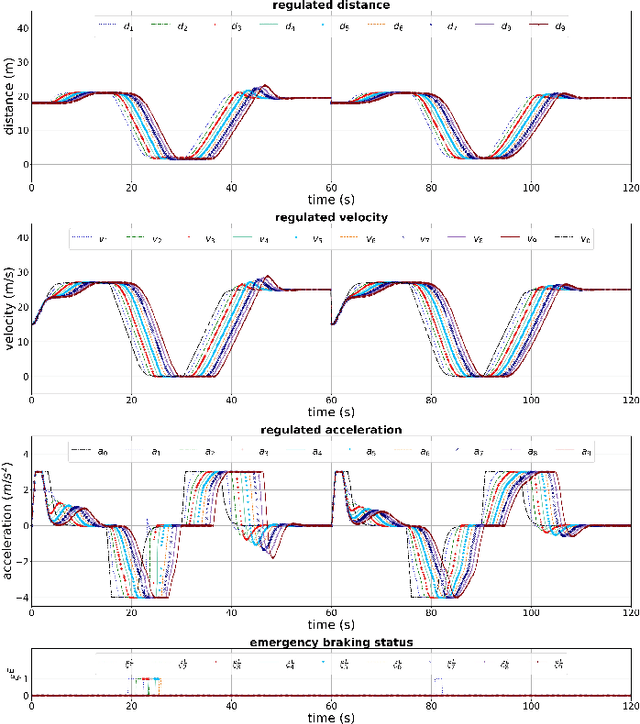

Cooperative driving relies on communication among vehicles to create situational awareness. One application of cooperative driving is Cooperative Adaptive Cruise Control (CACC) that aims at enhancing highway transportation safety and capacity. Model-based communication (MBC) is a new paradigm with a flexible content structure for broadcasting joint vehicle-driver predictive behavioral models. The vehicle's complex dynamics and diverse driving behaviors add complexity to the modeling process. Gaussian process (GP) is a fully data-driven and non-parametric Bayesian modeling approach which can be used as a modeling component of MBC. The knowledge about the uncertainty is propagated through predictions by generating local GPs for vehicles and broadcasting their hyper-parameters as a model to the neighboring vehicles. In this research study, GP is used to model each vehicle's speed trajectory, which allows vehicles to access the future behavior of their preceding vehicle during communication loss and/or low-rate communication. Besides, to overcome the safety issues in a vehicle platoon, two operating modes for each vehicle are considered; free following and emergency braking. This paper presents a discrete hybrid stochastic model predictive control, which incorporates system modes as well as uncertainties captured by GP models. The proposed control design approach finds the optimal vehicle speed trajectory with the goal of achieving a safe and efficient platoon of vehicles with small inter-vehicle gap while reducing the reliance of the vehicles on a frequent communication. Simulation studies demonstrate the efficacy of the proposed controller considering the aforementioned communication paradigm with low-rate intermittent communication.