 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContext-Aware Target Classification with Hybrid Gaussian Process prediction for Cooperative Vehicle Safety systems
Dec 24, 2022Vehicle-to-Everything (V2X) communication has been proposed as a potential solution to improve the robustness and safety of autonomous vehicles by improving coordination and removing the barrier of non-line-of-sight sensing. Cooperative Vehicle Safety (CVS) applications are tightly dependent on the reliability of the underneath data system, which can suffer from loss of information due to the inherent issues of their different components, such as sensors failures or the poor performance of V2X technologies under dense communication channel load. Particularly, information loss affects the target classification module and, subsequently, the safety application performance. To enable reliable and robust CVS systems that mitigate the effect of information loss, we proposed a Context-Aware Target Classification (CA-TC) module coupled with a hybrid learning-based predictive modeling technique for CVS systems. The CA-TC consists of two modules: A Context-Aware Map (CAM), and a Hybrid Gaussian Process (HGP) prediction system. Consequently, the vehicle safety applications use the information from the CA-TC, making them more robust and reliable. The CAM leverages vehicles path history, road geometry, tracking, and prediction; and the HGP is utilized to provide accurate vehicles' trajectory predictions to compensate for data loss (due to communication congestion) or sensor measurements' inaccuracies. Based on offline real-world data, we learn a finite bank of driver models that represent the joint dynamics of the vehicle and the drivers' behavior. We combine offline training and online model updates with on-the-fly forecasting to account for new possible driver behaviors. Finally, our framework is validated using simulation and realistic driving scenarios to confirm its potential in enhancing the robustness and reliability of CVS systems.
Impact of Information Flow Topology on Safety of Tightly-coupled Connected and Automated Vehicle Platoons Utilizing Stochastic Control
Mar 29, 2022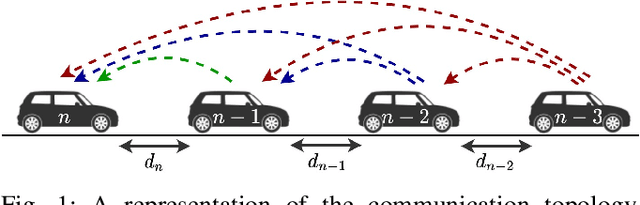
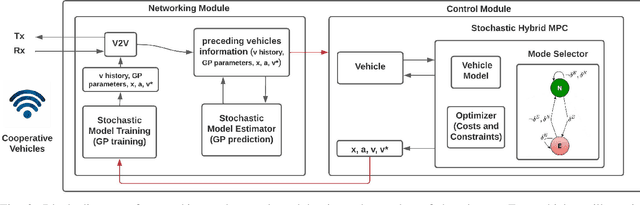
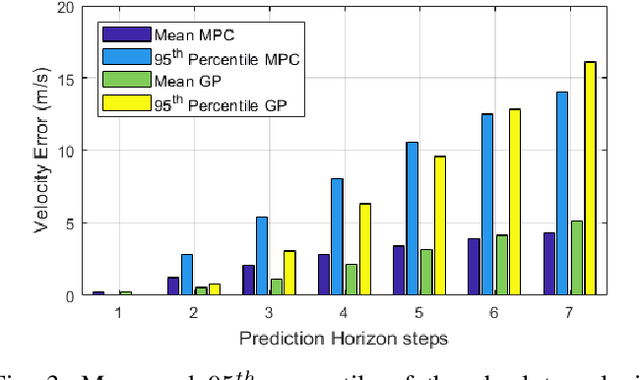
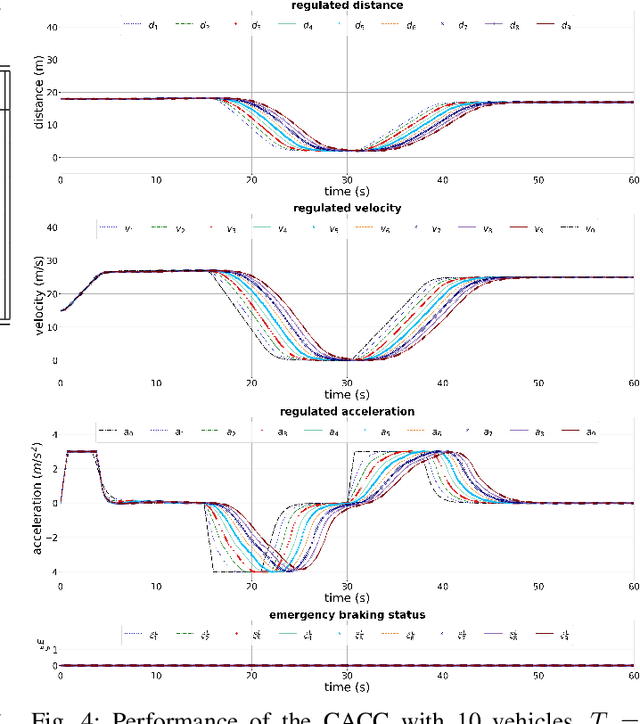
Cooperative driving, enabled by Vehicle-to-Everything (V2X) communication, is expected to significantly contribute to the transportation system's safety and efficiency. Cooperative Adaptive Cruise Control (CACC), a major cooperative driving application, has been the subject of many studies in recent years. The primary motivation behind using CACC is to reduce traffic congestion and improve traffic flow, traffic throughput, and highway capacity. Since the information flow between cooperative vehicles can significantly affect the dynamics of a platoon, the design and performance of control components are tightly dependent on the communication component performance. In addition, the choice of Information Flow Topology (IFT) can affect certain platoons properties such as stability and scalability. Although cooperative vehicles perception can be expanded to multiple predecessors information by using V2X communication, the communication technologies still suffer from scalability issues. Therefore, cooperative vehicles are required to predict each other's behavior to compensate for the effects of non-ideal communication. The notion of Model-Based Communication (MBC) was proposed to enhance cooperative vehicles perception under non-ideal communication by introducing a new flexible content structure for broadcasting joint vehicles dynamic/drivers behavior models. By utilizing a non-parametric (Bayesian) modeling scheme, i.e., Gaussian Process Regression (GPR), and the MBC concept, this paper develops a discrete hybrid stochastic model predictive control approach and examines the impact of communication losses and different information flow topologies on the performance and safety of the platoon. The results demonstrate an improvement in response time and safety using more vehicles information, validating the potential of cooperation to attenuate disturbances and improve traffic flow and safety.
Feature Sharing and Integration for Cooperative Cognition and Perception with Volumetric Sensors
Dec 04, 2020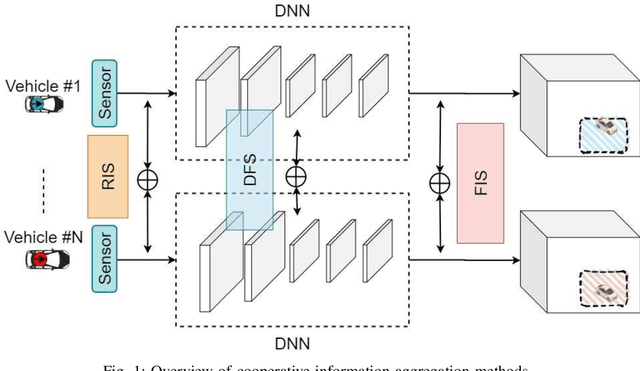
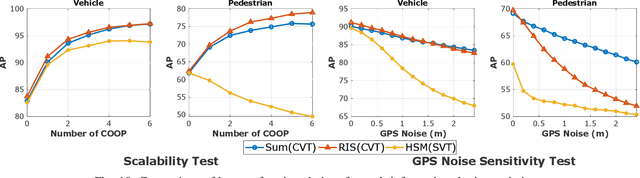
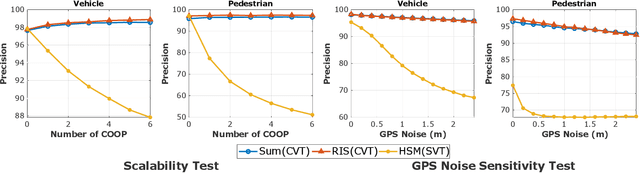
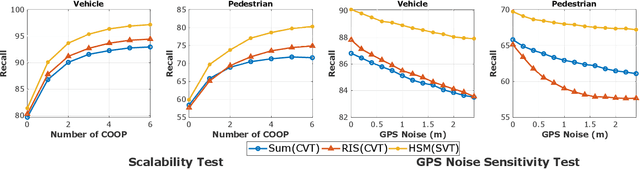
The recent advancement in computational and communication systems has led to the introduction of high-performing neural networks and high-speed wireless vehicular communication networks. As a result, new technologies such as cooperative perception and cognition have emerged, addressing the inherent limitations of sensory devices by providing solutions for the detection of partially occluded targets and expanding the sensing range. However, designing a reliable cooperative cognition or perception system requires addressing the challenges caused by limited network resources and discrepancies between the data shared by different sources. In this paper, we examine the requirements, limitations, and performance of different cooperative perception techniques, and present an in-depth analysis of the notion of Deep Feature Sharing (DFS). We explore different cooperative object detection designs and evaluate their performance in terms of average precision. We use the Volony dataset for our experimental study. The results confirm that the DFS methods are significantly less sensitive to the localization error caused by GPS noise. Furthermore, the results attest that detection gain of DFS methods caused by adding more cooperative participants in the scenes is comparable to raw information sharing technique while DFS enables flexibility in design toward satisfying communication requirements.
Bandwidth-Adaptive Feature Sharing for Cooperative LIDAR Object Detection
Oct 22, 2020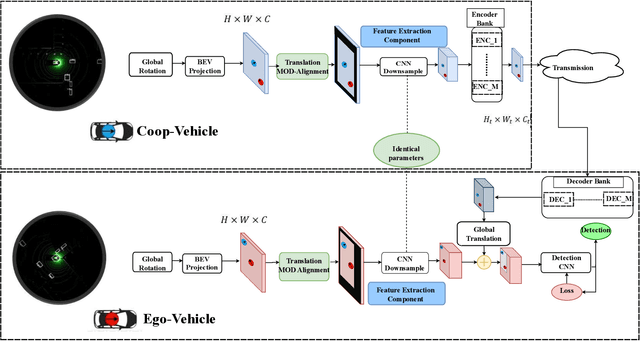
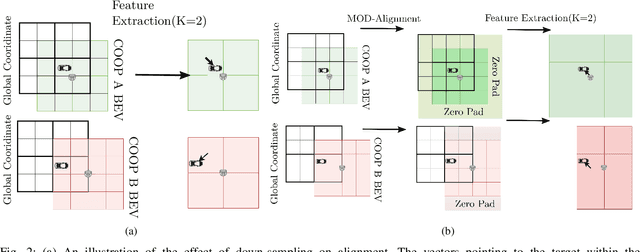
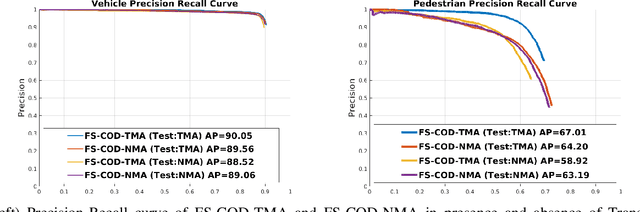
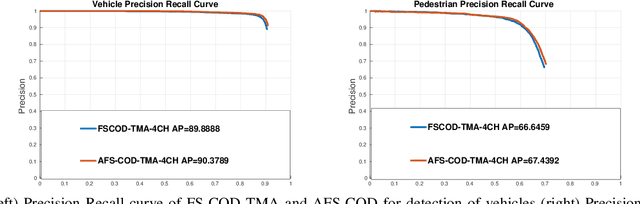
Situational awareness as a necessity in the connected and autonomous vehicles (CAV) domain is the subject of a significant number of researches in recent years. The driver's safety is directly dependent on the robustness, reliability, and scalability of such systems. Cooperative mechanisms have provided a solution to improve situational awareness by utilizing high speed wireless vehicular networks. These mechanisms mitigate problems such as occlusion and sensor range limitation. However, the network capacity is a factor determining the maximum amount of information being shared among cooperative entities. The notion of feature sharing, proposed in our previous work, aims to address these challenges by maintaining a balance between computation and communication load. In this work, we propose a mechanism to add flexibility in adapting to communication channel capacity and a novel decentralized shared data alignment method to further improve cooperative object detection performance. The performance of the proposed framework is verified through experiments on Volony dataset. The results confirm that our proposed framework outperforms our previous cooperative object detection method (FS-COD) in terms of average precision.
Cooperative LIDAR Object Detection via Feature Sharing in Deep Networks
Feb 19, 2020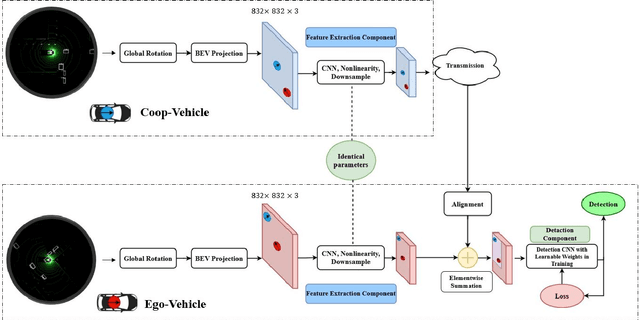
The recent advancements in communication and computational systems has led to significant improvement of situational awareness in connected and autonomous vehicles. Computationally efficient neural networks and high speed wireless vehicular networks have been some of the main contributors to this improvement. However, scalability and reliability issues caused by inherent limitations of sensory and communication systems are still challenging problems. In this paper, we aim to mitigate the effects of these limitations by introducing the concept of feature sharing for cooperative object detection (FS-COD). In our proposed approach, a better understanding of the environment is achieved by sharing partially processed data between cooperative vehicles while maintaining a balance between computation and communication load. This approach is different from current methods of map sharing, or sharing of raw data which are not scalable. The performance of the proposed approach is verified through experiments on Volony dataset. It is shown that the proposed approach has significant performance superiority over the conventional single-vehicle object detection approaches.