 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImpact of Information Flow Topology on Safety of Tightly-coupled Connected and Automated Vehicle Platoons Utilizing Stochastic Control
Mar 29, 2022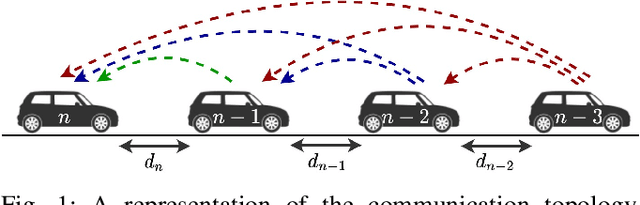
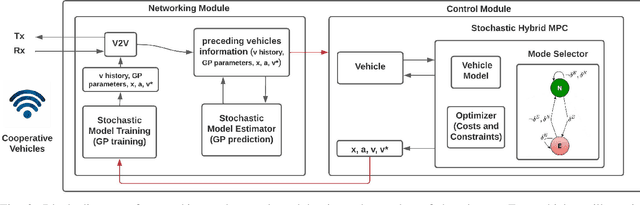
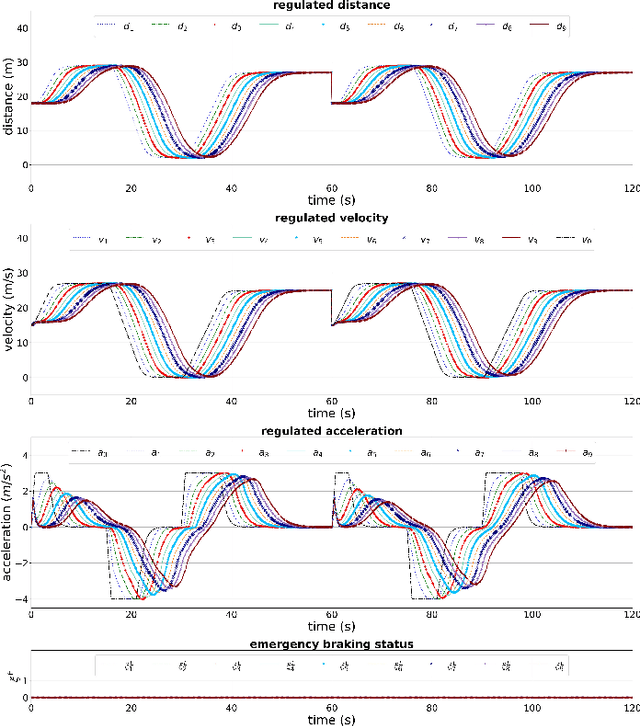
Cooperative driving, enabled by Vehicle-to-Everything (V2X) communication, is expected to significantly contribute to the transportation system's safety and efficiency. Cooperative Adaptive Cruise Control (CACC), a major cooperative driving application, has been the subject of many studies in recent years. The primary motivation behind using CACC is to reduce traffic congestion and improve traffic flow, traffic throughput, and highway capacity. Since the information flow between cooperative vehicles can significantly affect the dynamics of a platoon, the design and performance of control components are tightly dependent on the communication component performance. In addition, the choice of Information Flow Topology (IFT) can affect certain platoons properties such as stability and scalability. Although cooperative vehicles perception can be expanded to multiple predecessors information by using V2X communication, the communication technologies still suffer from scalability issues. Therefore, cooperative vehicles are required to predict each other's behavior to compensate for the effects of non-ideal communication. The notion of Model-Based Communication (MBC) was proposed to enhance cooperative vehicles perception under non-ideal communication by introducing a new flexible content structure for broadcasting joint vehicles dynamic/drivers behavior models. By utilizing a non-parametric (Bayesian) modeling scheme, i.e., Gaussian Process Regression (GPR), and the MBC concept, this paper develops a discrete hybrid stochastic model predictive control approach and examines the impact of communication losses and different information flow topologies on the performance and safety of the platoon. The results demonstrate an improvement in response time and safety using more vehicles information, validating the potential of cooperation to attenuate disturbances and improve traffic flow and safety.
Gaussian Process based Stochastic Model Predictive Control for Cooperative Adaptive Cruise Control
Nov 13, 2021
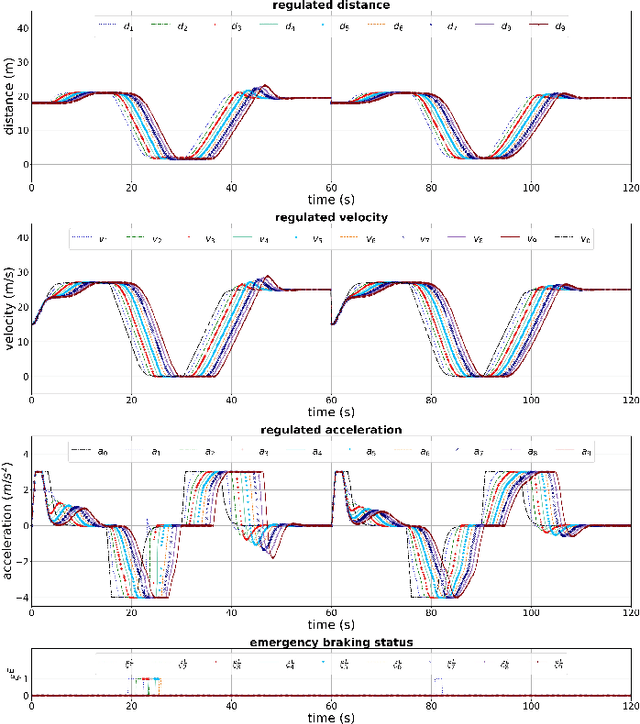

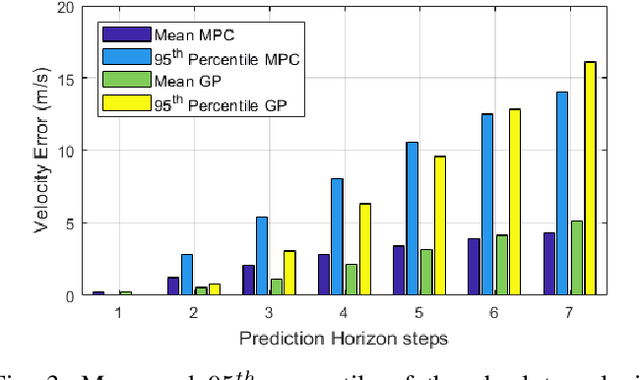
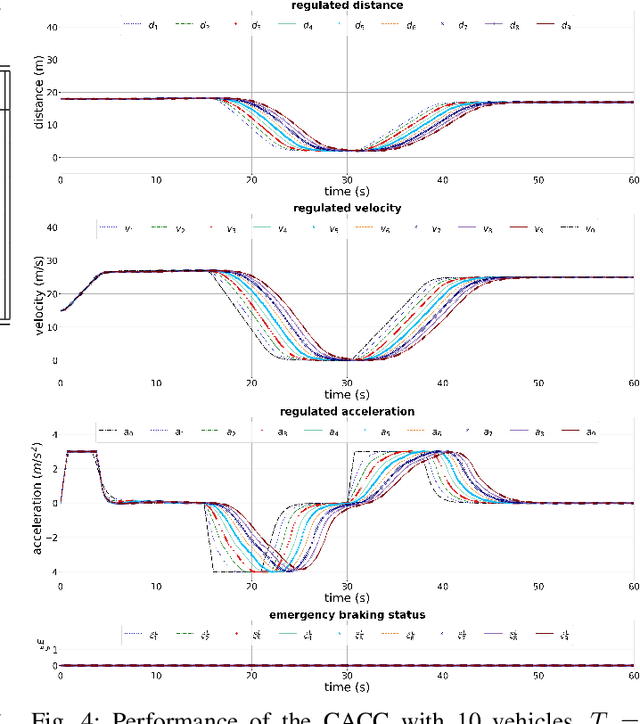
Cooperative driving relies on communication among vehicles to create situational awareness. One application of cooperative driving is Cooperative Adaptive Cruise Control (CACC) that aims at enhancing highway transportation safety and capacity. Model-based communication (MBC) is a new paradigm with a flexible content structure for broadcasting joint vehicle-driver predictive behavioral models. The vehicle's complex dynamics and diverse driving behaviors add complexity to the modeling process. Gaussian process (GP) is a fully data-driven and non-parametric Bayesian modeling approach which can be used as a modeling component of MBC. The knowledge about the uncertainty is propagated through predictions by generating local GPs for vehicles and broadcasting their hyper-parameters as a model to the neighboring vehicles. In this research study, GP is used to model each vehicle's speed trajectory, which allows vehicles to access the future behavior of their preceding vehicle during communication loss and/or low-rate communication. Besides, to overcome the safety issues in a vehicle platoon, two operating modes for each vehicle are considered; free following and emergency braking. This paper presents a discrete hybrid stochastic model predictive control, which incorporates system modes as well as uncertainties captured by GP models. The proposed control design approach finds the optimal vehicle speed trajectory with the goal of achieving a safe and efficient platoon of vehicles with small inter-vehicle gap while reducing the reliance of the vehicles on a frequent communication. Simulation studies demonstrate the efficacy of the proposed controller considering the aforementioned communication paradigm with low-rate intermittent communication.