 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWaveFormer: A 3D Transformer with Wavelet-Driven Feature Representation for Efficient Medical Image Segmentation
Apr 01, 2025Transformer-based architectures have advanced medical image analysis by effectively modeling long-range dependencies, yet they often struggle in 3D settings due to substantial memory overhead and insufficient capture of fine-grained local features. We address these limitations with WaveFormer, a novel 3D-transformer that: i) leverages the fundamental frequency-domain properties of features for contextual representation, and ii) is inspired by the top-down mechanism of the human visual recognition system, making it a biologically motivated architecture. By employing discrete wavelet transformations (DWT) at multiple scales, WaveFormer preserves both global context and high-frequency details while replacing heavy upsampling layers with efficient wavelet-based summarization and reconstruction. This significantly reduces the number of parameters, which is critical for real-world deployment where computational resources and training times are constrained. Furthermore, the model is generic and easily adaptable to diverse applications. Evaluations on BraTS2023, FLARE2021, and KiTS2023 demonstrate performance on par with state-of-the-art methods while offering substantially lower computational complexity.
Finite State Markov Modeling of C-V2X Erasure Links For Performance and Stability Analysis of Platooning Applications
Nov 13, 2021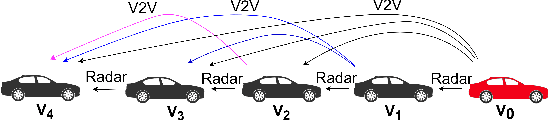
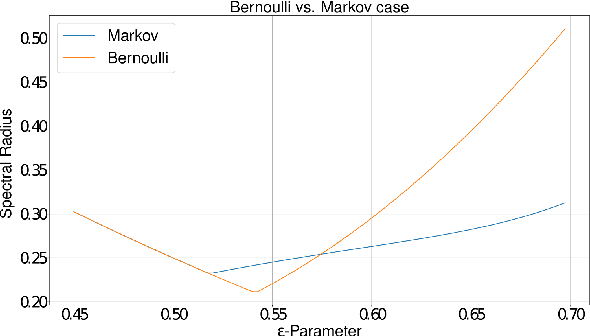
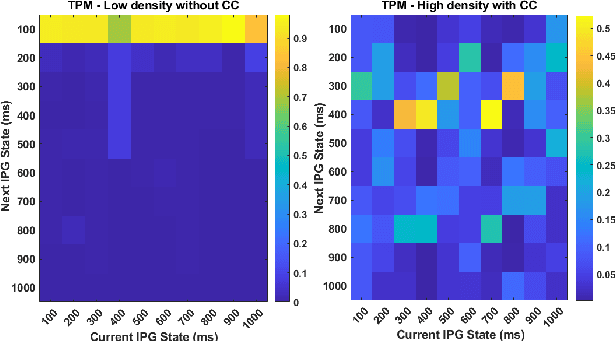

Cooperative driving systems, such as platooning, rely on communication and information exchange to create situational awareness for each agent. Design and performance of control components are therefore tightly coupled with communication component performance. The information flow between vehicles can significantly affect the dynamics of a platoon. Therefore, both the performance and the stability of a platoon depend not only on the vehicle's controller but also on the information flow Topology (IFT). The IFT can cause limitations for certain platoon properties, i.e., stability and scalability. Cellular Vehicle-To-Everything (C-V2X) has emerged as one of the main communication technologies to support connected and automated vehicle applications. As a result of packet loss, wireless channels create random link interruption and changes in network topologies. In this paper, we model the communication links between vehicles with a first-order Markov model to capture the prevalent time correlations for each link. These models enable performance evaluation through better approximation of communication links during system design stages. Our approach is to use data from experiments to model the Inter-Packet Gap (IPG) using Markov chains and derive transition probability matrices for consecutive IPG states. Training data is collected from high fidelity simulations using models derived based on empirical data for a variety of different vehicle densities and communication rates. Utilizing the IPG models, we analyze the mean-square stability of a platoon of vehicles with the standard consensus protocol tuned for ideal communication and compare the degradation in performance for different scenarios.
Controlling Steering Angle for Cooperative Self-driving Vehicles utilizing CNN and LSTM-based Deep Networks
May 12, 2019
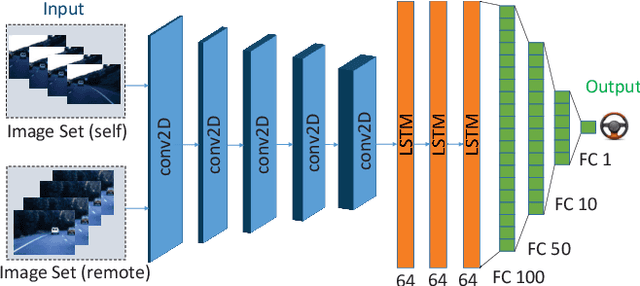

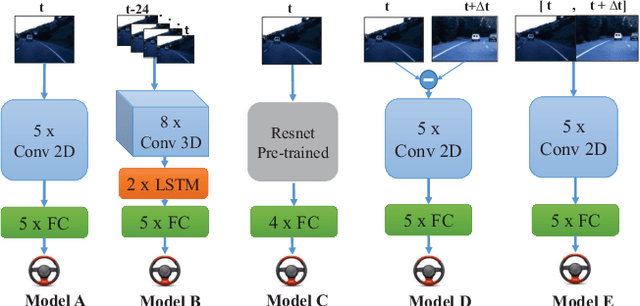
A fundamental challenge in autonomous vehicles is adjusting the steering angle at different road conditions. Recent state-of-the-art solutions addressing this challenge include deep learning techniques as they provide end-to-end solution to predict steering angles directly from the raw input images with higher accuracy. Most of these works ignore the temporal dependencies between the image frames. In this paper, we tackle the problem of utilizing multiple sets of images shared between two autonomous vehicles to improve the accuracy of controlling the steering angle by considering the temporal dependencies between the image frames. This problem has not been studied in the literature widely. We present and study a new deep architecture to predict the steering angle automatically by using Long-Short-Term-Memory (LSTM) in our deep architecture. Our deep architecture is an end-to-end network that utilizes CNN, LSTM and fully connected (FC) layers and it uses both present and futures images (shared by a vehicle ahead via Vehicle-to-Vehicle (V2V) communication) as input to control the steering angle. Our model demonstrates the lowest error when compared to the other existing approaches in the literature.