 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWell-Posed KL-Regularized Control via Wasserstein and Kalman-Wasserstein KL Divergences
Feb 02, 2026Kullback-Leibler divergence (KL) regularization is widely used in reinforcement learning, but it becomes infinite under support mismatch and can degenerate in low-noise limits. Utilizing a unified information-geometric framework, we introduce (Kalman)-Wasserstein-based KL analogues by replacing the Fisher-Rao geometry in the dynamical formulation of the KL with transport-based geometries, and we derive closed-form values for common distribution families. These divergences remain finite under support mismatch and yield a geometric interpretation of regularization heuristics used in Kalman ensemble methods. We demonstrate the utility of these divergences in KL-regularized optimal control. In the fully tractable setting of linear time-invariant systems with Gaussian process noise, the classical KL reduces to a quadratic control penalty that becomes singular as process noise vanishes. Our variants remove this singularity, yielding well-posed problems. On a double integrator and a cart-pole example, the resulting controls outperform KL-based regularization.
Convergence Properties of Natural Gradient Descent for Minimizing KL Divergence
Apr 27, 2025



The Kullback-Leibler (KL) divergence plays a central role in probabilistic machine learning, where it commonly serves as the canonical loss function. Optimization in such settings is often performed over the probability simplex, where the choice of parameterization significantly impacts convergence. In this work, we study the problem of minimizing the KL divergence and analyze the behavior of gradient-based optimization algorithms under two dual coordinate systems within the framework of information geometry$-$ the exponential family ($\theta$ coordinates) and the mixture family ($\eta$ coordinates). We compare Euclidean gradient descent (GD) in these coordinates with the coordinate-invariant natural gradient descent (NGD), where the natural gradient is a Riemannian gradient that incorporates the intrinsic geometry of the parameter space. In continuous time, we prove that the convergence rates of GD in the $\theta$ and $\eta$ coordinates provide lower and upper bounds, respectively, on the convergence rate of NGD. Moreover, under affine reparameterizations of the dual coordinates, the convergence rates of GD in $\eta$ and $\theta$ coordinates can be scaled to $2c$ and $\frac{2}{c}$, respectively, for any $c>0$, while NGD maintains a fixed convergence rate of $2$, remaining invariant to such transformations and sandwiched between them. Although this suggests that NGD may not exhibit uniformly superior convergence in continuous time, we demonstrate that its advantages become pronounced in discrete time, where it achieves faster convergence and greater robustness to noise, outperforming GD. Our analysis hinges on bounding the spectrum and condition number of the Hessian of the KL divergence at the optimum, which coincides with the Fisher information matrix.
Wasserstein KL-divergence for Gaussian distributions
Mar 31, 2025We introduce a new version of the KL-divergence for Gaussian distributions which is based on Wasserstein geometry and referred to as WKL-divergence. We show that this version is consistent with the geometry of the sample space ${\Bbb R}^n$. In particular, we can evaluate the WKL-divergence of the Dirac measures concentrated in two points which turns out to be proportional to the squared distance between these points.
Systematic construction of continuous-time neural networks for linear dynamical systems
Mar 24, 2024Discovering a suitable neural network architecture for modeling complex dynamical systems poses a formidable challenge, often involving extensive trial and error and navigation through a high-dimensional hyper-parameter space. In this paper, we discuss a systematic approach to constructing neural architectures for modeling a subclass of dynamical systems, namely, Linear Time-Invariant (LTI) systems. We use a variant of continuous-time neural networks in which the output of each neuron evolves continuously as a solution of a first-order or second-order Ordinary Differential Equation (ODE). Instead of deriving the network architecture and parameters from data, we propose a gradient-free algorithm to compute sparse architecture and network parameters directly from the given LTI system, leveraging its properties. We bring forth a novel neural architecture paradigm featuring horizontal hidden layers and provide insights into why employing conventional neural architectures with vertical hidden layers may not be favorable. We also provide an upper bound on the numerical errors of our neural networks. Finally, we demonstrate the high accuracy of our constructed networks on three numerical examples.
Finite State Markov Modeling of C-V2X Erasure Links For Performance and Stability Analysis of Platooning Applications
Nov 13, 2021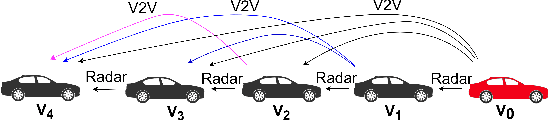
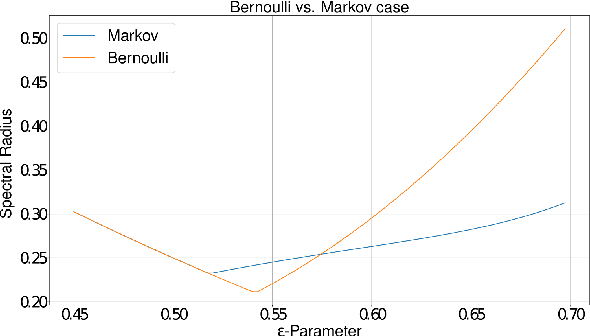
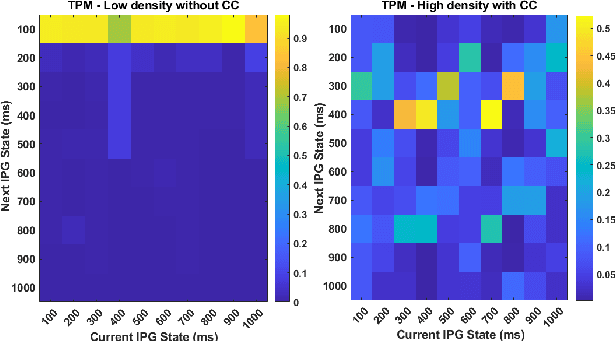

Cooperative driving systems, such as platooning, rely on communication and information exchange to create situational awareness for each agent. Design and performance of control components are therefore tightly coupled with communication component performance. The information flow between vehicles can significantly affect the dynamics of a platoon. Therefore, both the performance and the stability of a platoon depend not only on the vehicle's controller but also on the information flow Topology (IFT). The IFT can cause limitations for certain platoon properties, i.e., stability and scalability. Cellular Vehicle-To-Everything (C-V2X) has emerged as one of the main communication technologies to support connected and automated vehicle applications. As a result of packet loss, wireless channels create random link interruption and changes in network topologies. In this paper, we model the communication links between vehicles with a first-order Markov model to capture the prevalent time correlations for each link. These models enable performance evaluation through better approximation of communication links during system design stages. Our approach is to use data from experiments to model the Inter-Packet Gap (IPG) using Markov chains and derive transition probability matrices for consecutive IPG states. Training data is collected from high fidelity simulations using models derived based on empirical data for a variety of different vehicle densities and communication rates. Utilizing the IPG models, we analyze the mean-square stability of a platoon of vehicles with the standard consensus protocol tuned for ideal communication and compare the degradation in performance for different scenarios.