 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRK-MPC: Residual Koopman Model Predictive Control for Quadruped Locomotion in Offroad Environments
Apr 05, 2026This paper presents Residual Koopman MPC (RK-MPC), a Koopman-based, data-driven model predictive control framework for quadruped locomotion that improves prediction fidelity while preserving real-time tractability. RK-MPC augments a nominal template model with a compact linear residual predictor learned from data in lifted coordinates, enabling systematic correction of model mismatch induced by contact variability and terrain disturbances with provable bounds on multi-step prediction error. The learned residual model is embedded within a convex quadratic-program MPC formulation, yielding a receding-horizon controller that runs onboard at 500 Hz and retains the structure and constraint-handling advantages of optimization-based control. We evaluate RK-MPC in both Gazebo simulation and Unitree Go1 hardware experiments, demonstrating reliable blind locomotion across contact disturbances, multiple gait schedules, and challenging off-road terrains including grass, gravel, snow, and ice. We further compare against Koopman/EDMD baselines using alternative observable dictionaries, including monomial and $SE(3)$-structured bases, and show that the residual correction improves multi-step prediction and closed-loop performance while reducing sensitivity to the choice of observables. Overall, RK-MPC provides a practical, hardware-validated pathway for data-driven predictive control of quadrupeds in unstructured environments. See https://sriram-2502.github.io/rk-mpc for implementation videos.
Kernel Methods for Stochastic Dynamical Systems with Application to Koopman Eigenfunctions: Feynman-Kac Representations and RKHS Approximation
Mar 01, 2026We extend the unified kernel framework for transport equations and Koopman eigenfunctions, developed in previous work by the authors for deterministic systems, to stochastic differential equations (SDEs). In the deterministic setting, three analytically grounded constructions-Lions-type variational principles, Green's function convolution, and resolvent operators along characteristic flows--were shown to yield identical reproducing kernels. For stochastic systems, the Koopman generator includes a second-order diffusion term, transforming the first-order hyperbolic transport equation into a second-order elliptic-parabolic PDE. This fundamental change necessitates replacing the method of characteristics with probabilistic representations based on the Feynman--Kac formula. Our main contributions include: (i) extension of all three kernel constructions to stochastic systems via Feynman--Kac path-integral representations; (ii) proof of kernel equivalence under uniform ellipticity assumptions; (iii) a collocation-based computational framework incorporating second-order differential operators; (iv) error bounds separating RKHS approximation error from Monte Carlo sampling error; (v) analysis of how diffusion affects numerical conditioning; and (vi) connections to generator EDMD, diffusion maps, and kernel analog forecasting. Numerical experiments on Ornstein--Uhlenbeck processes, nonlinear SDEs with varying diffusion strength, and multi-dimensional systems validate the theoretical developments and demonstrate that moderate diffusion can improve numerical stability through elliptic regularization.
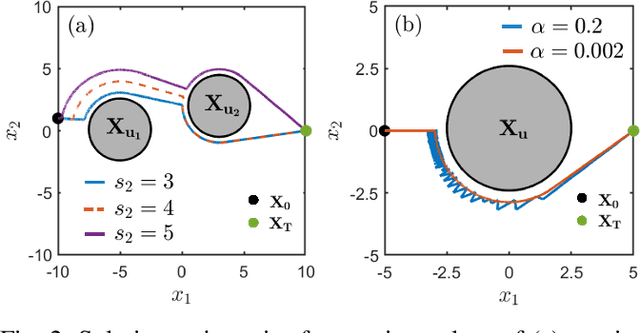
Safety Critical Model Predictive Control Using Discrete-Time Control Density Functions
Sep 16, 2025This paper presents MPC-CDF, a new approach integrating control density functions (CDFs) within a model predictive control (MPC) framework to ensure safety-critical control in nonlinear dynamical systems. By using the dual formulation of the navigation problem, we incorporate CDFs into the MPC framework, ensuring both convergence and safety in a discrete-time setting. These density functions are endowed with a physical interpretation, where the associated measure signifies the occupancy of system trajectories. Leveraging this occupancy-based perspective, we synthesize safety-critical controllers using the proposed MPC-CDF framework. We illustrate the safety properties of this framework using a unicycle model and compare it with a control barrier function-based method. The efficacy of this approach is demonstrated in the autonomous safe navigation of an underwater vehicle, which avoids complex and arbitrary obstacles while achieving the desired level of safety.
Kernel Methods for the Approximation of the Eigenfunctions of the Koopman Operator
Dec 21, 2024



The Koopman operator provides a linear framework to study nonlinear dynamical systems. Its spectra offer valuable insights into system dynamics, but the operator can exhibit both discrete and continuous spectra, complicating direct computations. In this paper, we introduce a kernel-based method to construct the principal eigenfunctions of the Koopman operator without explicitly computing the operator itself. These principal eigenfunctions are associated with the equilibrium dynamics, and their eigenvalues match those of the linearization of the nonlinear system at the equilibrium point. We exploit the structure of the principal eigenfunctions by decomposing them into linear and nonlinear components. The linear part corresponds to the left eigenvector of the system's linearization at the equilibrium, while the nonlinear part is obtained by solving a partial differential equation (PDE) using kernel methods. Our approach avoids common issues such as spectral pollution and spurious eigenvalues, which can arise in previous methods. We demonstrate the effectiveness of our algorithm through numerical examples.
Safe Navigation in Dynamic Environments using Density Functions
Nov 19, 2024



This work uses density functions for safe navigation in dynamic environments. The dynamic environment consists of time-varying obstacles as well as time-varying target sets. We propose an analytical construction of time-varying density functions to solve these navigation problems. The proposed approach leads to a time-varying feedback controller obtained as a positive gradient of the density function. This paper's main contribution is providing convergence proof using the analytically constructed density function for safe navigation in the presence of a dynamic obstacle set and time-varying target set. The results are the first of this kind developed for a system with integrator dynamics and open up the possibility for application to systems with more complex dynamics using methods based on control density function and inverse kinematic-based control design. We present the application of the developed approach for collision avoidance in multi-agent systems and robotic systems. While the theoretical results are produced for first-order integrator systems, we demonstrate how the framework can be applied for systems with non-trivial dynamics, such as Dubin's car model and fully actuated Euler-Lagrange system with robotics applications.
Digital Twins Meet the Koopman Operator: Data-Driven Learning for Robust Autonomy
Sep 16, 2024



Contrary to on-road autonomous navigation, off-road autonomy is complicated by various factors ranging from sensing challenges to terrain variability. In such a milieu, data-driven approaches have been commonly employed to capture intricate vehicle-environment interactions effectively. However, the success of data-driven methods depends crucially on the quality and quantity of data, which can be compromised by large variability in off-road environments. To address these concerns, we present a novel workflow to recreate the exact vehicle and its target operating conditions digitally for domain-specific data generation. This enables us to effectively model off-road vehicle dynamics from simulation data using the Koopman operator theory, and employ the obtained models for local motion planning and optimal vehicle control. The capabilities of the proposed methodology are demonstrated through an autonomous navigation problem of a 1:5 scale vehicle, where a terrain-informed planner is employed for global mission planning. Results indicate a substantial improvement in off-road navigation performance with the proposed algorithm (5.84x) and underscore the efficacy of digital twinning in terms of improving the sample efficiency (3.2x) and reducing the sim2real gap (5.2%).
Safe Motion Planning for Quadruped Robots Using Density Functions
Dec 14, 2023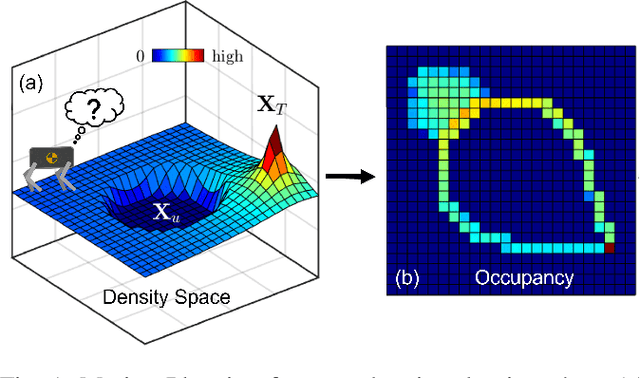
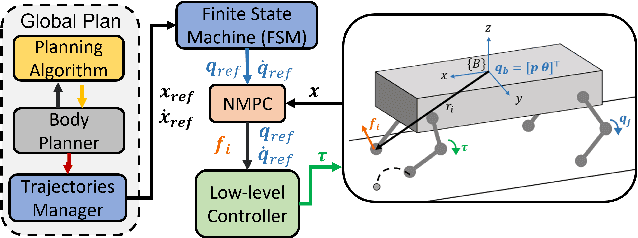
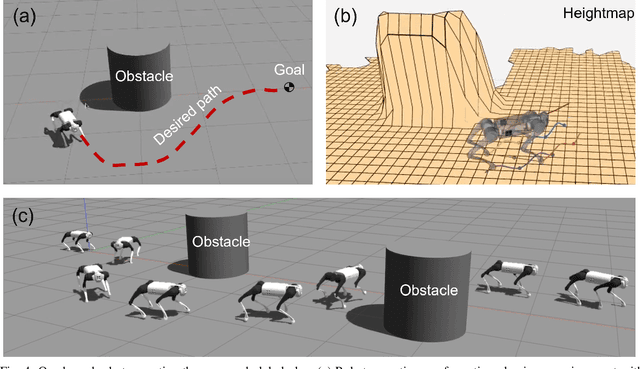
This paper presents a motion planning algorithm for quadruped locomotion based on density functions. We decompose the locomotion problem into a high-level density planner and a model predictive controller (MPC). Due to density functions having a physical interpretation through the notion of occupancy, it is intuitive to represent the environment with safety constraints. Hence, there is an ease of use to constructing the planning problem with density. The proposed method uses a simplified model of the robot into an integrator system, where the high-level plan is in a feedback form formulated through an analytically constructed density function. We then use the MPC to optimize the reference trajectory, in which a low-level PID controller is used to obtain the torque level control. The overall framework is implemented in simulation, demonstrating our feedback density planner for legged locomotion. The implementation of work is available at \url{https://github.com/AndrewZheng-1011/legged_planner}
Safety using Analytically Constructed Density Functions
Jun 27, 2023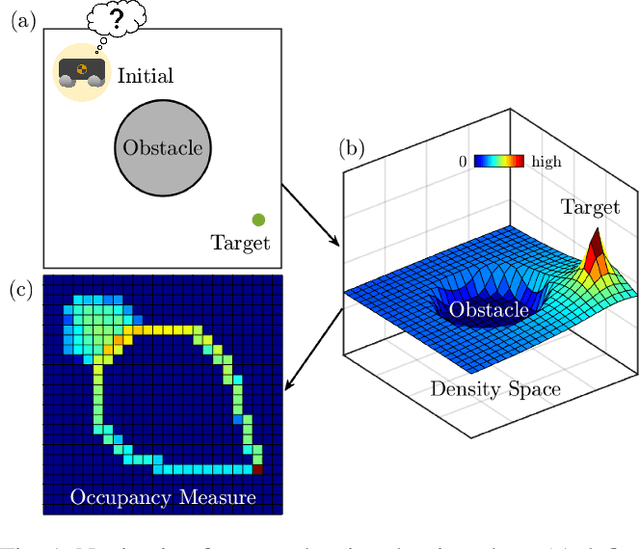
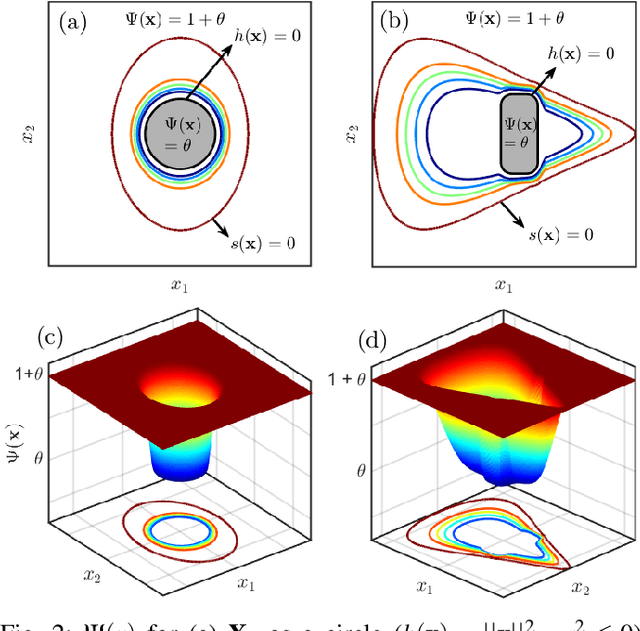
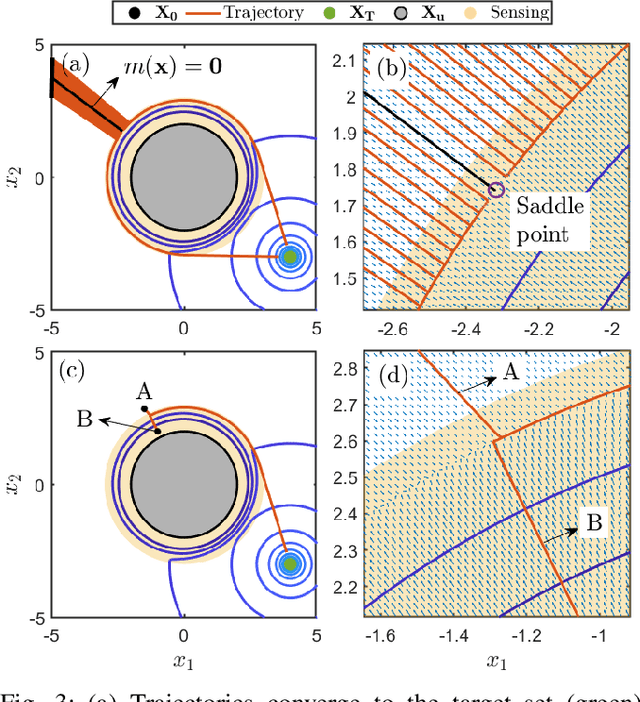
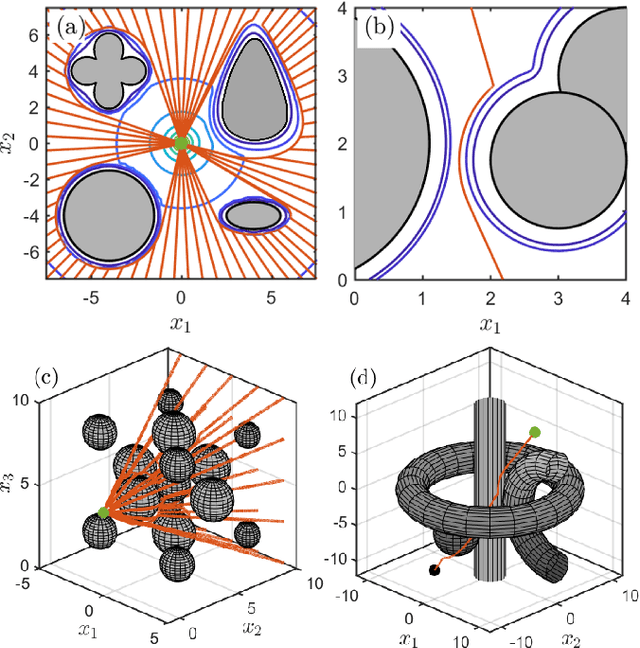
This paper presents a novel approach for safe control synthesis using the dual formulation of the navigation problem. The main contribution of this paper is in the analytical construction of density functions for almost everywhere navigation with safety constraints. In contrast to the existing approaches, where density functions are used for the analysis of navigation problems, we use density functions for the synthesis of safe controllers. We provide convergence proof using the proposed density functions for navigation with safety. Further, we use these density functions to design feedback controllers capable of navigating in cluttered environments and high-dimensional configuration spaces. The proposed analytical construction of density functions overcomes the problem associated with navigation functions, which are known to exist but challenging to construct, and potential functions, which suffer from local minima. Application of the developed framework is demonstrated on simple integrator dynamics and fully actuated robotic systems.
SE Koopman-MPC: Data-driven Learning and Control of Quadrotor UAVs
May 05, 2023



In this paper, we propose a novel data-driven approach for learning and control of quadrotor UAVs based on the Koopman operator and extended dynamic mode decomposition (EDMD). Building observables for EDMD based on conventional methods like Euler angles or quaternions to represent orientation is known to involve singularities. To address this issue, we employ a set of physics-informed observables based on the underlying topology of the nonlinear system. We use rotation matrices to directly represent the orientation dynamics and obtain a lifted linear representation of the nonlinear quadrotor dynamics in the SE(3) manifold. This EDMD model leads to accurate prediction and can generalize to several validation sets. Further, we design a linear model predictive controller (MPC) based on the proposed EDMD model to track agile reference trajectories. Simulation results show that the proposed MPC controller can run as fast as 100 Hz and is able to track arbitrary reference trajectories with good accuracy. Implementation details can be found in \url{https://github.com/sriram-2502/KoopmanMPC_Quadrotor}
Off-Road Navigation of Legged Robots Using Linear Transfer Operators
May 04, 2023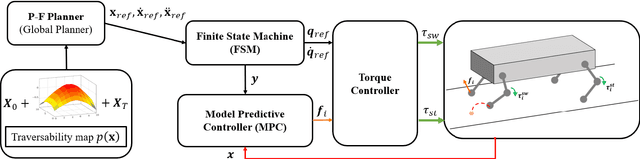
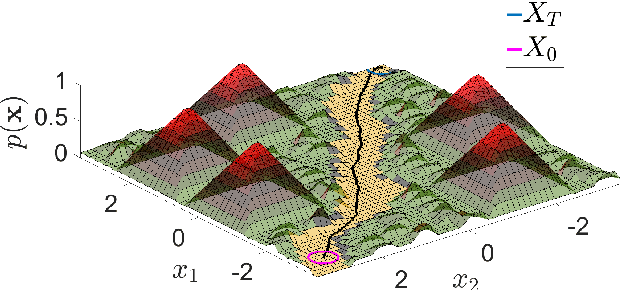
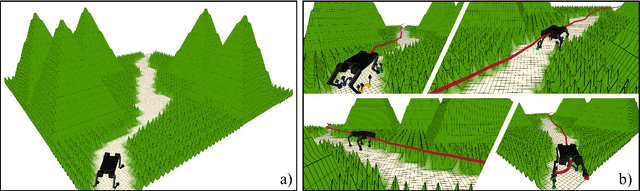
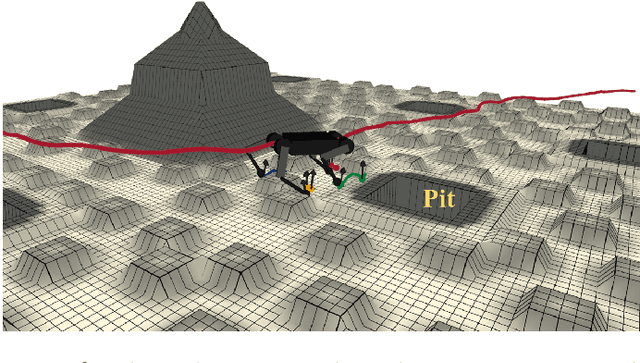
This paper presents the implementation of off-road navigation on legged robots using convex optimization through linear transfer operators. Given a traversability measure that captures the off-road environment, we lift the navigation problem into the density space using the Perron-Frobenius (P-F) operator. This allows the problem formulation to be represented as a convex optimization. Due to the operator acting on an infinite-dimensional density space, we use data collected from the terrain to get a finite-dimension approximation of the convex optimization. Results of the optimal trajectory for off-road navigation are compared with a standard iterative planner, where we show how our convex optimization generates a more traversable path for the legged robot compared to the suboptimal iterative planner.