 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKernel Methods for Stochastic Dynamical Systems with Application to Koopman Eigenfunctions: Feynman-Kac Representations and RKHS Approximation
Mar 01, 2026We extend the unified kernel framework for transport equations and Koopman eigenfunctions, developed in previous work by the authors for deterministic systems, to stochastic differential equations (SDEs). In the deterministic setting, three analytically grounded constructions-Lions-type variational principles, Green's function convolution, and resolvent operators along characteristic flows--were shown to yield identical reproducing kernels. For stochastic systems, the Koopman generator includes a second-order diffusion term, transforming the first-order hyperbolic transport equation into a second-order elliptic-parabolic PDE. This fundamental change necessitates replacing the method of characteristics with probabilistic representations based on the Feynman--Kac formula. Our main contributions include: (i) extension of all three kernel constructions to stochastic systems via Feynman--Kac path-integral representations; (ii) proof of kernel equivalence under uniform ellipticity assumptions; (iii) a collocation-based computational framework incorporating second-order differential operators; (iv) error bounds separating RKHS approximation error from Monte Carlo sampling error; (v) analysis of how diffusion affects numerical conditioning; and (vi) connections to generator EDMD, diffusion maps, and kernel analog forecasting. Numerical experiments on Ornstein--Uhlenbeck processes, nonlinear SDEs with varying diffusion strength, and multi-dimensional systems validate the theoretical developments and demonstrate that moderate diffusion can improve numerical stability through elliptic regularization.
KROM: Kernelized Reduced Order Modeling
Feb 27, 2026We propose KROM, a kernel-based reduced-order framework for fast solution of nonlinear partial differential equations. KROM formulates PDE solution as a minimum-norm (Gaussian-process) recovery problem in an RKHS, and accelerates the resulting kernel solves by sparsifying the precision matrix via sparse Cholesky factorization. A central ingredient is an empirical kernel constructed from a snapshot library of PDE solutions (generated under varying forcings, initial data, boundary data, or parameters). This snapshot-driven kernel adapts to problem-specific structure -- boundary behavior, oscillations, nonsmooth features, linear constraints, conservation and dissipation laws -- thereby reducing the dependence on hand-tuned stationary kernels. The resulting method yields an implicit reduced model: after sparsification, only a localized subset of effective degrees of freedom is used online. We report numerical results for semilinear elliptic equations, discontinuous-coefficient Darcy flow, viscous Burgers, Allen--Cahn, and two-dimensional Navier--Stokes, showing that empirical kernels can match or outperform Matérn baselines, especially in nonsmooth regimes. We also provide error bounds that separate discretization effects, snapshot-space approximation error, and sparse-Cholesky approximation error.
Fluids You Can Trust: Property-Preserving Operator Learning for Incompressible Flows
Feb 17, 2026We present a novel property-preserving kernel-based operator learning method for incompressible flows governed by the incompressible Navier-Stokes equations. Traditional numerical solvers incur significant computational costs to respect incompressibility. Operator learning offers efficient surrogate models, but current neural operators fail to exactly enforce physical properties such as incompressibility, periodicity, and turbulence. Our method maps input functions to expansion coefficients of output functions in a property-preserving kernel basis, ensuring that predicted velocity fields analytically and simultaneously preserve the aforementioned physical properties. We evaluate the method on challenging 2D and 3D, laminar and turbulent, incompressible flow problems. Our method achieves up to six orders of magnitude lower relative $\ell_2$ errors upon generalization and trains up to five orders of magnitude faster compared to neural operators. Moreover, while our method enforces incompressibility analytically, neural operators exhibit very large deviations. Our results show that our method provides an accurate and efficient surrogate for incompressible flows.
Solving Functional PDEs with Gaussian Processes and Applications to Functional Renormalization Group Equations
Dec 24, 2025We present an operator learning framework for solving non-perturbative functional renormalization group equations, which are integro-differential equations defined on functionals. Our proposed approach uses Gaussian process operator learning to construct a flexible functional representation formulated directly on function space, making it independent of a particular equation or discretization. Our method is flexible, and can apply to a broad range of functional differential equations while still allowing for the incorporation of physical priors in either the prior mean or the kernel design. We demonstrate the performance of our method on several relevant equations, such as the Wetterich and Wilson--Polchinski equations, showing that it achieves equal or better performance than existing approximations such as the local-potential approximation, while being significantly more flexible. In particular, our method can handle non-constant fields, making it promising for the study of more complex field configurations, such as instantons.
Data-Efficient Kernel Methods for Learning Differential Equations and Their Solution Operators: Algorithms and Error Analysis
Mar 02, 2025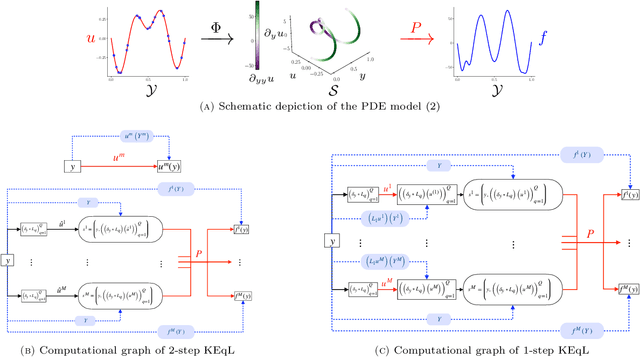



We introduce a novel kernel-based framework for learning differential equations and their solution maps that is efficient in data requirements, in terms of solution examples and amount of measurements from each example, and computational cost, in terms of training procedures. Our approach is mathematically interpretable and backed by rigorous theoretical guarantees in the form of quantitative worst-case error bounds for the learned equation. Numerical benchmarks demonstrate significant improvements in computational complexity and robustness while achieving one to two orders of magnitude improvements in terms of accuracy compared to state-of-the-art algorithms.
Solving Roughly Forced Nonlinear PDEs via Misspecified Kernel Methods and Neural Networks
Jan 29, 2025We consider the use of Gaussian Processes (GPs) or Neural Networks (NNs) to numerically approximate the solutions to nonlinear partial differential equations (PDEs) with rough forcing or source terms, which commonly arise as pathwise solutions to stochastic PDEs. Kernel methods have recently been generalized to solve nonlinear PDEs by approximating their solutions as the maximum a posteriori estimator of GPs that are conditioned to satisfy the PDE at a finite set of collocation points. The convergence and error guarantees of these methods, however, rely on the PDE being defined in a classical sense and its solution possessing sufficient regularity to belong to the associated reproducing kernel Hilbert space. We propose a generalization of these methods to handle roughly forced nonlinear PDEs while preserving convergence guarantees with an oversmoothing GP kernel that is misspecified relative to the true solution's regularity. This is achieved by conditioning a regular GP to satisfy the PDE with a modified source term in a weak sense (when integrated against a finite number of test functions). This is equivalent to replacing the empirical $L^2$-loss on the PDE constraint by an empirical negative-Sobolev norm. We further show that this loss function can be used to extend physics-informed neural networks (PINNs) to stochastic equations, thereby resulting in a new NN-based variant termed Negative Sobolev Norm-PINN (NeS-PINN).
Kernel Methods for the Approximation of the Eigenfunctions of the Koopman Operator
Dec 21, 2024



The Koopman operator provides a linear framework to study nonlinear dynamical systems. Its spectra offer valuable insights into system dynamics, but the operator can exhibit both discrete and continuous spectra, complicating direct computations. In this paper, we introduce a kernel-based method to construct the principal eigenfunctions of the Koopman operator without explicitly computing the operator itself. These principal eigenfunctions are associated with the equilibrium dynamics, and their eigenvalues match those of the linearization of the nonlinear system at the equilibrium point. We exploit the structure of the principal eigenfunctions by decomposing them into linear and nonlinear components. The linear part corresponds to the left eigenvector of the system's linearization at the equilibrium, while the nonlinear part is obtained by solving a partial differential equation (PDE) using kernel methods. Our approach avoids common issues such as spectral pollution and spurious eigenvalues, which can arise in previous methods. We demonstrate the effectiveness of our algorithm through numerical examples.
Toward Efficient Kernel-Based Solvers for Nonlinear PDEs
Oct 15, 2024This paper introduces a novel kernel learning framework toward efficiently solving nonlinear partial differential equations (PDEs). In contrast to the state-of-the-art kernel solver that embeds differential operators within kernels, posing challenges with a large number of collocation points, our approach eliminates these operators from the kernel. We model the solution using a standard kernel interpolation form and differentiate the interpolant to compute the derivatives. Our framework obviates the need for complex Gram matrix construction between solutions and their derivatives, allowing for a straightforward implementation and scalable computation. As an instance, we allocate the collocation points on a grid and adopt a product kernel, which yields a Kronecker product structure in the interpolation. This structure enables us to avoid computing the full Gram matrix, reducing costs and scaling efficiently to a large number of collocation points. We provide a proof of the convergence and rate analysis of our method under appropriate regularity assumptions. In numerical experiments, we demonstrate the advantages of our method in solving several benchmark PDEs.
Model aggregation: minimizing empirical variance outperforms minimizing empirical error
Sep 25, 2024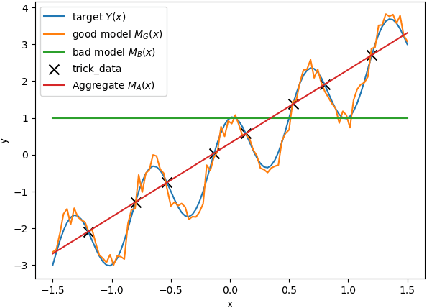
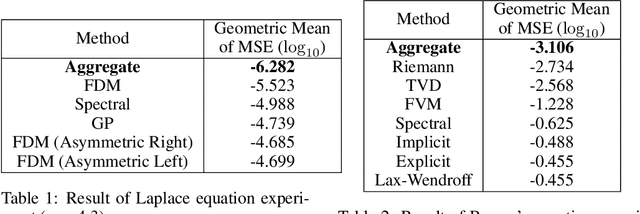
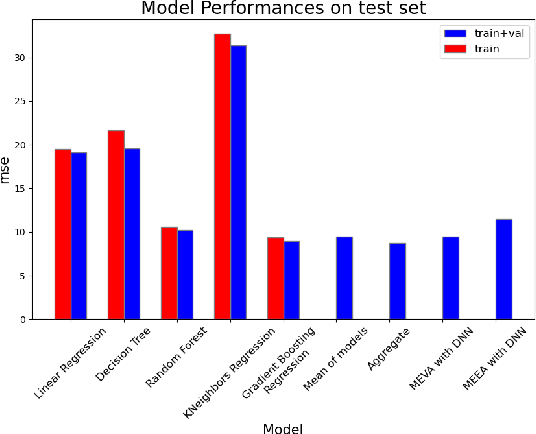
Whether deterministic or stochastic, models can be viewed as functions designed to approximate a specific quantity of interest. We propose a data-driven framework that aggregates predictions from diverse models into a single, more accurate output. This aggregation approach exploits each model's strengths to enhance overall accuracy. It is non-intrusive - treating models as black-box functions - model-agnostic, requires minimal assumptions, and can combine outputs from a wide range of models, including those from machine learning and numerical solvers. We argue that the aggregation process should be point-wise linear and propose two methods to find an optimal aggregate: Minimal Error Aggregation (MEA), which minimizes the aggregate's prediction error, and Minimal Variance Aggregation (MVA), which minimizes its variance. While MEA is inherently more accurate when correlations between models and the target quantity are perfectly known, Minimal Empirical Variance Aggregation (MEVA), an empirical version of MVA - consistently outperforms Minimal Empirical Error Aggregation (MEEA), the empirical counterpart of MEA, when these correlations must be estimated from data. The key difference is that MEVA constructs an aggregate by estimating model errors, while MEEA treats the models as features for direct interpolation of the quantity of interest. This makes MEEA more susceptible to overfitting and poor generalization, where the aggregate may underperform individual models during testing. We demonstrate the versatility and effectiveness of our framework in various applications, such as data science and partial differential equations, showing how it successfully integrates traditional solvers with machine learning models to improve both robustness and accuracy.
Operator Learning with Gaussian Processes
Sep 06, 2024


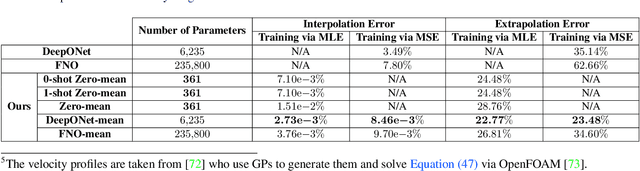
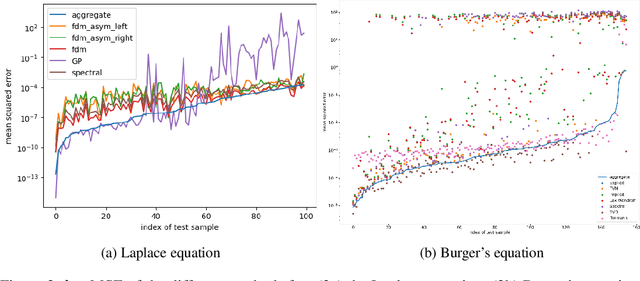
Operator learning focuses on approximating mappings $\mathcal{G}^\dagger:\mathcal{U} \rightarrow\mathcal{V}$ between infinite-dimensional spaces of functions, such as $u: \Omega_u\rightarrow\mathbb{R}$ and $v: \Omega_v\rightarrow\mathbb{R}$. This makes it particularly suitable for solving parametric nonlinear partial differential equations (PDEs). While most machine learning methods for operator learning rely on variants of deep neural networks (NNs), recent studies have shown that Gaussian Processes (GPs) are also competitive while offering interpretability and theoretical guarantees. In this paper, we introduce a hybrid GP/NN-based framework for operator learning that leverages the strengths of both methods. Instead of approximating the function-valued operator $\mathcal{G}^\dagger$, we use a GP to approximate its associated real-valued bilinear form $\widetilde{\mathcal{G}}^\dagger: \mathcal{U}\times\mathcal{V}^*\rightarrow\mathbb{R}.$ This bilinear form is defined by $\widetilde{\mathcal{G}}^\dagger(u,\varphi) := [\varphi,\mathcal{G}^\dagger(u)],$ which allows us to recover the operator $\mathcal{G}^\dagger$ through $\mathcal{G}^\dagger(u)(y)=\widetilde{\mathcal{G}}^\dagger(u,\delta_y).$ The GP mean function can be zero or parameterized by a neural operator and for each setting we develop a robust training mechanism based on maximum likelihood estimation (MLE) that can optionally leverage the physics involved. Numerical benchmarks show that (1) it improves the performance of a base neural operator by using it as the mean function of a GP, and (2) it enables zero-shot data-driven models for accurate predictions without prior training. Our framework also handles multi-output operators where $\mathcal{G}^\dagger:\mathcal{U} \rightarrow\prod_{s=1}^S\mathcal{V}^s$, and benefits from computational speed-ups via product kernel structures and Kronecker product matrix representations.