 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Learning of Koopman Representation for Control
Oct 15, 2020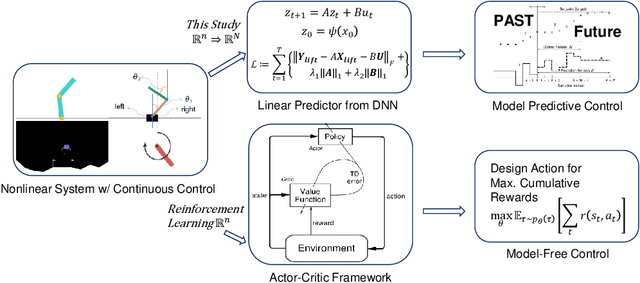
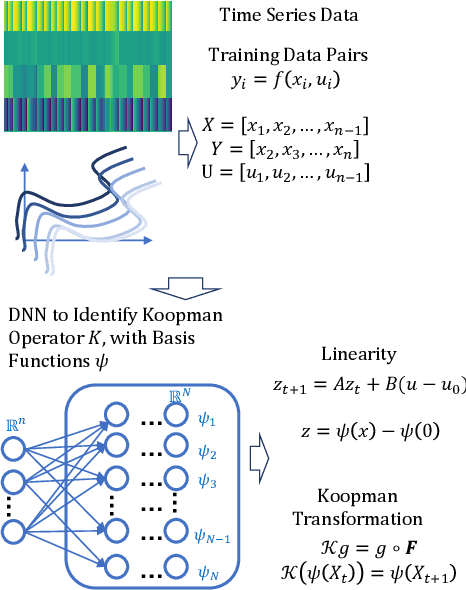

We develop a data-driven, model-free approach for the optimal control of the dynamical system. The proposed approach relies on the Deep Neural Network (DNN) based learning of Koopman operator for the purpose of control. In particular, DNN is employed for the data-driven identification of basis function used in the linear lifting of nonlinear control system dynamics. The controller synthesis is purely data-driven and does not rely on a priori domain knowledge. The OpenAI Gym environment, employed for Reinforcement Learning-based control design, is used for data generation and learning of Koopman operator in control setting. The method is applied to two classic dynamical systems on OpenAI Gym environment to demonstrate the capability.
Cell A* for Navigation of Unmanned Aerial Vehicles in Partially-known Environments
Sep 16, 2020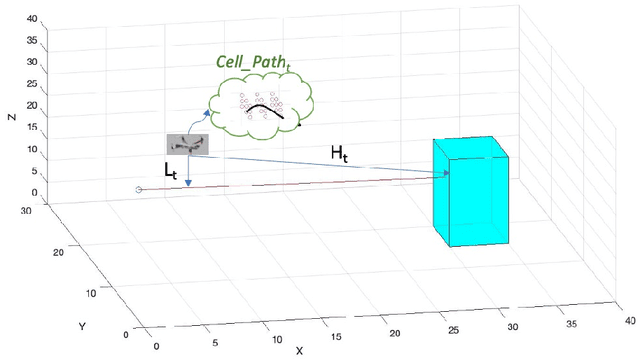


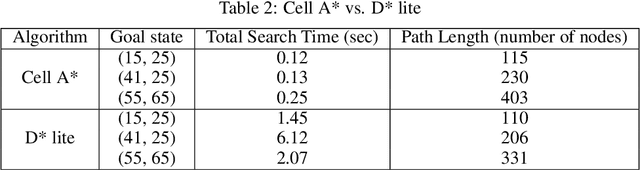
Proper path planning is the first step of robust and efficient autonomous navigation for mobile robots. Meanwhile, it is still challenging for robots to work in a complex environment without complete prior information. This paper presents an extension to the A* search algorithm and its variants to make the path planning stable with less computational burden while handling long-distance tasks. The implemented algorithm is capable of online searching for a collision-free and smooth path when heading to the defined goal position. This paper deploys the algorithm on the autonomous drone platform and implements it on a remote control car for algorithm efficiency validation.
Data Driven Control with Learned Dynamics: Model-Based versus Model-Free Approach
Jun 16, 2020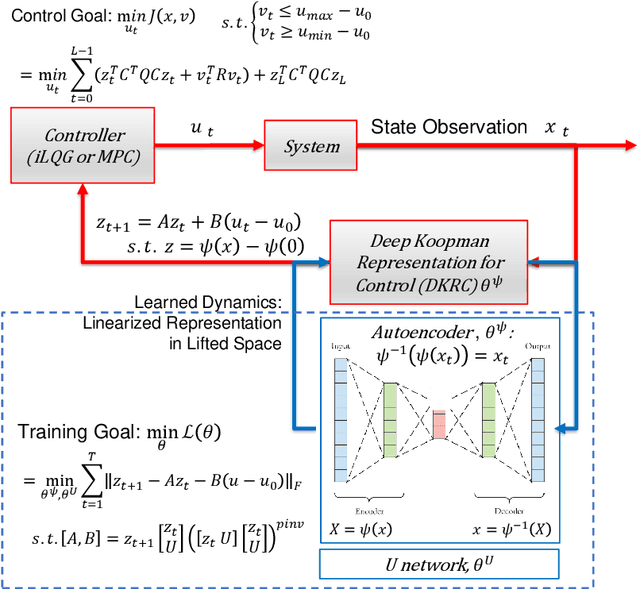
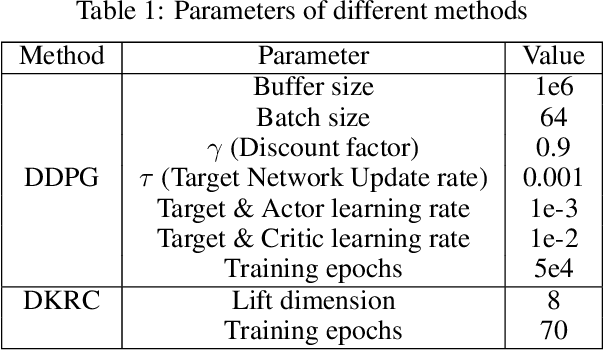
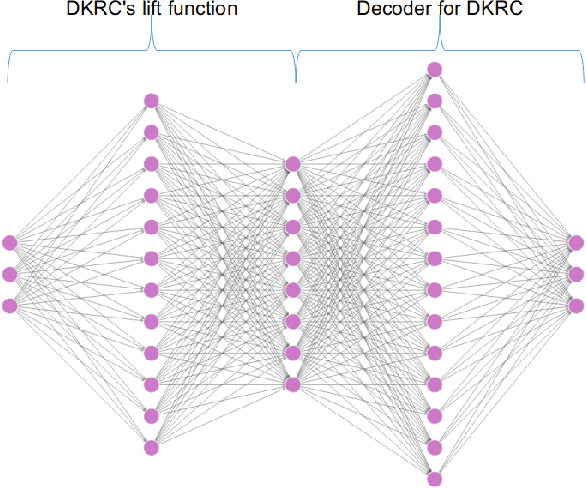
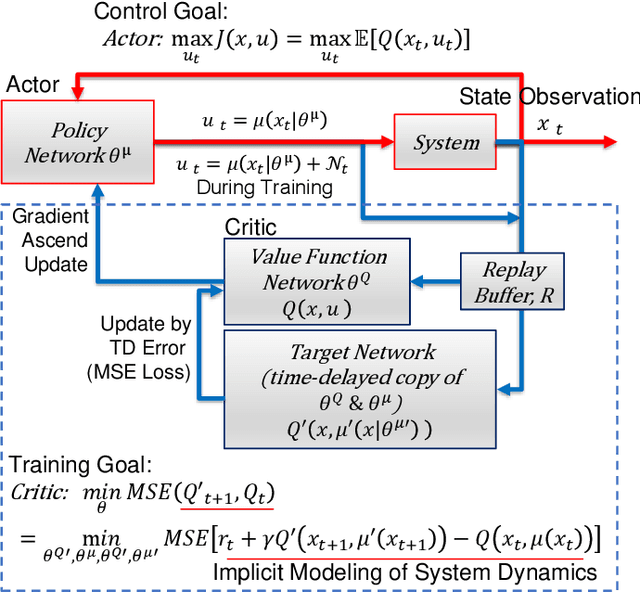
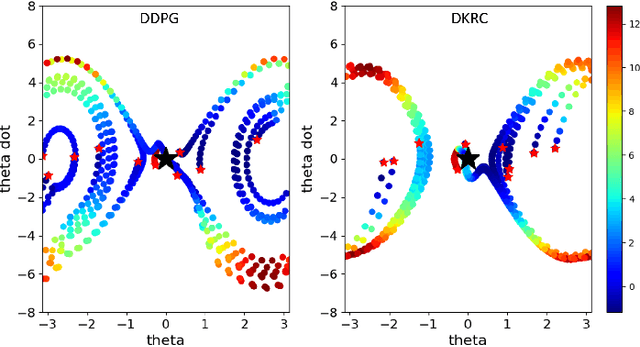
This paper compares two different types of data-driven control methods, representing model-based and model-free approaches. One is a recently proposed method - Deep Koopman Representation for Control (DKRC), which utilizes a deep neural network to map an unknown nonlinear dynamical system to a high-dimensional linear system, which allows for employing state-of-the-art control strategy. The other one is a classic model-free control method based on an actor-critic architecture - Deep Deterministic Policy Gradient (DDPG), which has been proved to be effective in various dynamical systems. The comparison is carried out in OpenAI Gym, which provides multiple control environments for benchmark purposes. Two examples are provided for comparison, i.e., classic Inverted Pendulum and Lunar Lander Continuous Control. From the results of the experiments, we compare these two methods in terms of control strategies and the effectiveness under various initialization conditions. We also examine the learned dynamic model from DKRC with the analytical model derived from the Euler-Lagrange Linearization method, which demonstrates the accuracy in the learned model for unknown dynamics from a data-driven sample-efficient approach.
Automated Testing for Deep Learning Systems with Differential Behavior Criteria
Dec 31, 2019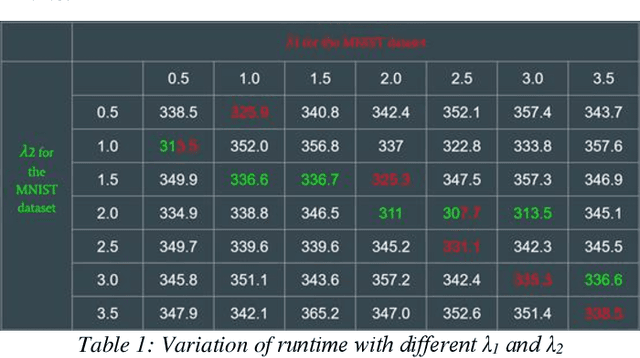

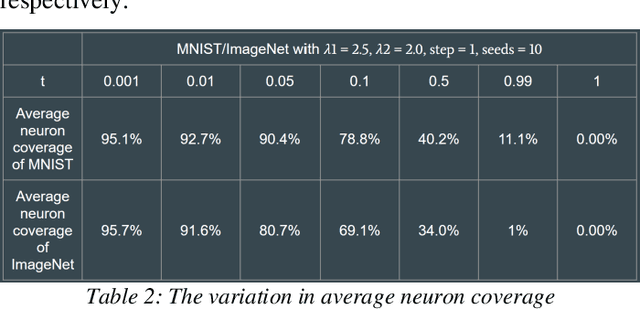
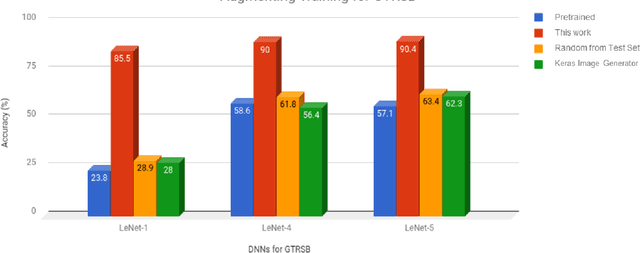
In this work, we conducted a study on building an automated testing system for deep learning systems based on differential behavior criteria. The automated testing goals were achieved by jointly optimizing two objective functions: maximizing differential behaviors from models under testing and maximizing neuron coverage. By observing differential behaviors from three pre-trained models during each testing iteration, the input image that triggered erroneous feedback was registered as a corner-case. The generated corner-cases can be used to examine the robustness of DNNs and consequently improve model accuracy. A project called DeepXplore was also used as a baseline model. After we fully implemented and optimized the baseline system, we explored its application as an augmenting training dataset with newly generated corner cases. With the GTRSB dataset, by retraining the model based on automated generated corner cases, the accuracy of three generic models increased by 259.2%, 53.6%, and 58.3%, respectively. Further, to extend the capability of automated testing, we explored other approaches based on differential behavior criteria to generate photo-realistic images for deep learning systems. One approach was to apply various transformations to the seed images for the deep learning framework. The other approach was to utilize the Generative Adversarial Networks (GAN) technique, which was implemented on MNIST and Driving datasets. The style transferring capability has been observed very effective in adding additional visual effects, replacing image elements, and style-shifting (virtual image to real images). The GAN-based testing sample generation system was shown to be the next frontier for automated testing for deep learning systems.