Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCell A* for Navigation of Unmanned Aerial Vehicles in Partially-known Environments
Paper and Code
Sep 16, 2020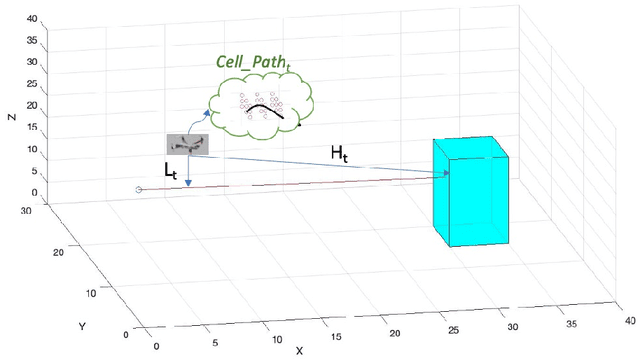


Proper path planning is the first step of robust and efficient autonomous navigation for mobile robots. Meanwhile, it is still challenging for robots to work in a complex environment without complete prior information. This paper presents an extension to the A* search algorithm and its variants to make the path planning stable with less computational burden while handling long-distance tasks. The implemented algorithm is capable of online searching for a collision-free and smooth path when heading to the defined goal position. This paper deploys the algorithm on the autonomous drone platform and implements it on a remote control car for algorithm efficiency validation.
View paper on