 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Navigation in Dynamic Environments using Density Functions
Nov 19, 2024



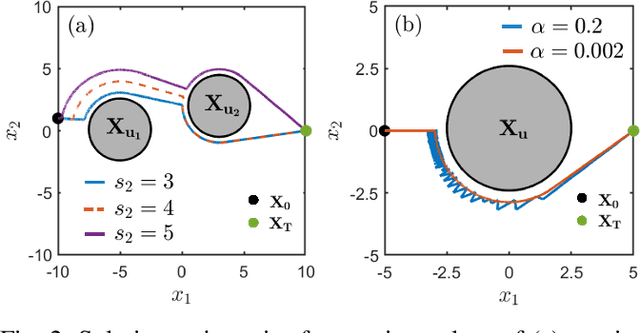
This work uses density functions for safe navigation in dynamic environments. The dynamic environment consists of time-varying obstacles as well as time-varying target sets. We propose an analytical construction of time-varying density functions to solve these navigation problems. The proposed approach leads to a time-varying feedback controller obtained as a positive gradient of the density function. This paper's main contribution is providing convergence proof using the analytically constructed density function for safe navigation in the presence of a dynamic obstacle set and time-varying target set. The results are the first of this kind developed for a system with integrator dynamics and open up the possibility for application to systems with more complex dynamics using methods based on control density function and inverse kinematic-based control design. We present the application of the developed approach for collision avoidance in multi-agent systems and robotic systems. While the theoretical results are produced for first-order integrator systems, we demonstrate how the framework can be applied for systems with non-trivial dynamics, such as Dubin's car model and fully actuated Euler-Lagrange system with robotics applications.
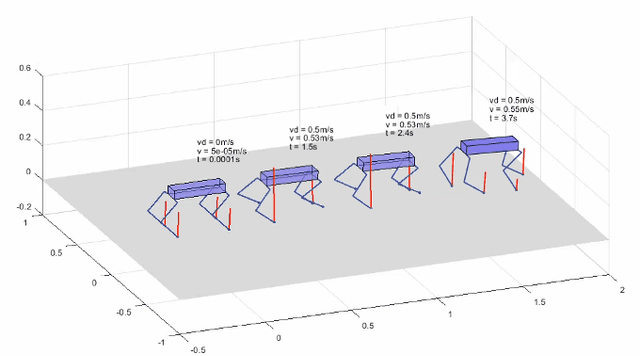
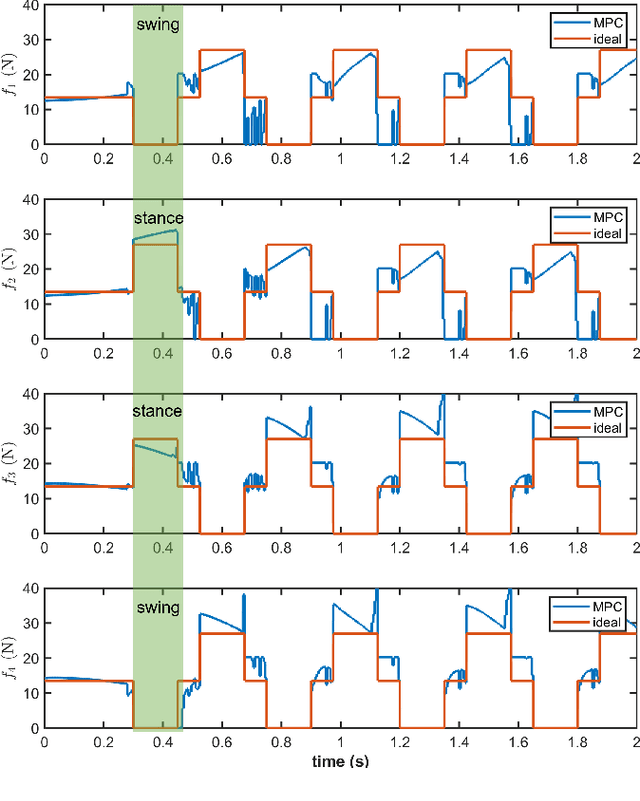
Safe Motion Planning for Quadruped Robots Using Density Functions
Dec 14, 2023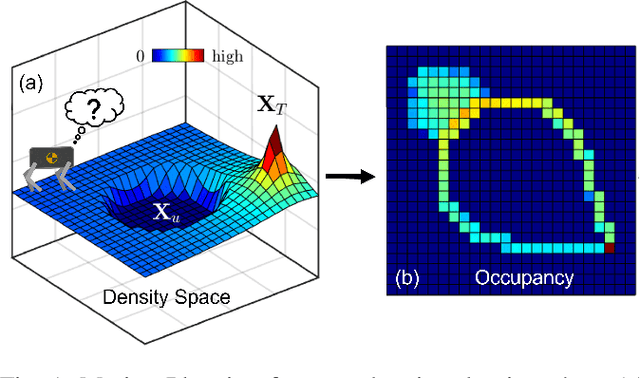
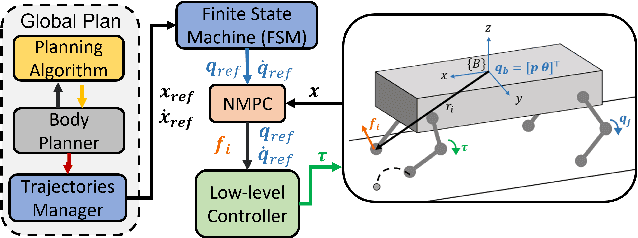
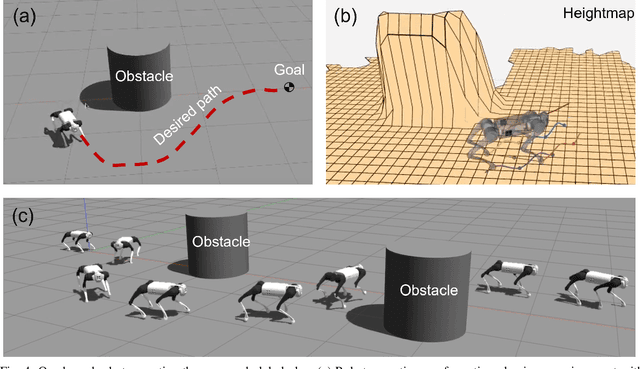
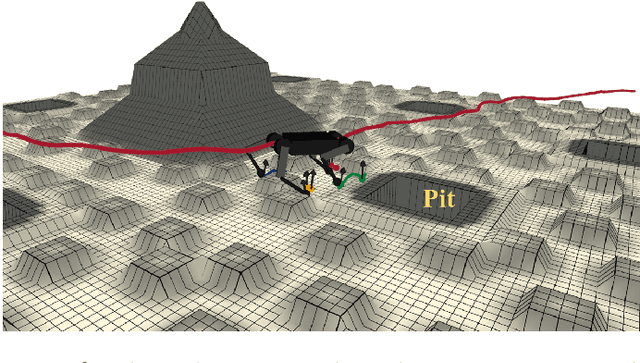
This paper presents a motion planning algorithm for quadruped locomotion based on density functions. We decompose the locomotion problem into a high-level density planner and a model predictive controller (MPC). Due to density functions having a physical interpretation through the notion of occupancy, it is intuitive to represent the environment with safety constraints. Hence, there is an ease of use to constructing the planning problem with density. The proposed method uses a simplified model of the robot into an integrator system, where the high-level plan is in a feedback form formulated through an analytically constructed density function. We then use the MPC to optimize the reference trajectory, in which a low-level PID controller is used to obtain the torque level control. The overall framework is implemented in simulation, demonstrating our feedback density planner for legged locomotion. The implementation of work is available at \url{https://github.com/AndrewZheng-1011/legged_planner}
Off-Road Navigation of Legged Robots Using Linear Transfer Operators
May 04, 2023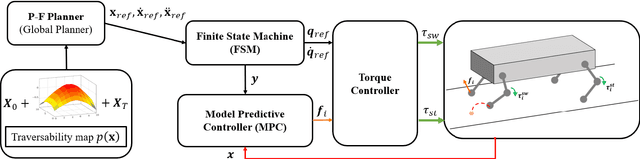
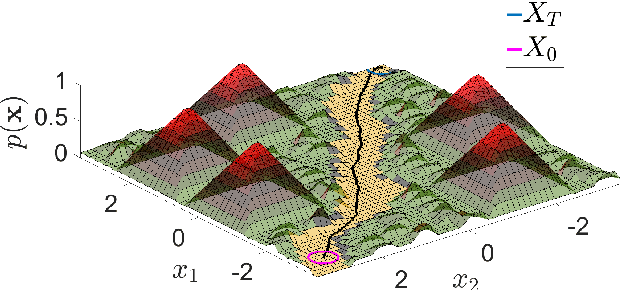
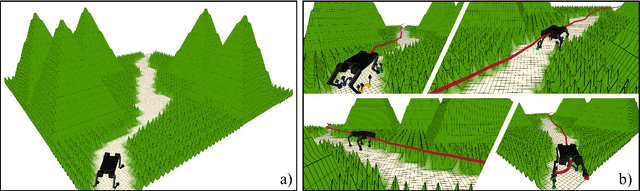
This paper presents the implementation of off-road navigation on legged robots using convex optimization through linear transfer operators. Given a traversability measure that captures the off-road environment, we lift the navigation problem into the density space using the Perron-Frobenius (P-F) operator. This allows the problem formulation to be represented as a convex optimization. Due to the operator acting on an infinite-dimensional density space, we use data collected from the terrain to get a finite-dimension approximation of the convex optimization. Results of the optimal trajectory for off-road navigation are compared with a standard iterative planner, where we show how our convex optimization generates a more traversable path for the legged robot compared to the suboptimal iterative planner.
Optimal Control for Quadruped Locomotion using LTV MPC
Dec 20, 2022

This paper presents a state-of-the-art optimal controller for quadruped locomotion. The robot dynamics is represented using a single rigid body (SRB) model. A linear time-varying model predictive controller (LTV MPC) is proposed by using linearization schemes. Simulation results show that the LTV MPC can execute various gaits, such as trot and crawl, and is capable of tracking desired reference trajectories even under unknown external disturbances. The LTV MPC is implemented as a quadratic program using qpOASES through the CasADi interface at 50 Hz. The proposed MPC can reach up to 1 m/s top speed with an acceleration of 0.5 m/s2 executing a trot gait. The implementation is available at https:// github.com/AndrewZheng-1011/Quad_ConvexMPC