 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Scalable and Parallelizable Digital Twin Framework for Sustainable Sim2Real Transition of Multi-Agent Reinforcement Learning Systems
Paper and Code
Mar 16, 2024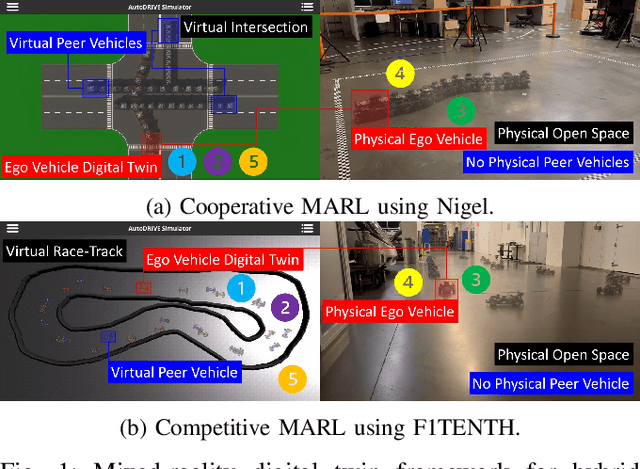

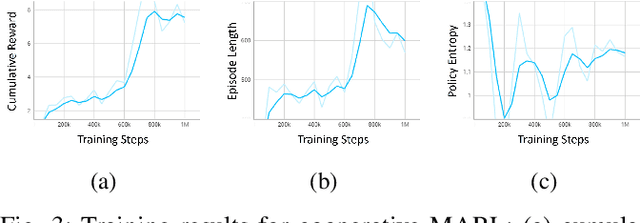
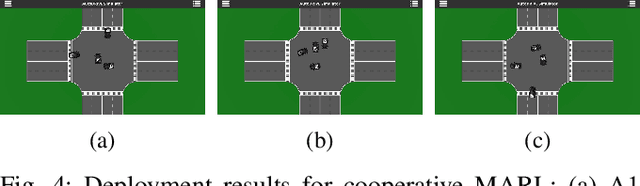
This work presents a sustainable multi-agent deep reinforcement learning framework capable of selectively scaling parallelized training workloads on-demand, and transferring the trained policies from simulation to reality using minimal hardware resources. We introduce AutoDRIVE Ecosystem as an enabling digital twin framework to train, deploy, and transfer cooperative as well as competitive multi-agent reinforcement learning policies from simulation to reality. Particularly, we first investigate an intersection traversal problem of 4 cooperative vehicles (Nigel) that share limited state information in single as well as multi-agent learning settings using a common policy approach. We then investigate an adversarial autonomous racing problem of 2 vehicles (F1TENTH) using an individual policy approach. In either set of experiments, a decentralized learning architecture was adopted, which allowed robust training and testing of the policies in stochastic environments. The agents were provided with realistically sparse observation spaces, and were restricted to sample control actions that implicitly satisfied the imposed kinodynamic and safety constraints. The experimental results for both problem statements are reported in terms of quantitative metrics and qualitative remarks for training as well as deployment phases. We also discuss agent and environment parallelization techniques adopted to efficiently accelerate MARL training, while analyzing their computational performance. Finally, we demonstrate a resource-aware transition of the trained policies from simulation to reality using the proposed digital twin framework.