 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStabilization of vertical motion of a vehicle on bumpy terrain using deep reinforcement learning
Sep 21, 2024Stabilizing vertical dynamics for on-road and off-road vehicles is an important research area that has been looked at mostly from the point of view of ride comfort. The advent of autonomous vehicles now shifts the focus more towards developing stabilizing techniques from the point of view of onboard proprioceptive and exteroceptive sensors whose real-time measurements influence the performance of an autonomous vehicle. The current solutions to this problem of managing the vertical oscillations usually limit themselves to the realm of active suspension systems without much consideration to modulating the vehicle velocity, which plays an important role by the virtue of the fact that vertical and longitudinal dynamics of a ground vehicle are coupled. The task of stabilizing vertical oscillations for military ground vehicles becomes even more challenging due lack of structured environments, like city roads or highways, in off-road scenarios. Moreover, changes in structural parameters of the vehicle, such as mass (due to changes in vehicle loading), suspension stiffness and damping values can have significant effect on the controller's performance. This demands the need for developing deep learning based control policies, that can take into account an extremely large number of input features and approximate a near optimal control action. In this work, these problems are addressed by training a deep reinforcement learning agent to minimize the vertical acceleration of a scaled vehicle travelling over bumps by controlling its velocity.
A General Framework for Pairwise Unbiased Learning to Rank
Jul 18, 2022


Pairwise debiasing is one of the most effective strategies in reducing position bias in learning-to-rank (LTR) models. However, limiting the scope of this strategy, are the underlying assumptions required by many pairwise debiasing approaches. In this paper, we develop an approach based on a minimalistic set of assumptions that can be applied to a much broader range of user browsing patterns and arbitrary presentation layouts. We implement the approach as a simplified version of the Unbiased LambdaMART and demonstrate that it retains the underlying unbiasedness property in a wider variety of settings than the original algorithm. Finally, using simulations with "golden" relevance labels, we will show that the simplified version compares favourably with the original Unbiased LambdaMART when the examination of different positions in a ranked list is not assumed to be independent.
Multilingual phonological analysis and speech synthesis
Jul 28, 1997
We give an overview of multilingual speech synthesis using the IPOX system. The first part discusses work in progress for various languages: Tashlhit Berber, Urdu and Dutch. The second part discusses a multilingual phonological grammar, which can be adapted to a particular language by setting parameters and adding language-specific details.
Stochastic phonological grammars and acceptability
Jul 28, 1997
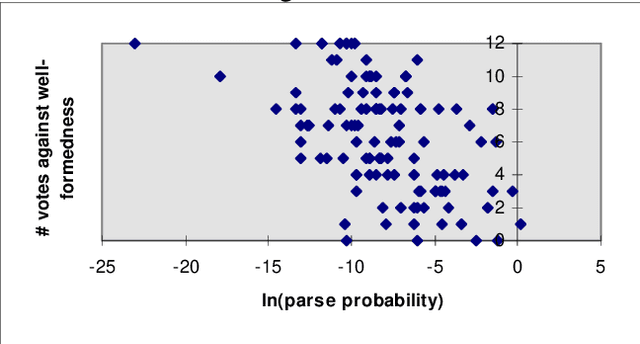
In foundational works of generative phonology it is claimed that subjects can reliably discriminate between possible but non-occurring words and words that could not be English. In this paper we examine the use of a probabilistic phonological parser for words to model experimentally-obtained judgements of the acceptability of a set of nonsense words. We compared various methods of scoring the goodness of the parse as a predictor of acceptability. We found that the probability of the worst part is not the best score of acceptability, indicating that classical generative phonology and Optimality Theory miss an important fact, as these approaches do not recognise a mechanism by which the frequency of well-formed parts may ameliorate the unacceptability of low-frequency parts. We argue that probabilistic generative grammars are demonstrably a more psychologically realistic model of phonological competence than standard generative phonology or Optimality Theory.