 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep-Unfolded Coordination
Jun 18, 2026Distributed optimization is a highly scalable and structurally transparent technique to solve multi-agent robotics problems; however, such methods often suffer from the need for highly-specialized, problem-specific hyperparameter tunings. In this work, we propose Deep Coordinator, a deep-unfolding framework that learns to dynamically adjust the hyperparameters of ADMM-DDP, a popular distributed solver for robotics tasks, at solve-time in response to optimizer performance. Our architecture consists of unrolling a fixed number of ADMM-DDP iterations into a neural network with learnable functions between layers mapping the optimizer state to the next hyperparameters. To the best of our knowledge, Deep Coordinator is the first deep-unfolding framework to adapt the penalty parameters of a non-convex optimizer at solve-time; we show that the mainstream supervised approach can yield degenerate solutions when training such models, and propose an unsupervised learning scheme. On simulations with fleets of cars and quadrotors, Deep Coordinator produces trajectories of comparable quality 6.18-9.44x faster than conventional solvers. Furthermore, Deep Coordinator retains its performance benefits when deployed to systems up to 8x larger than trained on.
Scalable Deep Unfolding of Conic Optimizers
Jun 11, 2026Deep unfolding (DU) accelerates iterative optimizers by introducing learnable components and training them through unrolled iterations, but extending DU to the large-scale semidefinite programs (SDPs) common in robotics has remained limited. Unrolling a full-update conic solver such as COSMO exposes two obstacles that prior work on learned conic solvers has not: backpropagating through the per-iteration linear-system solve incurs memory quadratic in the problem size once the coefficient matrix is formed explicitly, and backpropagating through the positive semidefinite (PSD) cone projection becomes numerically unstable when eigenvalues coincide. We address the first obstacle with a matrix-free implicit differentiation rule that operates entirely through matrix-vector products, reducing memory from $O(n^2)$ to $O(n)$ and enabling backpropagation at scales where direct factorization runs out of memory. We address the second with a backward rule based on the Dalečkii--Krein representation of the Fréchet derivative, which remains well-defined under repeated eigenvalues. Together these make it possible to learn lightweight hyperparameter policies and warm-starts for a full-update conic solver. We evaluate on nonlinear covariance steering problems solved via sequential convex programming (SCP), as well as standalone SDPs and second-order cone programs ranging from max-cut and Lovász $\vartheta$ SDPs to robust estimation and control problems. The learned policies outperform state-of-the-art solvers across all problems, and can provide up to a 50$\times$ speedup depending on the class. When used as a subroutine in SCP, the learned approach delivers over a 30$\times$ speedup compared to COSMO.
Beyond Pure Sampling: Hybrid Optimization Mechanisms for Non-Convex Model Predictive Control
May 30, 2026This paper investigates the optimization mechanisms of non-convex Model Predictive Control (MPC) using the Maximum Entropy Differential Dynamic Programming (ME-DDP) framework. Navigating non-convex cost landscapes induced by nonlinear dynamics, multiple obstacles, etc. remains a fundamental challenge in robotics, where gradient-based methods frequently converge to suboptimal local minima. We demonstrate a dual-step optimization mechanism designed to overcome these traps. (1) an initial phase of using DDP to exploit the gradient of the cost landscape, followed by (2) disruption of the optimization via sampling from policies characterized by the inverse Hessian of the action-value function. We provide a rigorous analysis of this sampling mechanism of three ME-DDP variants: Unimodal Gaussian ME-DDP, Multimodal Gaussian ME-DDP, and Stein Variational DDP. Furthermore, with navigation tasks of four robotic systems under cluttered environments, we conduct extensive benchmarking of three variants of the ME-DDP, against deterministic DDP, and one of the most successful sampling-based schemes, Model Predictive Path Integral (MPPI) control with three policy parameterizations and update laws that correspond to those of ME-DDPs. The results show that in low-dimensional systems where the cost landscapes are relatively simple and local information is sufficiently representative, our framework consistently outperforms MPPIs. In high-dimensional systems, MPPI can occasionally discover aggressive maneuvers that enable it to steer the systems faster than DDP-based methods, whereas our method maintains a higher, more stable success rate. Finally, we validate the practical efficacy of the framework through hardware experiments with a quadrotor navigating a dense, non-convex obstacle field, confirming the robustness of the proposed framework for real-world deployment.
Multistep Belief Space Dynamics Learning For Risk-Aware Control
May 12, 2026As autonomous vehicles move from a simplified research setting to practical use, there exists a large gap between the dynamic behavior of a human driving and an autonomous system. Risk-aware behavior needs to naturally develop in order to scale to the demands of the real world. A major issue for risk-aware planning and control has been predicting how dynamical uncertainty evolves through time and optimizing plans that account for this without being overly conservative. Here, we present a learning framework to predict distributional dynamics that can be optimized in real time for Model Predictive Control (MPC). We explore the importance of structure when learning distributional dynamics for use in MPC. A rigorous ablation study is conducted on a large dataset of real world off-road driving that shows the impact of deviations from our proposed structure. Furthermore, we deploy our learned model and planning stack on a full sized vehicle in challenging off-road conditions. Our planning architecture is able to naturally regulate the speed of the vehicle based on the environment and consistently demonstrates intelligent behavior over miles of diverse terrain.
Sampling-Based Control via Entropy-Regularized Optimal Transport
May 04, 2026Sampling-based model predictive control methods like MPPI and CEM are essential for real-time control of nonlinear robotic systems, particularly where discontinuous dynamics preclude gradient-based optimization. However, these methods derive from information-theoretic objectives that are agnostic to the geometry of the control problem, leading to pathological behaviors such as mode-averaging when the cost landscape is complex. We present OT-MPC, a sampling-based algorithm that overcomes these limitations through an entropy-regularized optimal transport formulation. By computing an optimal coupling between candidate control sequences and low-cost proposals, OT-MPC refines candidates toward nearby promising samples while coordinating updates across the ensemble to maintain coverage of the solution space. We derive closed-form, gradient-free updates via the Sinkhorn algorithm, enabling real-time performance. Experiments on navigation, manipulation, and locomotion tasks demonstrate improved success rates over existing methods.
Fundamental Limits for Sensor-Based Control via the Gibbs Variational Principle
Mar 19, 2026Fundamental limits on the performance of feedback controllers are essential for benchmarking algorithms, guiding sensor selection, and certifying task feasibility -- yet few general-purpose tools exist for computing them. Existing information-theoretic approaches overestimate the information a sensor must provide by evaluating it against the uncontrolled system, producing bounds that degrade precisely when feedback is most valuable. We derive a lower bound on the minimum expected cost of any causal feedback controller under partial observations by applying the Gibbs variational principle to the joint path measure over states and observations. The bound applies to nonlinear, nonholonomic, and hybrid dynamics with unbounded costs and admits a self-consistent refinement: any good controller concentrates the state, which limits the information the sensor can extract, which tightens the bound. The resulting fixed-point equation has a unique solution computable by bisection, and we provide conditions under which the free energy minimization is provably convex, yielding a certifiably correct numerical bound. On a nonlinear Dubins car tracking problem, the self-consistent bound captures most of the optimal cost across sensor noise levels, while the open-loop variant is vacuous at low noise.
cuNRTO: GPU-Accelerated Nonlinear Robust Trajectory Optimization
Mar 03, 2026Robust trajectory optimization enables autonomous systems to operate safely under uncertainty by computing control policies that satisfy the constraints for all bounded disturbances. However, these problems often lead to large Second Order Conic Programming (SOCP) constraints, which are computationally expensive. In this work, we propose the CUDA Nonlinear Robust Trajectory Optimization (cuNRTO) framework by introducing two dynamic optimization architectures that have direct application to robust decision-making and are implemented on CUDA. The first architecture, NRTO-DR, leverages the Douglas-Rachford (DR) splitting method to solve the SOCP inner subproblems of NRTO, thereby significantly reducing the computational burden through parallel SOCP projections and sparse direct solves. The second architecture, NRTO-FullADMM, is a novel variant that further exploits the problem structure to improve scalability using the Alternating Direction Method of Multipliers (ADMM). Finally, we provide GPU implementation of the proposed methodologies using custom CUDA kernels for SOC projection steps and cuBLAS GEMM chains for feedback gain updates. We validate the performance of cuNRTO through simulated experiments on unicycle, quadcopter, and Franka manipulator models, demonstrating speedup up to 139.6$\times$.
Optimal Control Theoretic Neural Optimizer: From Backpropagation to Dynamic Programming
Oct 15, 2025Optimization of deep neural networks (DNNs) has been a driving force in the advancement of modern machine learning and artificial intelligence. With DNNs characterized by a prolonged sequence of nonlinear propagation, determining their optimal parameters given an objective naturally fits within the framework of Optimal Control Programming. Such an interpretation of DNNs as dynamical systems has proven crucial in offering a theoretical foundation for principled analysis from numerical equations to physics. In parallel to these theoretical pursuits, this paper focuses on an algorithmic perspective. Our motivated observation is the striking algorithmic resemblance between the Backpropagation algorithm for computing gradients in DNNs and the optimality conditions for dynamical systems, expressed through another backward process known as dynamic programming. Consolidating this connection, where Backpropagation admits a variational structure, solving an approximate dynamic programming up to the first-order expansion leads to a new class of optimization methods exploring higher-order expansions of the Bellman equation. The resulting optimizer, termed Optimal Control Theoretic Neural Optimizer (OCNOpt), enables rich algorithmic opportunities, including layer-wise feedback policies, game-theoretic applications, and higher-order training of continuous-time models such as Neural ODEs. Extensive experiments demonstrate that OCNOpt improves upon existing methods in robustness and efficiency while maintaining manageable computational complexity, paving new avenues for principled algorithmic design grounded in dynamical systems and optimal control theory.
Momentum Multi-Marginal Schrödinger Bridge Matching
Jun 11, 2025Understanding complex systems by inferring trajectories from sparse sample snapshots is a fundamental challenge in a wide range of domains, e.g., single-cell biology, meteorology, and economics. Despite advancements in Bridge and Flow matching frameworks, current methodologies rely on pairwise interpolation between adjacent snapshots. This hinders their ability to capture long-range temporal dependencies and potentially affects the coherence of the inferred trajectories. To address these issues, we introduce \textbf{Momentum Multi-Marginal Schr\"odinger Bridge Matching (3MSBM)}, a novel matching framework that learns smooth measure-valued splines for stochastic systems that satisfy multiple positional constraints. This is achieved by lifting the dynamics to phase space and generalizing stochastic bridges to be conditioned on several points, forming a multi-marginal conditional stochastic optimal control problem. The underlying dynamics are then learned by minimizing a variational objective, having fixed the path induced by the multi-marginal conditional bridge. As a matching approach, 3MSBM learns transport maps that preserve intermediate marginals throughout training, significantly improving convergence and scalability. Extensive experimentation in a series of real-world applications validates the superior performance of 3MSBM compared to existing methods in capturing complex dynamics with temporal dependencies, opening new avenues for training matching frameworks in multi-marginal settings.
Nearly Optimal Nonlinear Safe Control with BaS-SDRE
Apr 21, 2025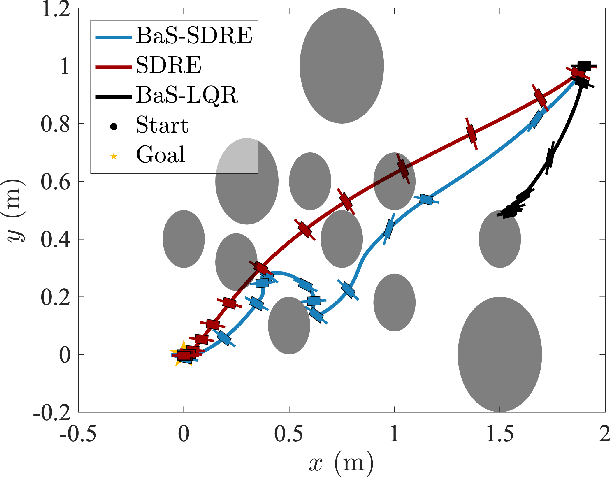
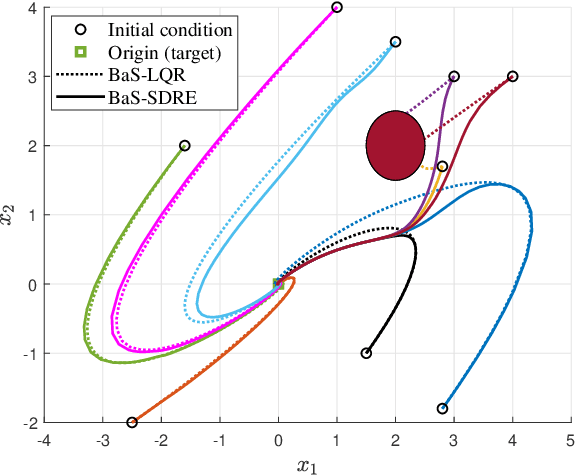
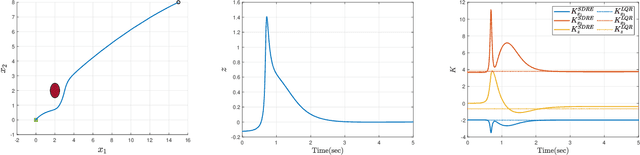
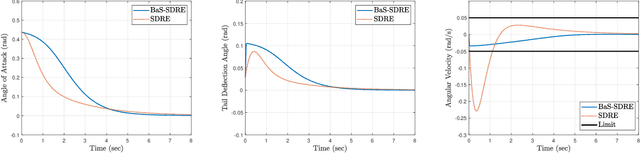
The State-Dependent Riccati Equation (SDRE) approach has emerged as a systematic and effective means of designing nearly optimal nonlinear controllers. The Barrier States (BaS) embedding methodology was developed recently for safe multi-objective controls in which the safety condition is manifested as a state to be controlled along with other states of the system. The overall system, termed the safety embedded system, is highly nonlinear even if the original system is linear. This paper develops a nonlinear nearly optimal safe feedback control technique by combining the two strategies effectively. First, the BaS is derived in an extended linearization formulation to be subsequently used to form an extended safety embedded system. A new optimal control problem is formed thereafter, which is used to construct a safety embedded State-Dependent Riccati Equation, termed BaS-SDRE, whose solution approximates the solution of the optimal control problem's associated Hamilton-Jacobi-Bellman (HJB) equation. The BaS-SDRE is then solved online to synthesize the nearly optimal safe control. The proposed technique's efficacy is demonstrated on an unstable, constrained linear system that shows how the synthesized control reacts to nonlinearities near the unsafe region, a nonlinear flight control system with limited path angular velocity that exists due to structural and dynamic concerns, and a planar quadrotor system that navigates safely in a crowded environment.