 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNearly Optimal Nonlinear Safe Control with BaS-SDRE
Apr 21, 2025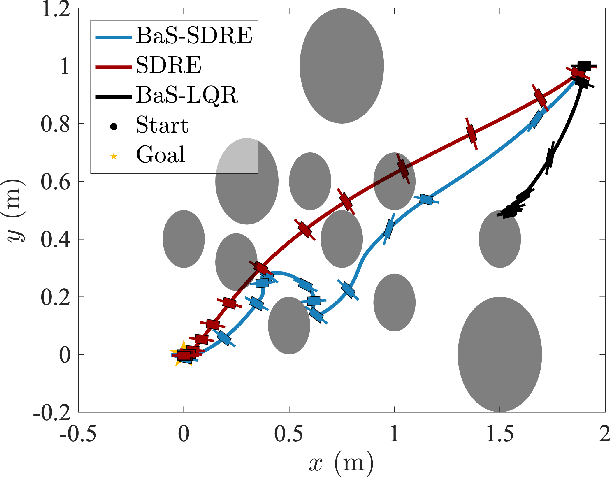
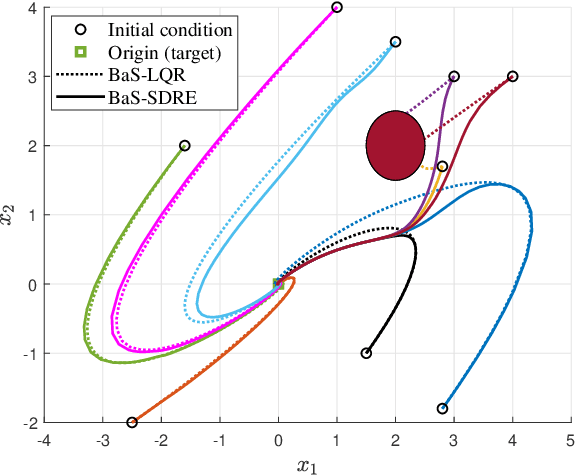
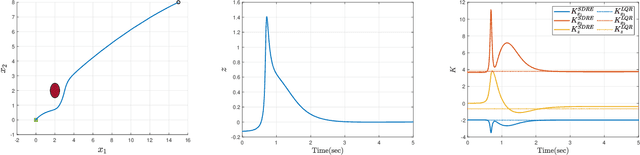
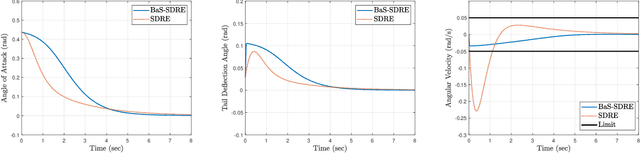
The State-Dependent Riccati Equation (SDRE) approach has emerged as a systematic and effective means of designing nearly optimal nonlinear controllers. The Barrier States (BaS) embedding methodology was developed recently for safe multi-objective controls in which the safety condition is manifested as a state to be controlled along with other states of the system. The overall system, termed the safety embedded system, is highly nonlinear even if the original system is linear. This paper develops a nonlinear nearly optimal safe feedback control technique by combining the two strategies effectively. First, the BaS is derived in an extended linearization formulation to be subsequently used to form an extended safety embedded system. A new optimal control problem is formed thereafter, which is used to construct a safety embedded State-Dependent Riccati Equation, termed BaS-SDRE, whose solution approximates the solution of the optimal control problem's associated Hamilton-Jacobi-Bellman (HJB) equation. The BaS-SDRE is then solved online to synthesize the nearly optimal safe control. The proposed technique's efficacy is demonstrated on an unstable, constrained linear system that shows how the synthesized control reacts to nonlinearities near the unsafe region, a nonlinear flight control system with limited path angular velocity that exists due to structural and dynamic concerns, and a planar quadrotor system that navigates safely in a crowded environment.