 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamics Modeling using Visual Terrain Features for High-Speed Autonomous Off-Road Driving
Nov 30, 2024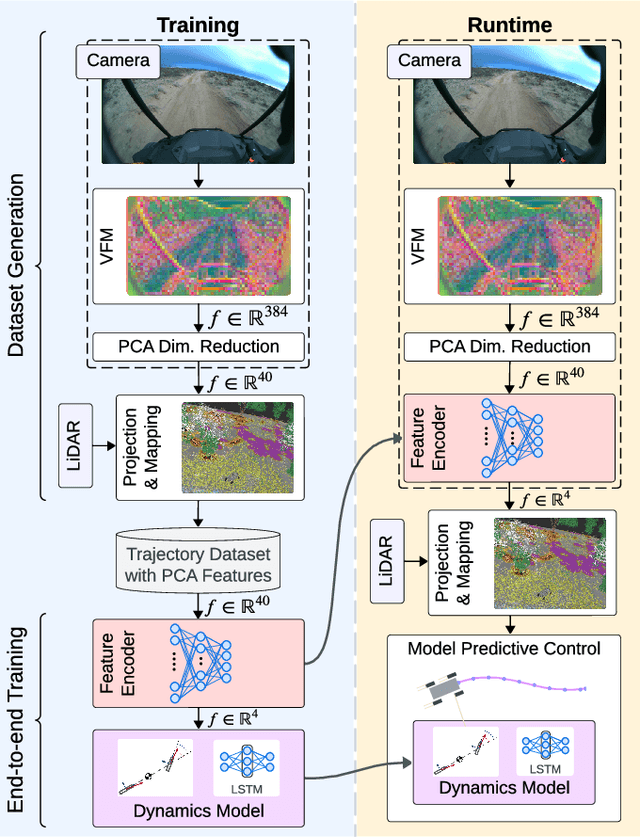

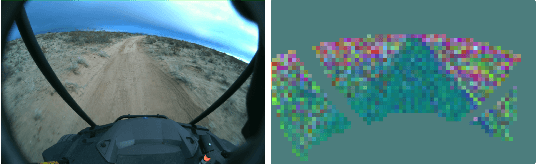
Rapid autonomous traversal of unstructured terrain is essential for scenarios such as disaster response, search and rescue, or planetary exploration. As a vehicle navigates at the limit of its capabilities over extreme terrain, its dynamics can change suddenly and dramatically. For example, high-speed and varying terrain can affect parameters such as traction, tire slip, and rolling resistance. To achieve effective planning in such environments, it is crucial to have a dynamics model that can accurately anticipate these conditions. In this work, we present a hybrid model that predicts the changing dynamics induced by the terrain as a function of visual inputs. We leverage a pre-trained visual foundation model (VFM) DINOv2, which provides rich features that encode fine-grained semantic information. To use this dynamics model for planning, we propose an end-to-end training architecture for a projection distance independent feature encoder that compresses the information from the VFM, enabling the creation of a lightweight map of the environment at runtime. We validate our architecture on an extensive dataset (hundreds of kilometers of aggressive off-road driving) collected across multiple locations as part of the DARPA Robotic Autonomy in Complex Environments with Resiliency (RACER) program. https://www.youtube.com/watch?v=dycTXxEosMk
TinyMPC: Model-Predictive Control on Resource-Constrained Microcontrollers
Oct 25, 2023Model-predictive control (MPC) is a powerful tool for controlling highly dynamic robotic systems subject to complex constraints. However, MPC is computationally demanding, and is often impractical to implement on small, resource-constrained robotic platforms. We present TinyMPC, a high-speed MPC solver with a low memory footprint targeting the microcontrollers common on small robots. Our approach is based on the alternating direction method of multipliers (ADMM) and leverages the structure of the MPC problem for efficiency. We demonstrate TinyMPC both by benchmarking against the state-of-the-art solver OSQP, achieving nearly an order of magnitude speed increase, as well as through hardware experiments on a 27 g quadrotor, demonstrating high-speed trajectory tracking and dynamic obstacle avoidance.