 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeARGOS: An Automaton Referencing Guided Overtake System for Head-to-Head Autonomous Racing
Jan 28, 2024Autonomous overtaking at high speeds is a challenging multi-agent robotics research problem. The high-speed and close proximity situations that arise in multi-agent autonomous racing require designing algorithms that trade off aggressive overtaking maneuvers and minimize the risk of collision with the opponent. In this paper, we study a special case of multi-agent autonomous race, called the head-to-head autonomous race, that requires two racecars with similar performance envelopes. We present a mathematical formulation of an overtake and position defense in this head-to-head autonomous racing scenario, and we introduce the Automaton Referencing Guided Overtake System (ARGOS) framework that supervises the execution of an overtake or position defense maneuver depending on the current role of the racecar. The ARGOS framework works by decomposing complex overtake and position-defense maneuvers into sequential and temporal submaneuvers that are individually managed and supervised by a network of automatons. We verify the properties of the ARGOS framework using model-checking and demonstrate results from multiple simulations, which show that the framework meets the desired specifications. The ARGOS framework performs similar to what can be observed from real-world human-driven motor sport racing.
Adaptive Lookahead Pure-Pursuit for Autonomous Racing
Nov 17, 2021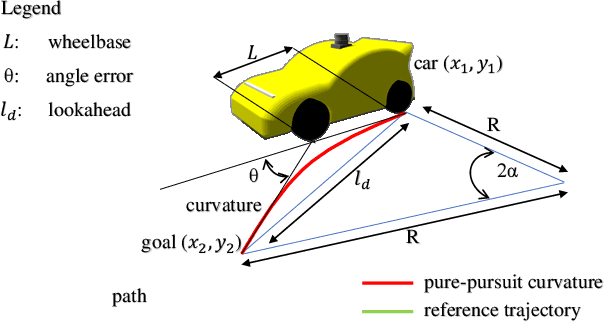
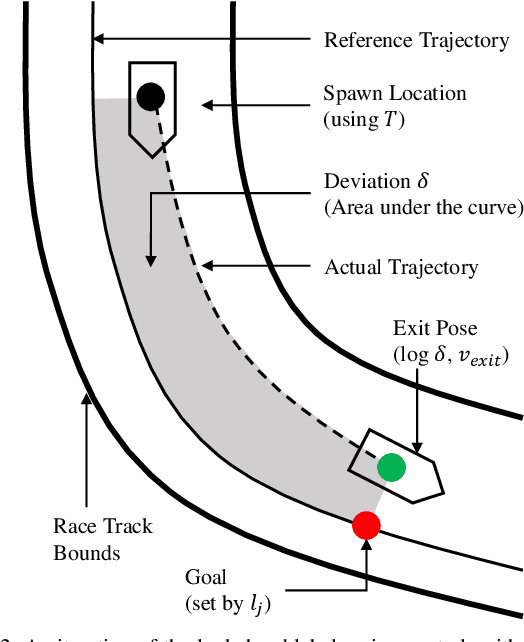
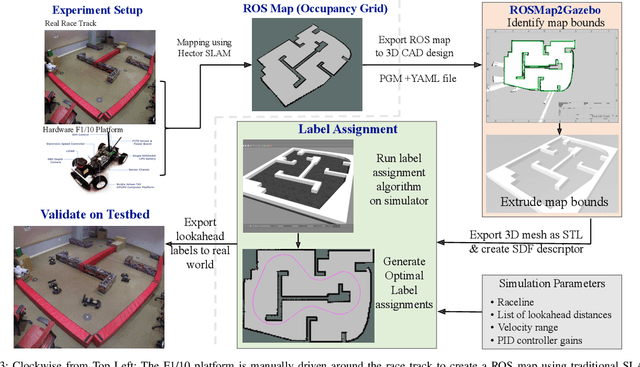
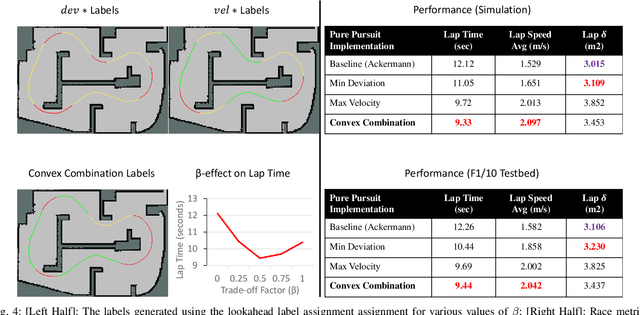
This paper presents an adaptive lookahead pure-pursuit lateral controller for optimizing racing metrics such as lap time, average lap speed, and deviation from a reference trajectory in an autonomous racing scenario. We propose a greedy algorithm to compute and assign optimal lookahead distances for the pure-pursuit controller for each waypoint on a reference trajectory for improving the race metrics. We use a ROS based autonomous racing simulator to evaluate the adaptive pure-pursuit algorithm and compare our method with several other pure-pursuit based lateral controllers. We also demonstrate our approach on a scaled real testbed using a F1/10 autonomous racecar. Our method results in a significant improvement (20%) in the racing metrics for an autonomous racecar.
F1/10: An Open-Source Autonomous Cyber-Physical Platform
Jan 24, 2019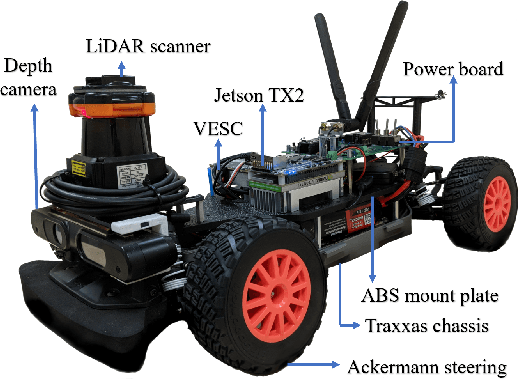
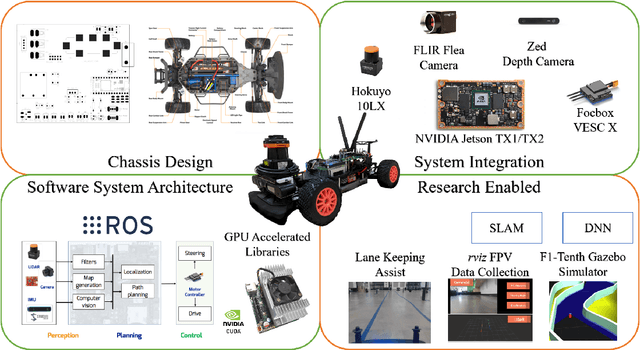
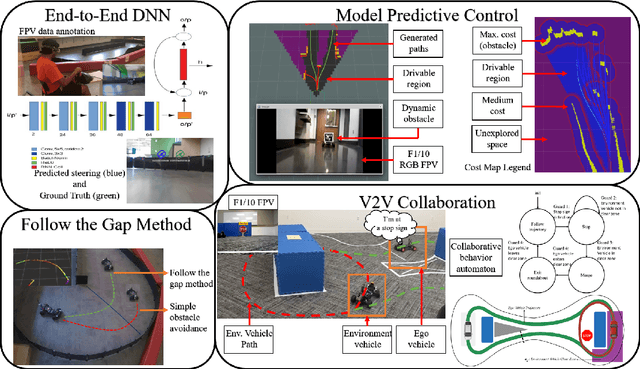
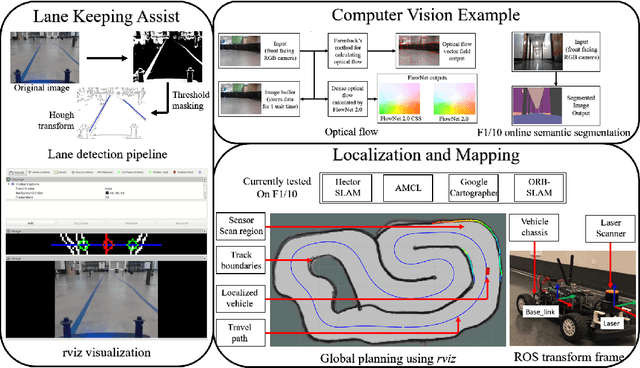
In 2005 DARPA labeled the realization of viable autonomous vehicles (AVs) a grand challenge; a short time later the idea became a moonshot that could change the automotive industry. Today, the question of safety stands between reality and solved. Given the right platform the CPS community is poised to offer unique insights. However, testing the limits of safety and performance on real vehicles is costly and hazardous. The use of such vehicles is also outside the reach of most researchers and students. In this paper, we present F1/10: an open-source, affordable, and high-performance 1/10 scale autonomous vehicle testbed. The F1/10 testbed carries a full suite of sensors, perception, planning, control, and networking software stacks that are similar to full scale solutions. We demonstrate key examples of the research enabled by the F1/10 testbed, and how the platform can be used to augment research and education in autonomous systems, making autonomy more accessible.