 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen Challenges in the Formal Verification of Autonomous Driving
Nov 21, 2024



In the realm of autonomous driving, the development and integration of highly complex and heterogeneous systems are standard practice. Modern vehicles are not monolithic systems; instead, they are composed of diverse hardware components, each running its own software systems. An autonomous vehicle comprises numerous independent components, often developed by different and potentially competing companies. This diversity poses significant challenges for the certification process, as it necessitates certifying components that may not disclose their internal behaviour (black-boxes). In this paper, we present a real-world case study of an autonomous driving system, identify key open challenges associated with its development and integration, and explore how formal verification techniques can address these challenges to ensure system reliability and safety.
* In Proceedings FMAS2024, arXiv:2411.13215
Performance/power assessment of CNN packages on embedded automotive platforms
Oct 12, 2023



The rise of power-efficient embedded computers based on highly-parallel accelerators opens a number of opportunities and challenges for researchers and engineers, and paved the way to the era of edge computing. At the same time, advances in embedded AI for object detection and categorization such as YOLO, GoogleNet and AlexNet reached an unprecedented level of accuracy (mean-Average Precision - mAP) and performance (Frames-Per-Second - FPS). Today, edge computers based on heterogeneous many-core systems are a predominant choice to deploy such systems in industry 4.0, wearable devices, and - our focus - autonomous driving systems. In these latter systems, engineers struggle to make reduced automotive power and size budgets co-exist with the accuracy and performance targets requested by autonomous driving. We aim at validating the effectiveness and efficiency of most recent networks on state-of-the-art platforms with embedded commercial-off-the-shelf System-on-Chips, such as Xavier AGX, Tegra X2 and Nano for NVIDIA and XCZU9EG and XCZU3EG of the Zynq UltraScale+ family, for the Xilinx counterpart. Our work aims at supporting engineers in choosing the most appropriate CNN package and computing system for their designs, and deriving guidelines for adequately sizing their systems.
F1/10: An Open-Source Autonomous Cyber-Physical Platform
Jan 24, 2019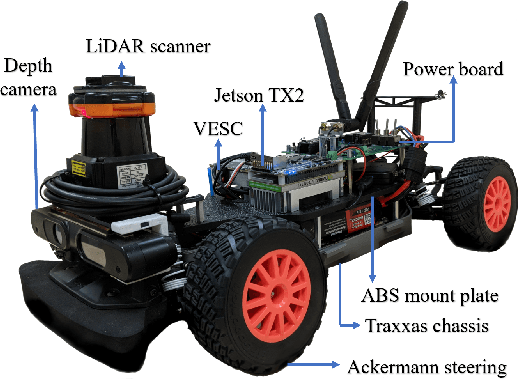
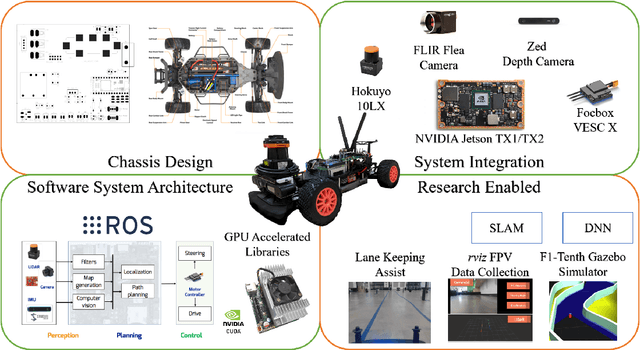
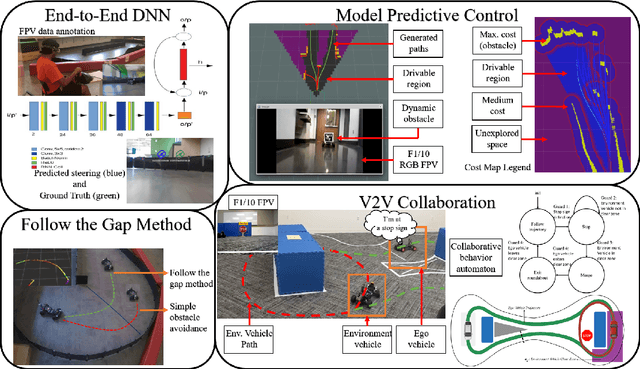
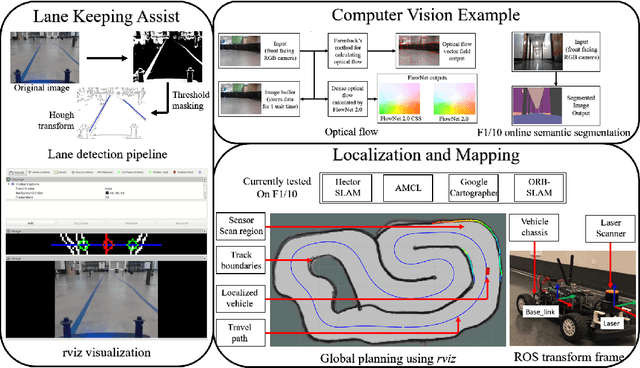
In 2005 DARPA labeled the realization of viable autonomous vehicles (AVs) a grand challenge; a short time later the idea became a moonshot that could change the automotive industry. Today, the question of safety stands between reality and solved. Given the right platform the CPS community is poised to offer unique insights. However, testing the limits of safety and performance on real vehicles is costly and hazardous. The use of such vehicles is also outside the reach of most researchers and students. In this paper, we present F1/10: an open-source, affordable, and high-performance 1/10 scale autonomous vehicle testbed. The F1/10 testbed carries a full suite of sensors, perception, planning, control, and networking software stacks that are similar to full scale solutions. We demonstrate key examples of the research enabled by the F1/10 testbed, and how the platform can be used to augment research and education in autonomous systems, making autonomy more accessible.