 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThis is the Way: Differential Bayesian Filtering for Agile Trajectory Synthesis
Jul 15, 2022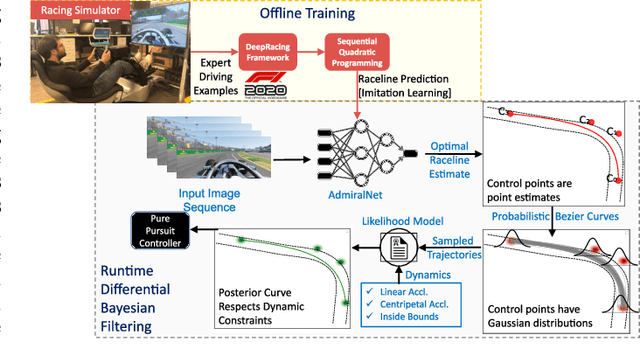
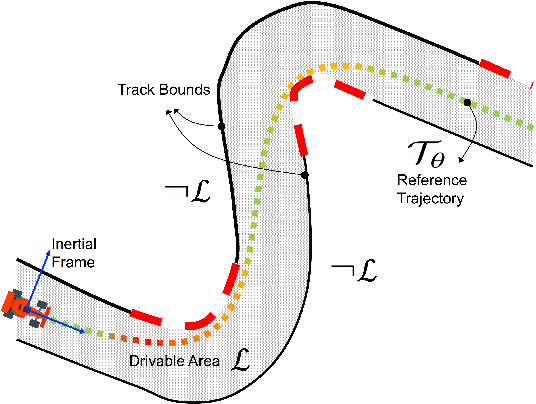

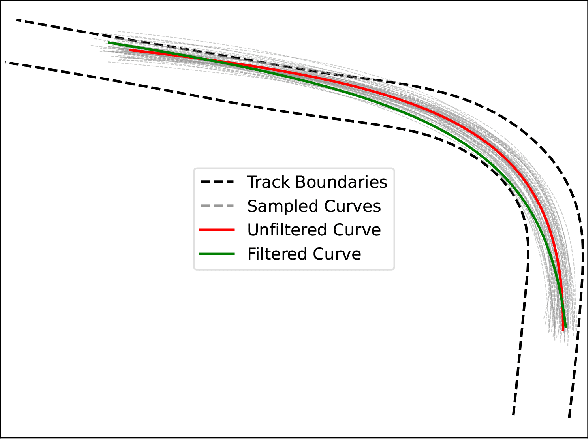
One of the main challenges in autonomous racing is to design algorithms for motion planning at high speed, and across complex racing courses. End-to-end trajectory synthesis has been previously proposed where the trajectory for the ego vehicle is computed based on camera images from the racecar. This is done in a supervised learning setting using behavioral cloning techniques. In this paper, we address the limitations of behavioral cloning methods for trajectory synthesis by introducing Differential Bayesian Filtering (DBF), which uses probabilistic B\'ezier curves as a basis for inferring optimal autonomous racing trajectories based on Bayesian inference. We introduce a trajectory sampling mechanism and combine it with a filtering process which is able to push the car to its physical driving limits. The performance of DBF is evaluated on the DeepRacing Formula One simulation environment and compared with several other trajectory synthesis approaches as well as human driving performance. DBF achieves the fastest lap time, and the fastest speed, by pushing the racecar closer to its limits of control while always remaining inside track bounds.
DeepRacing: Parameterized Trajectories for Autonomous Racing
May 06, 2020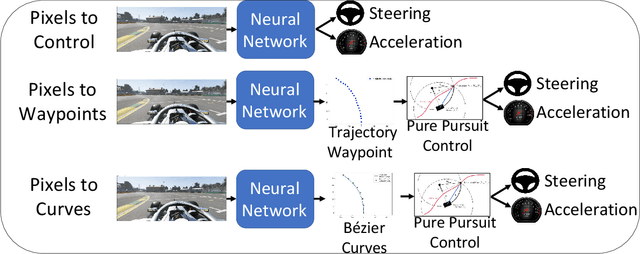
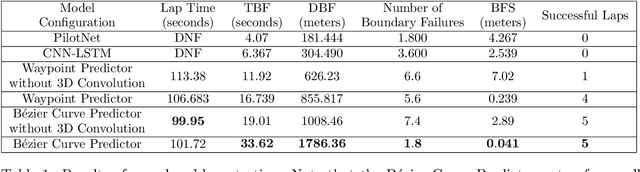


We consider the challenging problem of high speed autonomous racing in a realistic Formula One environment. DeepRacing is a novel end-to-end framework, and a virtual testbed for training and evaluating algorithms for autonomous racing. The virtual testbed is implemented using the realistic F1 series of video games, developed by Codemasters, which many Formula One drivers use for training. This virtual testbed is released under an open-source license both as a standalone C++ API and as a binding to the popular Robot Operating System 2 (ROS2) framework. This open-source API allows anyone to use the high fidelity physics and photo-realistic capabilities of the F1 game as a simulator, and without hacking any game engine code. We use this framework to evaluate several neural network methodologies for autonomous racing. Specifically, we consider several fully end-to-end models that directly predict steering and acceleration commands for an autonomous race car as well as a model that predicts a list of waypoints to follow in the car's local coordinate system, with the task of selecting a steering/throttle angle left to a classical control algorithm. We also present a novel method of autonomous racing by training a deep neural network to predict a parameterized representation of a trajectory rather than a list of waypoints. We evaluate these models performance in our open-source simulator and show that trajectory prediction far outperforms end-to-end driving. Additionally, we show that open-loop performance for an end-to-end model, i.e. root-mean-square error for a model's predicted control values, does not necessarily correlate with increased driving performance in the closed-loop sense, i.e. actual ability to race around a track. Finally, we show that our proposed model of parameterized trajectory prediction outperforms both end-to-end control and waypoint prediction.