 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBETTY Dataset: A Multi-modal Dataset for Full-Stack Autonomy
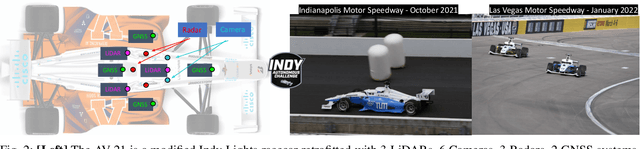
May 12, 2025We present the BETTY dataset, a large-scale, multi-modal dataset collected on several autonomous racing vehicles, targeting supervised and self-supervised state estimation, dynamics modeling, motion forecasting, perception, and more. Existing large-scale datasets, especially autonomous vehicle datasets, focus primarily on supervised perception, planning, and motion forecasting tasks. Our work enables multi-modal, data-driven methods by including all sensor inputs and the outputs from the software stack, along with semantic metadata and ground truth information. The dataset encompasses 4 years of data, currently comprising over 13 hours and 32TB, collected on autonomous racing vehicle platforms. This data spans 6 diverse racing environments, including high-speed oval courses, for single and multi-agent algorithm evaluation in feature-sparse scenarios, as well as high-speed road courses with high longitudinal and lateral accelerations and tight, GPS-denied environments. It captures highly dynamic states, such as 63 m/s crashes, loss of tire traction, and operation at the limit of stability. By offering a large breadth of cross-modal and dynamic data, the BETTY dataset enables the training and testing of full autonomy stack pipelines, pushing the performance of all algorithms to the limits. The current dataset is available at https://pitt-mit-iac.github.io/betty-dataset/.
Fast and Modular Autonomy Software for Autonomous Racing Vehicles
Aug 27, 2024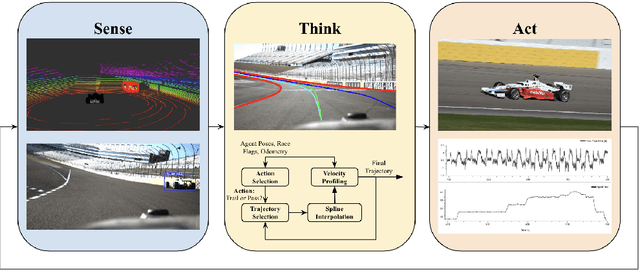


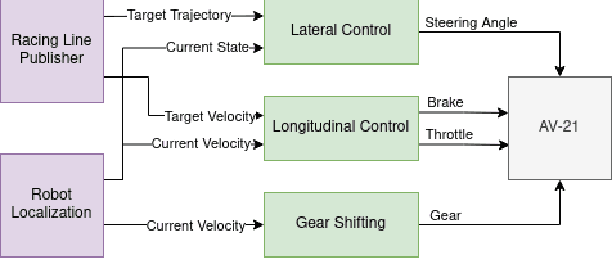
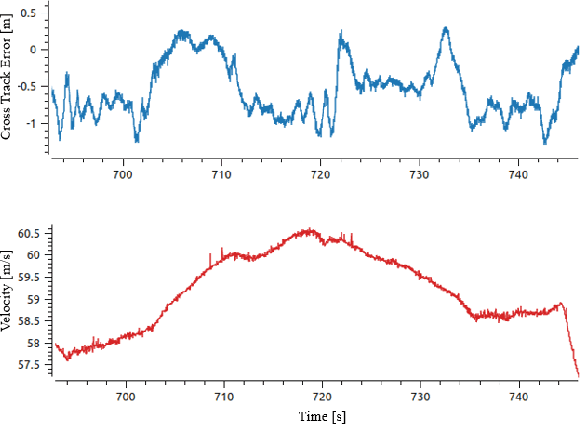
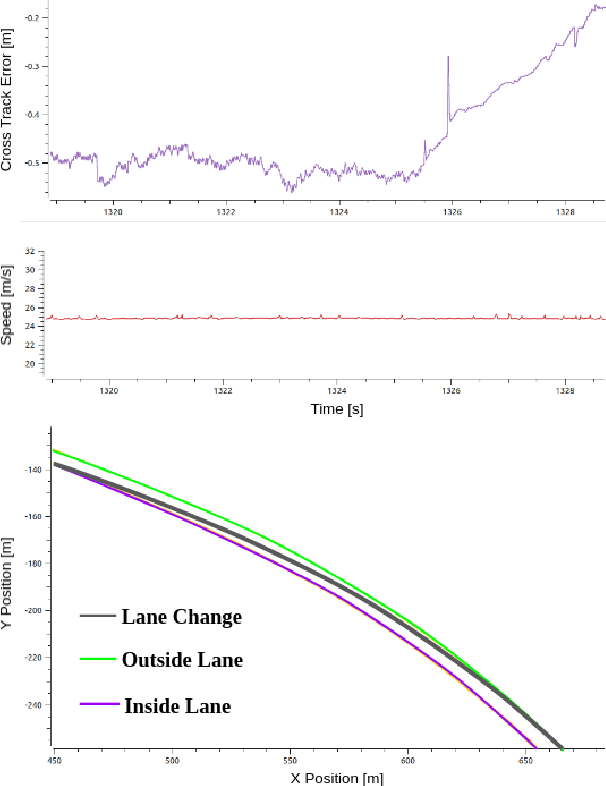
Autonomous motorsports aim to replicate the human racecar driver with software and sensors. As in traditional motorsports, Autonomous Racing Vehicles (ARVs) are pushed to their handling limits in multi-agent scenarios at extremely high ($\geq 150mph$) speeds. This Operational Design Domain (ODD) presents unique challenges across the autonomy stack. The Indy Autonomous Challenge (IAC) is an international competition aiming to advance autonomous vehicle development through ARV competitions. While far from challenging what a human racecar driver can do, the IAC is pushing the state of the art by facilitating full-sized ARV competitions. This paper details the MIT-Pitt-RW Team's approach to autonomous racing in the IAC. In this work, we present our modular and fast approach to agent detection, motion planning and controls to create an autonomy stack. We also provide analysis of the performance of the software stack in single and multi-agent scenarios for rapid deployment in a fast-paced competition environment. We also cover what did and did not work when deployed on a physical system the Dallara AV-21 platform and potential improvements to address these shortcomings. Finally, we convey lessons learned and discuss limitations and future directions for improvement.
* Published in Journal of Field Robotics
TartanDrive 2.0: More Modalities and Better Infrastructure to Further Self-Supervised Learning Research in Off-Road Driving Tasks
Feb 02, 2024
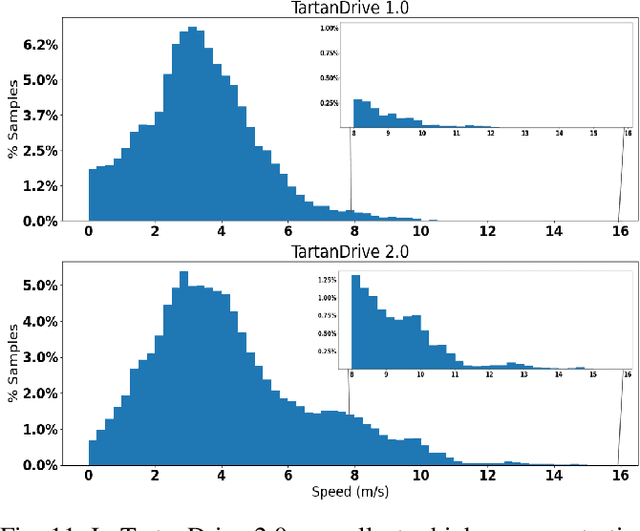


We present TartanDrive 2.0, a large-scale off-road driving dataset for self-supervised learning tasks. In 2021 we released TartanDrive 1.0, which is one of the largest datasets for off-road terrain. As a follow-up to our original dataset, we collected seven hours of data at speeds of up to 15m/s with the addition of three new LiDAR sensors alongside the original camera, inertial, GPS, and proprioceptive sensors. We also release the tools we use for collecting, processing, and querying the data, including our metadata system designed to further the utility of our data. Custom infrastructure allows end users to reconfigure the data to cater to their own platforms. These tools and infrastructure alongside the dataset are useful for a variety of tasks in the field of off-road autonomy and, by releasing them, we encourage collaborative data aggregation. These resources lower the barrier to entry to utilizing large-scale datasets, thereby helping facilitate the advancement of robotics in areas such as self-supervised learning, multi-modal perception, inverse reinforcement learning, and representation learning. The dataset is available at https://github.com/castacks/tartan drive 2.0.
RACECAR -- The Dataset for High-Speed Autonomous Racing
Jun 05, 2023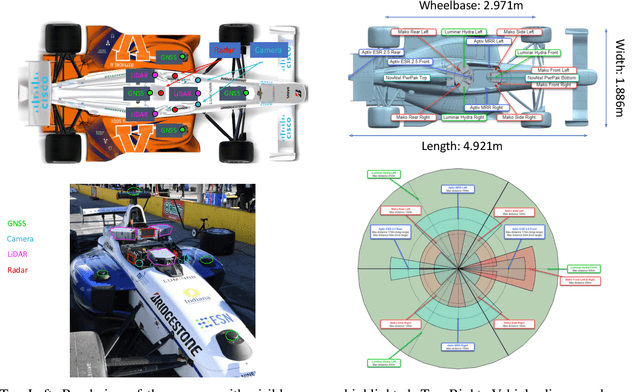
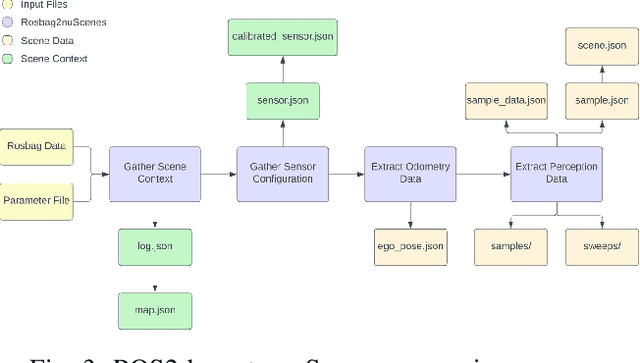
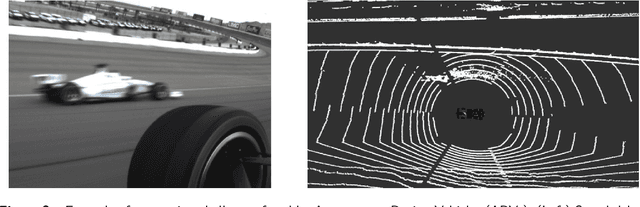
This paper describes the first open dataset for full-scale and high-speed autonomous racing. Multi-modal sensor data has been collected from fully autonomous Indy race cars operating at speeds of up to 170 mph (273 kph). Six teams who raced in the Indy Autonomous Challenge have contributed to this dataset. The dataset spans 11 interesting racing scenarios across two race tracks which include solo laps, multi-agent laps, overtaking situations, high-accelerations, banked tracks, obstacle avoidance, pit entry and exit at different speeds. The dataset contains data from 27 racing sessions across the 11 scenarios with over 6.5 hours of sensor data recorded from the track. The data is organized and released in both ROS2 and nuScenes format. We have also developed the ROS2-to-nuScenes conversion library to achieve this. The RACECAR data is unique because of the high-speed environment of autonomous racing. We present several benchmark problems on localization, object detection and tracking (LiDAR, Radar, and Camera), and mapping using the RACECAR data to explore issues that arise at the limits of operation of the vehicle.
Robust Modeling and Controls for Racing on the Edge
May 22, 2022
Race cars are routinely driven to the edge of their handling limits in dynamic scenarios well above 200mph. Similar challenges are posed in autonomous racing, where a software stack, instead of a human driver, interacts within a multi-agent environment. For an Autonomous Racing Vehicle (ARV), operating at the edge of handling limits and acting safely in these dynamic environments is still an unsolved problem. In this paper, we present a baseline controls stack for an ARV capable of operating safely up to 140mph. Additionally, limitations in the current approach are discussed to highlight the need for improved dynamics modeling and learning.
Carnegie Mellon Team Tartan: Mission-level Robustness with Rapidly Deployed Autonomous Aerial Vehicles in the MBZIRC 2020
Jul 03, 2021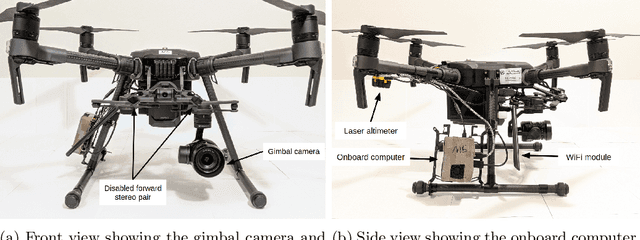

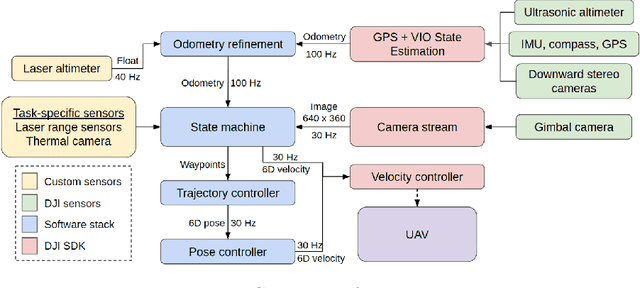
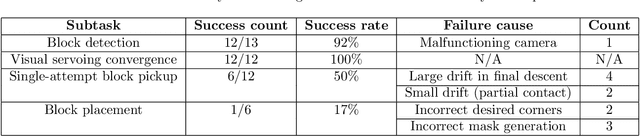
For robotics systems to be used in high risk, real-world situations, they have to be quickly deployable and robust to environmental changes, under-performing hardware, and mission subtask failures. Robots are often designed to consider a single sequence of mission events, with complex algorithms lowering individual subtask failure rates under some critical constraints. Our approach is to leverage common techniques in vision and control and encode robustness into mission structure through outcome monitoring and recovery strategies, aided by a system infrastructure that allows for quick mission deployments under tight time constraints and no central communication. We also detail lessons in rapid field robotics development and testing. Systems were developed and evaluated through real-robot experiments at an outdoor test site in Pittsburgh, Pennsylvania, USA, as well as in the 2020 Mohamed Bin Zayed International Robotics Challenge. All competition trials were completed in fully autonomous mode without RTK-GPS. Our system led to 4th place in Challenge 2 and 7th place in the Grand Challenge, and achievements like popping five balloons (Challenge 1), successfully picking and placing a block (Challenge 2), and dispensing the most water autonomously with a UAV of all teams onto an outdoor, real fire (Challenge 3).