 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBETTY Dataset: A Multi-modal Dataset for Full-Stack Autonomy
May 12, 2025We present the BETTY dataset, a large-scale, multi-modal dataset collected on several autonomous racing vehicles, targeting supervised and self-supervised state estimation, dynamics modeling, motion forecasting, perception, and more. Existing large-scale datasets, especially autonomous vehicle datasets, focus primarily on supervised perception, planning, and motion forecasting tasks. Our work enables multi-modal, data-driven methods by including all sensor inputs and the outputs from the software stack, along with semantic metadata and ground truth information. The dataset encompasses 4 years of data, currently comprising over 13 hours and 32TB, collected on autonomous racing vehicle platforms. This data spans 6 diverse racing environments, including high-speed oval courses, for single and multi-agent algorithm evaluation in feature-sparse scenarios, as well as high-speed road courses with high longitudinal and lateral accelerations and tight, GPS-denied environments. It captures highly dynamic states, such as 63 m/s crashes, loss of tire traction, and operation at the limit of stability. By offering a large breadth of cross-modal and dynamic data, the BETTY dataset enables the training and testing of full autonomy stack pipelines, pushing the performance of all algorithms to the limits. The current dataset is available at https://pitt-mit-iac.github.io/betty-dataset/.
SALON: Self-supervised Adaptive Learning for Off-road Navigation
Dec 10, 2024



Autonomous robot navigation in off-road environments presents a number of challenges due to its lack of structure, making it difficult to handcraft robust heuristics for diverse scenarios. While learned methods using hand labels or self-supervised data improve generalizability, they often require a tremendous amount of data and can be vulnerable to domain shifts. To improve generalization in novel environments, recent works have incorporated adaptation and self-supervision to develop autonomous systems that can learn from their own experiences online. However, current works often rely on significant prior data, for example minutes of human teleoperation data for each terrain type, which is difficult to scale with more environments and robots. To address these limitations, we propose SALON, a perception-action framework for fast adaptation of traversability estimates with minimal human input. SALON rapidly learns online from experience while avoiding out of distribution terrains to produce adaptive and risk-aware cost and speed maps. Within seconds of collected experience, our results demonstrate comparable navigation performance over kilometer-scale courses in diverse off-road terrain as methods trained on 100-1000x more data. We additionally show promising results on significantly different robots in different environments. Our code is available at https://theairlab.org/SALON.
Fast and Modular Autonomy Software for Autonomous Racing Vehicles
Aug 27, 2024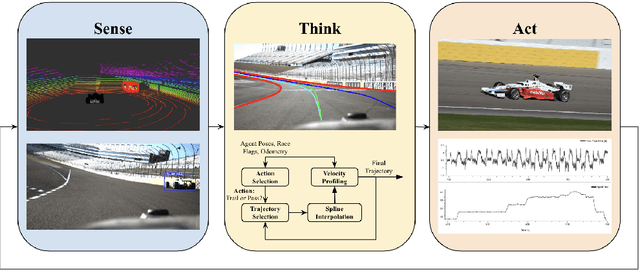


Autonomous motorsports aim to replicate the human racecar driver with software and sensors. As in traditional motorsports, Autonomous Racing Vehicles (ARVs) are pushed to their handling limits in multi-agent scenarios at extremely high ($\geq 150mph$) speeds. This Operational Design Domain (ODD) presents unique challenges across the autonomy stack. The Indy Autonomous Challenge (IAC) is an international competition aiming to advance autonomous vehicle development through ARV competitions. While far from challenging what a human racecar driver can do, the IAC is pushing the state of the art by facilitating full-sized ARV competitions. This paper details the MIT-Pitt-RW Team's approach to autonomous racing in the IAC. In this work, we present our modular and fast approach to agent detection, motion planning and controls to create an autonomy stack. We also provide analysis of the performance of the software stack in single and multi-agent scenarios for rapid deployment in a fast-paced competition environment. We also cover what did and did not work when deployed on a physical system the Dallara AV-21 platform and potential improvements to address these shortcomings. Finally, we convey lessons learned and discuss limitations and future directions for improvement.
* Published in Journal of Field Robotics
Deep Bayesian Future Fusion for Self-Supervised, High-Resolution, Off-Road Mapping
Mar 18, 2024



The limited sensing resolution of resource-constrained off-road vehicles poses significant challenges towards reliable off-road autonomy. To overcome this limitation, we propose a general framework based on fusing the future information (i.e. future fusion) for self-supervision. Recent approaches exploit this future information alongside the hand-crafted heuristics to directly supervise the targeted downstream tasks (e.g. traversability estimation). However, in this paper, we opt for a more general line of development - time-efficient completion of the highest resolution (i.e. 2cm per pixel) BEV map in a self-supervised manner via future fusion, which can be used for any downstream tasks for better longer range prediction. To this end, first, we create a high-resolution future-fusion dataset containing pairs of (RGB / height) raw sparse and noisy inputs and map-based dense labels. Next, to accommodate the noise and sparsity of the sensory information, especially in the distal regions, we design an efficient realization of the Bayes filter onto the vanilla convolutional network via the recurrent mechanism. Equipped with the ideas from SOTA generative models, our Bayesian structure effectively predicts high-quality BEV maps in the distal regions. Extensive evaluation on both the quality of completion and downstream task on our future-fusion dataset demonstrates the potential of our approach.
TartanDrive 2.0: More Modalities and Better Infrastructure to Further Self-Supervised Learning Research in Off-Road Driving Tasks
Feb 02, 2024
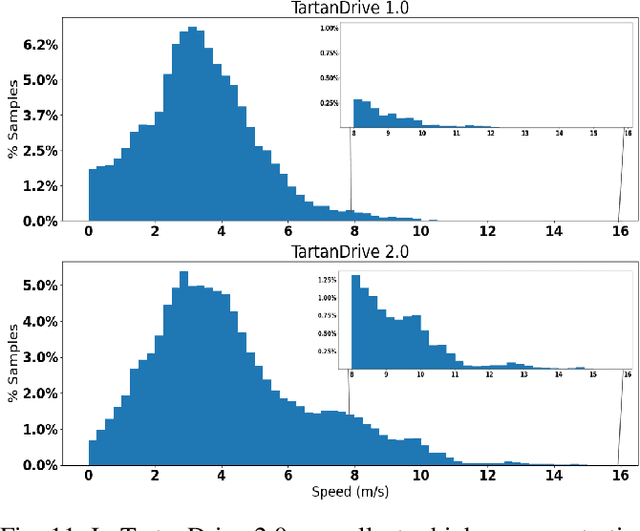


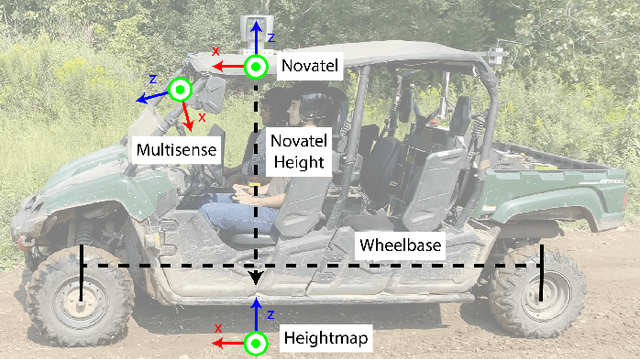
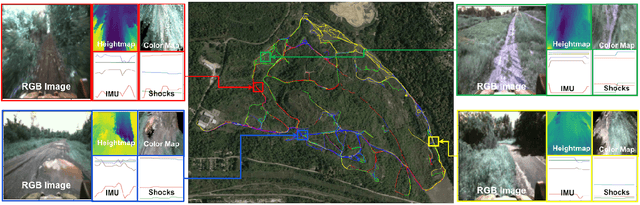
We present TartanDrive 2.0, a large-scale off-road driving dataset for self-supervised learning tasks. In 2021 we released TartanDrive 1.0, which is one of the largest datasets for off-road terrain. As a follow-up to our original dataset, we collected seven hours of data at speeds of up to 15m/s with the addition of three new LiDAR sensors alongside the original camera, inertial, GPS, and proprioceptive sensors. We also release the tools we use for collecting, processing, and querying the data, including our metadata system designed to further the utility of our data. Custom infrastructure allows end users to reconfigure the data to cater to their own platforms. These tools and infrastructure alongside the dataset are useful for a variety of tasks in the field of off-road autonomy and, by releasing them, we encourage collaborative data aggregation. These resources lower the barrier to entry to utilizing large-scale datasets, thereby helping facilitate the advancement of robotics in areas such as self-supervised learning, multi-modal perception, inverse reinforcement learning, and representation learning. The dataset is available at https://github.com/castacks/tartan drive 2.0.
PIAug -- Physics Informed Augmentation for Learning Vehicle Dynamics for Off-Road Navigation
Nov 01, 2023



Modeling the precise dynamics of off-road vehicles is a complex yet essential task due to the challenging terrain they encounter and the need for optimal performance and safety. Recently, there has been a focus on integrating nominal physics-based models alongside data-driven neural networks using Physics Informed Neural Networks. These approaches often assume the availability of a well-distributed dataset; however, this assumption may not hold due to regions in the physical distribution that are hard to collect, such as high-speed motions and rare terrains. Therefore, we introduce a physics-informed data augmentation methodology called PIAug. We show an example use case of the same by modeling high-speed and aggressive motion predictions, given a dataset with only low-speed data. During the training phase, we leverage the nominal model for generating target domain (medium and high velocity) data using the available source data (low velocity). Subsequently, we employ a physics-inspired loss function with this augmented dataset to incorporate prior knowledge of physics into the neural network. Our methodology results in up to 67% less mean error in trajectory prediction in comparison to a standalone nominal model, especially during aggressive maneuvers at speeds outside the training domain. In real-life navigation experiments, our model succeeds in 4x tighter waypoint tracking constraints than the Kinematic Bicycle Model (KBM) at out-of-domain velocities.
Learning Risk-Aware Costmaps via Inverse Reinforcement Learning for Off-Road Navigation
Jan 31, 2023The process of designing costmaps for off-road driving tasks is often a challenging and engineering-intensive task. Recent work in costmap design for off-road driving focuses on training deep neural networks to predict costmaps from sensory observations using corpora of expert driving data. However, such approaches are generally subject to over-confident mispredictions and are rarely evaluated in-the-loop on physical hardware. We present an inverse reinforcement learning-based method of efficiently training deep cost functions that are uncertainty-aware. We do so by leveraging recent advances in highly parallel model-predictive control and robotic risk estimation. In addition to demonstrating improvement at reproducing expert trajectories, we also evaluate the efficacy of these methods in challenging off-road navigation scenarios. We observe that our method significantly outperforms a geometric baseline, resulting in 44% improvement in expert path reconstruction and 57% fewer interventions in practice. We also observe that varying the risk tolerance of the vehicle results in qualitatively different navigation behaviors, especially with respect to higher-risk scenarios such as slopes and tall grass.
TartanDrive: A Large-Scale Dataset for Learning Off-Road Dynamics Models
May 03, 2022
We present TartanDrive, a large scale dataset for learning dynamics models for off-road driving. We collected a dataset of roughly 200,000 off-road driving interactions on a modified Yamaha Viking ATV with seven unique sensing modalities in diverse terrains. To the authors' knowledge, this is the largest real-world multi-modal off-road driving dataset, both in terms of number of interactions and sensing modalities. We also benchmark several state-of-the-art methods for model-based reinforcement learning from high-dimensional observations on this dataset. We find that extending these models to multi-modality leads to significant performance on off-road dynamics prediction, especially in more challenging terrains. We also identify some shortcomings with current neural network architectures for the off-road driving task. Our dataset is available at https://github.com/castacks/tartan_drive.