 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTemporally-Sampled Efficiently Adaptive State Lattices for Autonomous Ground Robot Navigation in Partially Observed Environments
Feb 13, 2026Due to sensor limitations, environments that off-road mobile robots operate in are often only partially observable. As the robots move throughout the environment and towards their goal, the optimal route is continuously revised as the sensors perceive new information. In traditional autonomous navigation architectures, a regional motion planner will consume the environment map and output a trajectory for the local motion planner to use as a reference. Due to the continuous revision of the regional plan guidance as a result of changing map information, the reference trajectories which are passed down to the local planner can differ significantly across sequential planning cycles. This rapidly changing guidance can result in unsafe navigation behavior, often requiring manual safety interventions during autonomous traversals in off-road environments. To remedy this problem, we propose Temporally-Sampled Efficiently Adaptive State Lattices (TSEASL), which is a regional planner arbitration architecture that considers updated and optimized versions of previously generated trajectories against the currently generated trajectory. When tested on a Clearpath Robotics Warthog Unmanned Ground Vehicle as well as real map data collected from the Warthog, results indicate that when running TSEASL, the robot did not require manual interventions in the same locations where the robot was running the baseline planner. Additionally, higher levels of planner stability were recorded with TSEASL over the baseline. The paper concludes with a discussion of further improvements to TSEASL in order to make it more generalizable to various off-road autonomy scenarios.
Navigating the Wild: Pareto-Optimal Visual Decision-Making in Image Space
Nov 11, 2025Navigating complex real-world environments requires semantic understanding and adaptive decision-making. Traditional reactive methods without maps often fail in cluttered settings, map-based approaches demand heavy mapping effort, and learning-based solutions rely on large datasets with limited generalization. To address these challenges, we present Pareto-Optimal Visual Navigation, a lightweight image-space framework that combines data-driven semantics, Pareto-optimal decision-making, and visual servoing for real-time navigation.
Trailblazer: Learning offroad costmaps for long range planning
May 14, 2025Autonomous navigation in off-road environments remains a significant challenge in field robotics, particularly for Unmanned Ground Vehicles (UGVs) tasked with search and rescue, exploration, and surveillance. Effective long-range planning relies on the integration of onboard perception systems with prior environmental knowledge, such as satellite imagery and LiDAR data. This work introduces Trailblazer, a novel framework that automates the conversion of multi-modal sensor data into costmaps, enabling efficient path planning without manual tuning. Unlike traditional approaches, Trailblazer leverages imitation learning and a differentiable A* planner to learn costmaps directly from expert demonstrations, enhancing adaptability across diverse terrains. The proposed methodology was validated through extensive real-world testing, achieving robust performance in dynamic and complex environments, demonstrating Trailblazer's potential for scalable, efficient autonomous navigation.
Terrain-Aware Kinodynamic Planning with Efficiently Adaptive State Lattices for Mobile Robot Navigation in Off-Road Environments
Apr 24, 2025To safely traverse non-flat terrain, robots must account for the influence of terrain shape in their planned motions. Terrain-aware motion planners use an estimate of the vehicle roll and pitch as a function of pose, vehicle suspension, and ground elevation map to weigh the cost of edges in the search space. Encoding such information in a traditional two-dimensional cost map is limiting because it is unable to capture the influence of orientation on the roll and pitch estimates from sloped terrain. The research presented herein addresses this problem by encoding kinodynamic information in the edges of a recombinant motion planning search space based on the Efficiently Adaptive State Lattice (EASL). This approach, which we describe as a Kinodynamic Efficiently Adaptive State Lattice (KEASL), differs from the prior representation in two ways. First, this method uses a novel encoding of velocity and acceleration constraints and vehicle direction at expanded nodes in the motion planning graph. Second, this approach describes additional steps for evaluating the roll, pitch, constraints, and velocities associated with poses along each edge during search in a manner that still enables the graph to remain recombinant. Velocities are computed using an iterative bidirectional method using Eulerian integration that more accurately estimates the duration of edges that are subject to terrain-dependent velocity limits. Real-world experiments on a Clearpath Robotics Warthog Unmanned Ground Vehicle were performed in a non-flat, unstructured environment. Results from 2093 planning queries from these experiments showed that KEASL provided a more efficient route than EASL in 83.72% of cases when EASL plans were adjusted to satisfy terrain-dependent velocity constraints. An analysis of relative runtimes and differences between planned routes is additionally presented.
* 8 page paper with 1 additional copyright page. Published at the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Boundary-Aware Value Function Generation for Safe Stochastic Motion Planning
Mar 22, 2024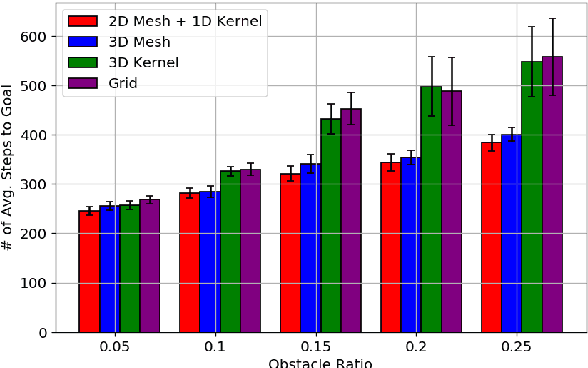
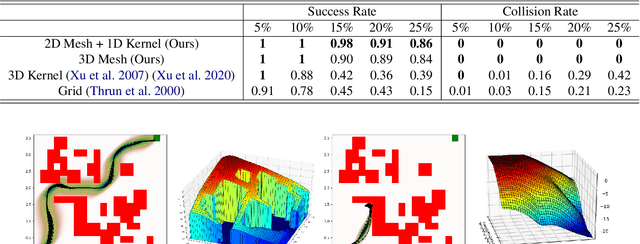
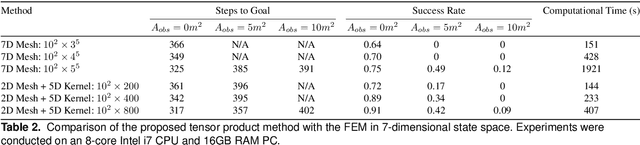
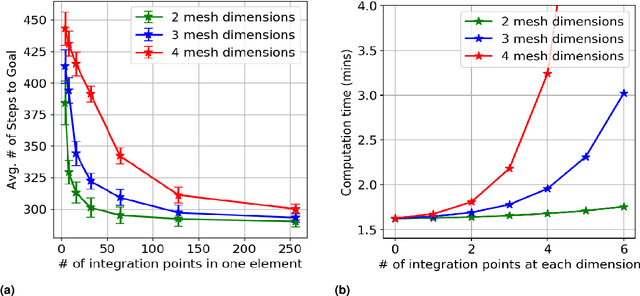
Navigation safety is critical for many autonomous systems such as self-driving vehicles in an urban environment. It requires an explicit consideration of boundary constraints that describe the borders of any infeasible, non-navigable, or unsafe regions. We propose a principled boundary-aware safe stochastic planning framework with promising results. Our method generates a value function that can strictly distinguish the state values between free (safe) and non-navigable (boundary) spaces in the continuous state, naturally leading to a safe boundary-aware policy. At the core of our solution lies a seamless integration of finite elements and kernel-based functions, where the finite elements allow us to characterize safety-critical states' borders accurately, and the kernel-based function speeds up computation for the non-safety-critical states. The proposed method was evaluated through extensive simulations and demonstrated safe navigation behaviors in mobile navigation tasks. Additionally, we demonstrate that our approach can maneuver safely and efficiently in cluttered real-world environments using a ground vehicle with strong external disturbances, such as navigating on a slippery floor and against external human intervention.
Deep Bayesian Future Fusion for Self-Supervised, High-Resolution, Off-Road Mapping
Mar 18, 2024



The limited sensing resolution of resource-constrained off-road vehicles poses significant challenges towards reliable off-road autonomy. To overcome this limitation, we propose a general framework based on fusing the future information (i.e. future fusion) for self-supervision. Recent approaches exploit this future information alongside the hand-crafted heuristics to directly supervise the targeted downstream tasks (e.g. traversability estimation). However, in this paper, we opt for a more general line of development - time-efficient completion of the highest resolution (i.e. 2cm per pixel) BEV map in a self-supervised manner via future fusion, which can be used for any downstream tasks for better longer range prediction. To this end, first, we create a high-resolution future-fusion dataset containing pairs of (RGB / height) raw sparse and noisy inputs and map-based dense labels. Next, to accommodate the noise and sparsity of the sensory information, especially in the distal regions, we design an efficient realization of the Bayes filter onto the vanilla convolutional network via the recurrent mechanism. Equipped with the ideas from SOTA generative models, our Bayesian structure effectively predicts high-quality BEV maps in the distal regions. Extensive evaluation on both the quality of completion and downstream task on our future-fusion dataset demonstrates the potential of our approach.
PIAug -- Physics Informed Augmentation for Learning Vehicle Dynamics for Off-Road Navigation
Nov 01, 2023



Modeling the precise dynamics of off-road vehicles is a complex yet essential task due to the challenging terrain they encounter and the need for optimal performance and safety. Recently, there has been a focus on integrating nominal physics-based models alongside data-driven neural networks using Physics Informed Neural Networks. These approaches often assume the availability of a well-distributed dataset; however, this assumption may not hold due to regions in the physical distribution that are hard to collect, such as high-speed motions and rare terrains. Therefore, we introduce a physics-informed data augmentation methodology called PIAug. We show an example use case of the same by modeling high-speed and aggressive motion predictions, given a dataset with only low-speed data. During the training phase, we leverage the nominal model for generating target domain (medium and high velocity) data using the available source data (low velocity). Subsequently, we employ a physics-inspired loss function with this augmented dataset to incorporate prior knowledge of physics into the neural network. Our methodology results in up to 67% less mean error in trajectory prediction in comparison to a standalone nominal model, especially during aggressive maneuvers at speeds outside the training domain. In real-life navigation experiments, our model succeeds in 4x tighter waypoint tracking constraints than the Kinematic Bicycle Model (KBM) at out-of-domain velocities.
POVNav: A Pareto-Optimal Mapless Visual Navigator
Oct 21, 2023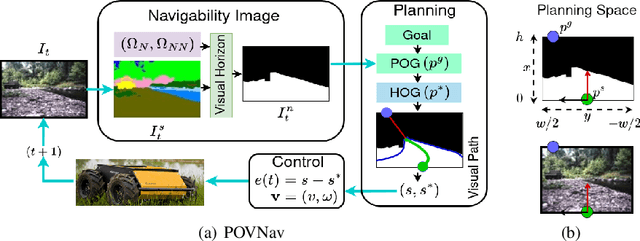
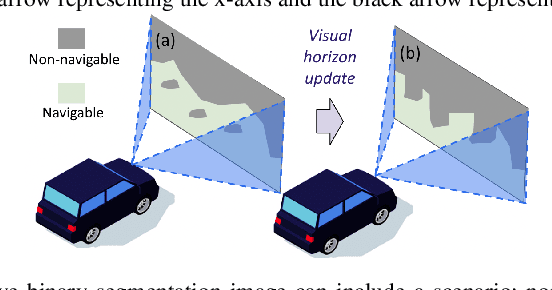
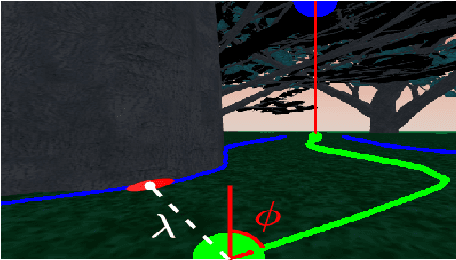
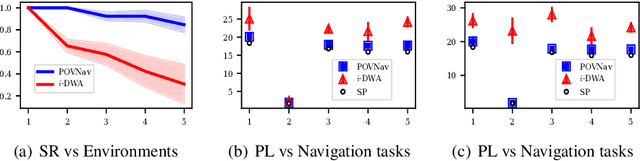
Mapless navigation has emerged as a promising approach for enabling autonomous robots to navigate in environments where pre-existing maps may be inaccurate, outdated, or unavailable. In this work, we propose an image-based local representation of the environment immediately around a robot to parse navigability. We further develop a local planning and control framework, a Pareto-optimal mapless visual navigator (POVNav), to use this representation and enable autonomous navigation in various challenging and real-world environments. In POVNav, we choose a Pareto-optimal sub-goal in the image by evaluating all the navigable pixels, finding a safe visual path, and generating actions to follow the path using visual servo control. In addition to providing collision-free motion, our approach enables selective navigation behavior, such as restricting navigation to select terrain types, by only changing the navigability definition in the local representation. The ability of POVNav to navigate a robot to the goal using only a monocular camera without relying on a map makes it computationally light and easy to implement on various robotic platforms. Real-world experiments in diverse challenging environments, ranging from structured indoor environments to unstructured outdoor environments such as forest trails and roads after a heavy snowfall, using various image segmentation techniques demonstrate the remarkable efficacy of our proposed framework.
Pseudo-Trilateral Adversarial Training for Domain Adaptive Traversability Prediction
Jun 26, 2023Traversability prediction is a fundamental perception capability for autonomous navigation. Deep neural networks (DNNs) have been widely used to predict traversability during the last decade. The performance of DNNs is significantly boosted by exploiting a large amount of data. However, the diversity of data in different domains imposes significant gaps in the prediction performance. In this work, we make efforts to reduce the gaps by proposing a novel pseudo-trilateral adversarial model that adopts a coarse-to-fine alignment (CALI) to perform unsupervised domain adaptation (UDA). Our aim is to transfer the perception model with high data efficiency, eliminate the prohibitively expensive data labeling, and improve the generalization capability during the adaptation from easy-to-access source domains to various challenging target domains. Existing UDA methods usually adopt a bilateral zero-sum game structure. We prove that our CALI model -- a pseudo-trilateral game structure is advantageous over existing bilateral game structures. This proposed work bridges theoretical analyses and algorithm designs, leading to an efficient UDA model with easy and stable training. We further develop a variant of CALI -- Informed CALI (ICALI), which is inspired by the recent success of mixup data augmentation techniques and mixes informative regions based on the results of CALI. This mixture step provides an explicit bridging between the two domains and exposes underperforming classes more during training. We show the superiorities of our proposed models over multiple baselines in several challenging domain adaptation setups. To further validate the effectiveness of our proposed models, we then combine our perception model with a visual planner to build a navigation system and show the high reliability of our model in complex natural environments.
IDA: Informed Domain Adaptive Semantic Segmentation
Mar 05, 2023Mixup-based data augmentation has been validated to be a critical stage in the self-training framework for unsupervised domain adaptive semantic segmentation (UDA-SS), which aims to transfer knowledge from a well-annotated (source) domain to an unlabeled (target) domain. Existing self-training methods usually adopt the popular region-based mixup techniques with a random sampling strategy, which unfortunately ignores the dynamic evolution of different semantics across various domains as training proceeds. To improve the UDA-SS performance, we propose an Informed Domain Adaptation (IDA) model, a self-training framework that mixes the data based on class-level segmentation performance, which aims to emphasize small-region semantics during mixup. In our IDA model, the class-level performance is tracked by an expected confidence score (ECS). We then use a dynamic schedule to determine the mixing ratio for data in different domains. Extensive experimental results reveal that our proposed method is able to outperform the state-of-the-art UDA-SS method by a margin of 1.1 mIoU in the adaptation of GTA-V to Cityscapes and of 0.9 mIoU in the adaptation of SYNTHIA to Cityscapes.