 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePushing Radar Odometry Beyond the Pavement: Current Capabilities and Challenges
Apr 27, 2026Radar offers unique advantages for localization in unstructured environments, including robustness to weather, lighting, and airborne particulates. While most prior work has studied radar odometry in urban, largely planar settings, its performance in off-road environments remains less understood. In this paper, we investigate the potential of radar for off-road odometry estimation and identify key challenges that arise from full $SE(3)$ vehicle motion, terrain-induced ground returns, and sparse or unstable features. To address these issues, we introduce two simple baselines: Radar-KISSICP, which applies motion compensation to generate 3D-aware radar pointclouds, and Radar-IMU, which leverages IMU preintegration to stabilize scan matching. Experiments on the Great Outdoors (GO) dataset demonstrate that these baselines improve trajectory estimation in challenging routes and provide a reference point for future development of radar odometry in off-road robotics.
Trailblazer: Learning offroad costmaps for long range planning
May 14, 2025Autonomous navigation in off-road environments remains a significant challenge in field robotics, particularly for Unmanned Ground Vehicles (UGVs) tasked with search and rescue, exploration, and surveillance. Effective long-range planning relies on the integration of onboard perception systems with prior environmental knowledge, such as satellite imagery and LiDAR data. This work introduces Trailblazer, a novel framework that automates the conversion of multi-modal sensor data into costmaps, enabling efficient path planning without manual tuning. Unlike traditional approaches, Trailblazer leverages imitation learning and a differentiable A* planner to learn costmaps directly from expert demonstrations, enhancing adaptability across diverse terrains. The proposed methodology was validated through extensive real-world testing, achieving robust performance in dynamic and complex environments, demonstrating Trailblazer's potential for scalable, efficient autonomous navigation.
GO: The Great Outdoors Multimodal Dataset
Jan 31, 2025



The Great Outdoors (GO) dataset is a multi-modal annotated data resource aimed at advancing ground robotics research in unstructured environments. This dataset provides the most comprehensive set of data modalities and annotations compared to existing off-road datasets. In total, the GO dataset includes six unique sensor types with high-quality semantic annotations and GPS traces to support tasks such as semantic segmentation, object detection, and SLAM. The diverse environmental conditions represented in the dataset present significant real-world challenges that provide opportunities to develop more robust solutions to support the continued advancement of field robotics, autonomous exploration, and perception systems in natural environments. The dataset can be downloaded at: https://www.unmannedlab.org/the-great-outdoors-dataset/
Radar-Only Off-Road Local Navigation
Oct 26, 2023Off-road robotics have traditionally utilized lidar for local navigation due to its accuracy and high resolution. However, the limitations of lidar, such as reduced performance in harsh environmental conditions and limited range, have prompted the exploration of alternative sensing technologies. This paper investigates the potential of radar for off-road local navigation, as it offers the advantages of a longer range and the ability to penetrate dust and light vegetation. We adapt existing lidar-based methods for radar and evaluate the performance in comparison to lidar under various off-road conditions. We show that radar can provide a significant range advantage over lidar while maintaining accuracy for both ground plane estimation and obstacle detection. And finally, we demonstrate successful autonomous navigation at a speed of 2.5 m/s over a path length of 350 m using only radar for ground plane estimation and obstacle detection.
G-VOM: A GPU Accelerated Voxel Off-Road Mapping System
Sep 27, 2021



We present a local 3D voxel mapping framework for off-road path planning and navigation. Our method provides both hard and soft positive obstacle detection, negative obstacle detection, slope estimation, and roughness estimation. By using a 3D array lookup table data structure and by leveraging the GPU it can provide online performance. We then demonstrate the system working on three vehicles, a Clearpath Robotics Warthog, Moose, and a Polaris Ranger, and compare against a set of pre-recorded waypoints. This was done at 4.5 m/s in autonomous operation and 12 m/s in manual operation with a map update rate of 10 Hz. Finally, an open-source ROS implementation is provided. https://github.com/unmannedlab/G-VOM
Path Optimization for Ground Vehicles in Off-Road Terrain
Jan 04, 2021
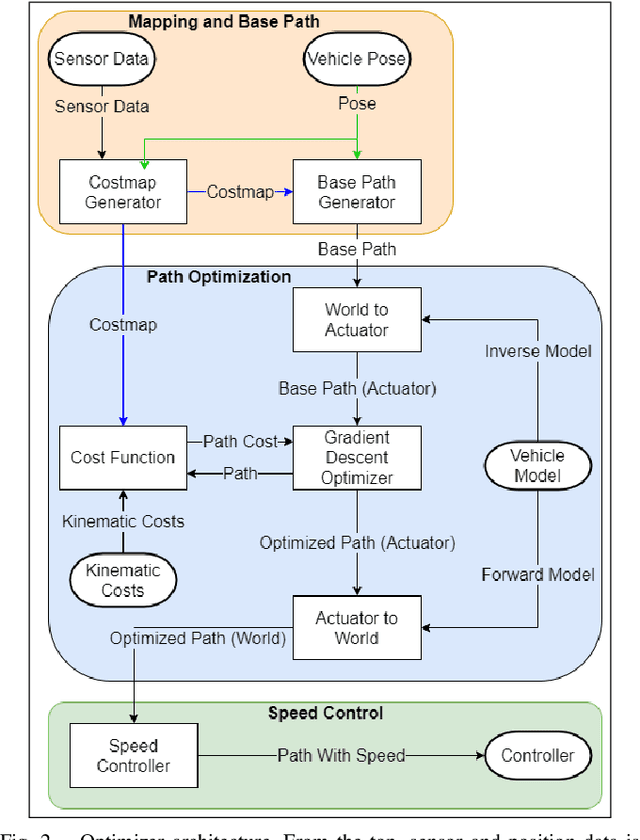
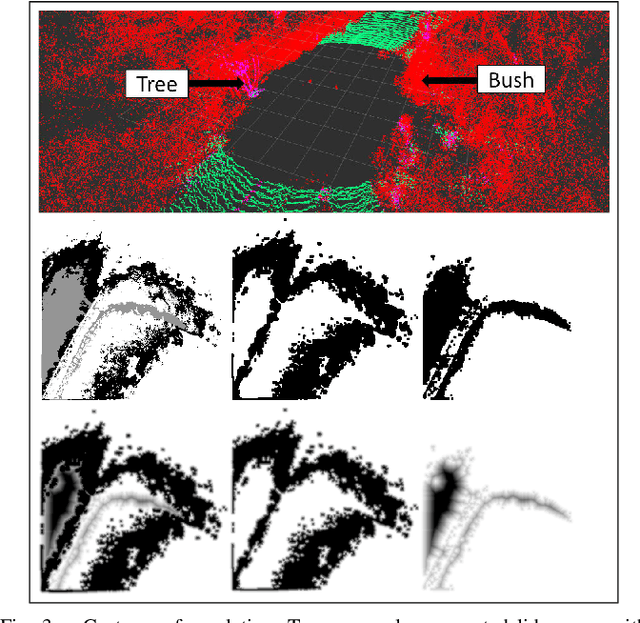
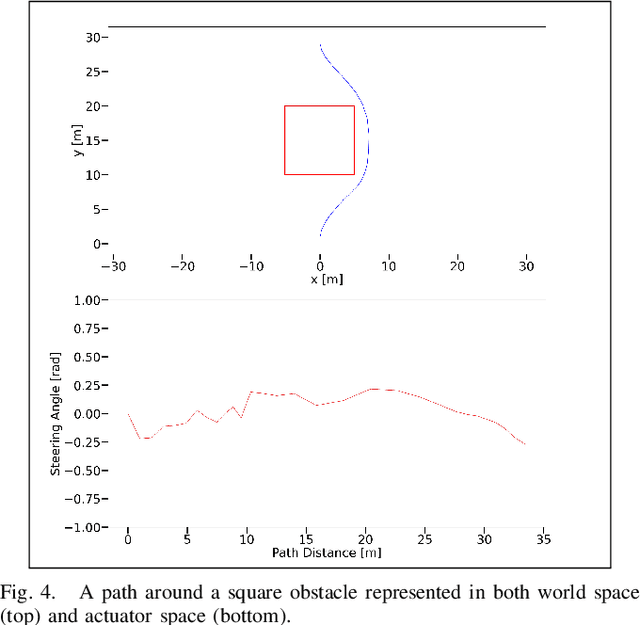
We present a method for path optimization for ground vehicles in off-road environments at high speeds. This path optimization considers the kinematic constraints of the vehicle. By thinking in the actuator space we can represent these constraints as limits in the space rather than derived properties of the path. In this paper we present a actuator space approach to path optimization for off-road ground vehicles. This is done by representing and operation on the path as a list of steering angles over the path length. This transforms the set of kinematic constraints into constraints on the steering angle. We then put this path into a gradient descent solver. This produced paths that are kinematically feasible and optimized in accordance with our cost function. Finally, we tested the system both in simulation and on an off-road vehicle at speeds of 5 m/s.
Fast Local Planning and Mapping in Unknown Off-Road Terrain
Oct 18, 2019



In this paper, we present a fast, on-line mapping and planning solution for operation in unknown, off-road, environments. We combine obstacle detection along with a terrain gradient map to make simple and adaptable cost map. This map can be created and updated at 10 Hz. An A* planner finds optimal paths over the map. Finally, we take multiple samples over the control input space and do a kinematic forward simulation to generated feasible trajectories. Then the most optimal trajectory, as determined by the cost map and proximity to A* path, is chosen and sent to the controller. Our method allows real time operation at rates of 30 Hz. We demonstrate the efficiency of our method in various off-road terrain at high speed.