 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePath Optimization for Ground Vehicles in Off-Road Terrain
Paper and Code
Jan 04, 2021
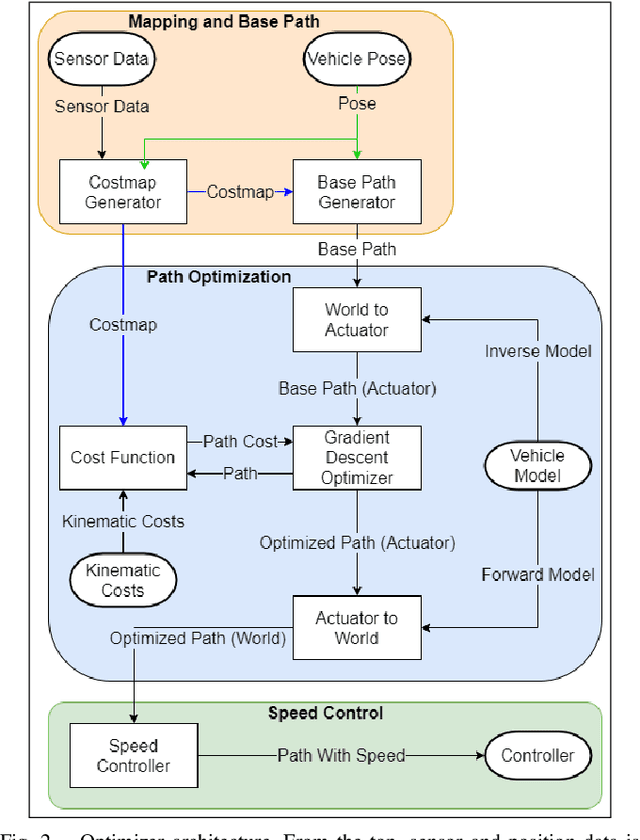
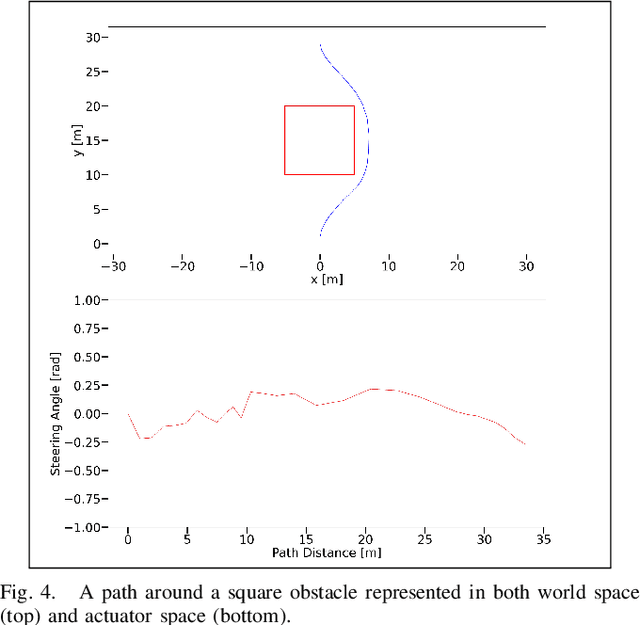
We present a method for path optimization for ground vehicles in off-road environments at high speeds. This path optimization considers the kinematic constraints of the vehicle. By thinking in the actuator space we can represent these constraints as limits in the space rather than derived properties of the path. In this paper we present a actuator space approach to path optimization for off-road ground vehicles. This is done by representing and operation on the path as a list of steering angles over the path length. This transforms the set of kinematic constraints into constraints on the steering angle. We then put this path into a gradient descent solver. This produced paths that are kinematically feasible and optimized in accordance with our cost function. Finally, we tested the system both in simulation and on an off-road vehicle at speeds of 5 m/s.