 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrailblazer: Learning offroad costmaps for long range planning
May 14, 2025Autonomous navigation in off-road environments remains a significant challenge in field robotics, particularly for Unmanned Ground Vehicles (UGVs) tasked with search and rescue, exploration, and surveillance. Effective long-range planning relies on the integration of onboard perception systems with prior environmental knowledge, such as satellite imagery and LiDAR data. This work introduces Trailblazer, a novel framework that automates the conversion of multi-modal sensor data into costmaps, enabling efficient path planning without manual tuning. Unlike traditional approaches, Trailblazer leverages imitation learning and a differentiable A* planner to learn costmaps directly from expert demonstrations, enhancing adaptability across diverse terrains. The proposed methodology was validated through extensive real-world testing, achieving robust performance in dynamic and complex environments, demonstrating Trailblazer's potential for scalable, efficient autonomous navigation.
GO: The Great Outdoors Multimodal Dataset
Jan 31, 2025



The Great Outdoors (GO) dataset is a multi-modal annotated data resource aimed at advancing ground robotics research in unstructured environments. This dataset provides the most comprehensive set of data modalities and annotations compared to existing off-road datasets. In total, the GO dataset includes six unique sensor types with high-quality semantic annotations and GPS traces to support tasks such as semantic segmentation, object detection, and SLAM. The diverse environmental conditions represented in the dataset present significant real-world challenges that provide opportunities to develop more robust solutions to support the continued advancement of field robotics, autonomous exploration, and perception systems in natural environments. The dataset can be downloaded at: https://www.unmannedlab.org/the-great-outdoors-dataset/
Reflectivity Is All You Need!: Advancing LiDAR Semantic Segmentation
Mar 19, 2024



LiDAR semantic segmentation frameworks predominantly leverage geometry-based features to differentiate objects within a scan. While these methods excel in scenarios with clear boundaries and distinct shapes, their performance declines in environments where boundaries are blurred, particularly in off-road contexts. To address this, recent strides in 3D segmentation algorithms have focused on harnessing raw LiDAR intensity measurements to improve prediction accuracy. Despite these efforts, current learning-based models struggle to correlate the intricate connections between raw intensity and factors such as distance, incidence angle, material reflectivity, and atmospheric conditions. Building upon our prior work, this paper delves into the advantages of employing calibrated intensity (also referred to as reflectivity) within learning-based LiDAR semantic segmentation frameworks. We initially establish that incorporating reflectivity as an input enhances the existing LiDAR semantic segmentation model. Furthermore, we present findings that enable the model to learn to calibrate intensity can boost its performance. Through extensive experimentation on the off-road dataset Rellis-3D, we demonstrate notable improvements. Specifically, converting intensity to reflectivity results in a 4% increase in mean Intersection over Union (mIoU) when compared to using raw intensity in Off-road scenarios. Additionally, we also investigate the possible benefits of using calibrated intensity in semantic segmentation in urban environments (SemanticKITTI) and cross-sensor domain adaptation.
Off-Road LiDAR Intensity Based Semantic Segmentation
Jan 02, 2024LiDAR is used in autonomous driving to provide 3D spatial information and enable accurate perception in off-road environments, aiding in obstacle detection, mapping, and path planning. Learning-based LiDAR semantic segmentation utilizes machine learning techniques to automatically classify objects and regions in LiDAR point clouds. Learning-based models struggle in off-road environments due to the presence of diverse objects with varying colors, textures, and undefined boundaries, which can lead to difficulties in accurately classifying and segmenting objects using traditional geometric-based features. In this paper, we address this problem by harnessing the LiDAR intensity parameter to enhance object segmentation in off-road environments. Our approach was evaluated in the RELLIS-3D data set and yielded promising results as a preliminary analysis with improved mIoU for classes "puddle" and "grass" compared to more complex deep learning-based benchmarks. The methodology was evaluated for compatibility across both Velodyne and Ouster LiDAR systems, assuring its cross-platform applicability. This analysis advocates for the incorporation of calibrated intensity as a supplementary input, aiming to enhance the prediction accuracy of learning based semantic segmentation frameworks. https://github.com/MOONLABIISERB/lidar-intensity-predictor/tree/main
OFFSEG: A Semantic Segmentation Framework For Off-Road Driving
Mar 23, 2021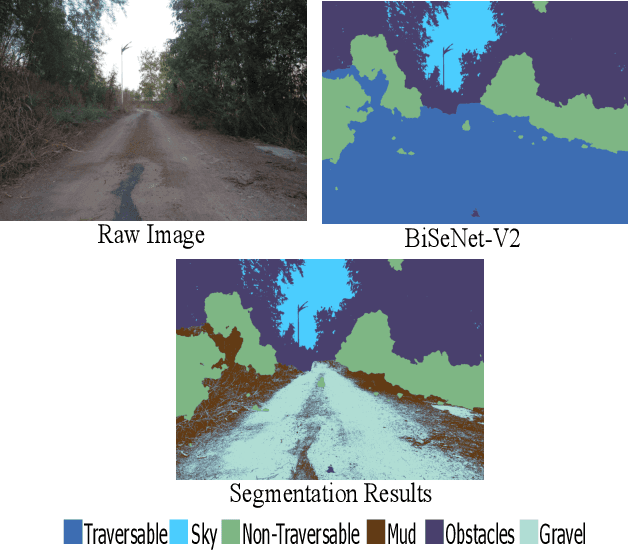
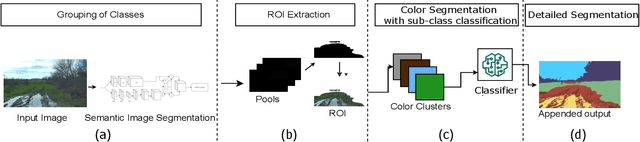
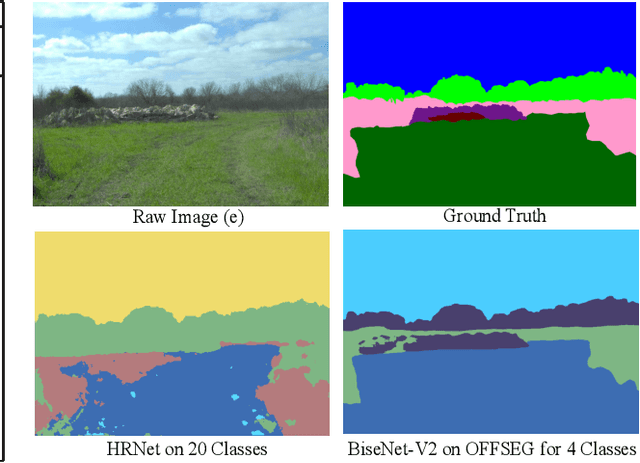
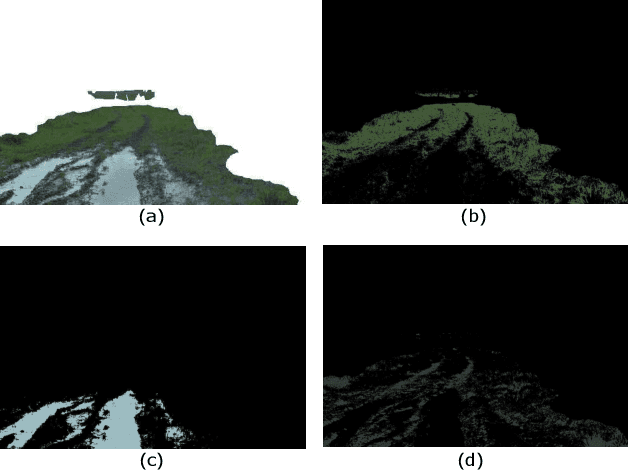
Off-road image semantic segmentation is challenging due to the presence of uneven terrains, unstructured class boundaries, irregular features and strong textures. These aspects affect the perception of the vehicle from which the information is used for path planning. Current off-road datasets exhibit difficulties like class imbalance and understanding of varying environmental topography. To overcome these issues we propose a framework for off-road semantic segmentation called as OFFSEG that involves (i) a pooled class semantic segmentation with four classes (sky, traversable region, non-traversable region and obstacle) using state-of-the-art deep learning architectures (ii) a colour segmentation methodology to segment out specific sub-classes (grass, puddle, dirt, gravel, etc.) from the traversable region for better scene understanding. The evaluation of the framework is carried out on two off-road driving datasets, namely, RELLIS-3D and RUGD. We have also tested proposed framework in IISERB campus frames. The results show that OFFSEG achieves good performance and also provides detailed information on the traversable region.