 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGO: The Great Outdoors Multimodal Dataset
Jan 31, 2025



The Great Outdoors (GO) dataset is a multi-modal annotated data resource aimed at advancing ground robotics research in unstructured environments. This dataset provides the most comprehensive set of data modalities and annotations compared to existing off-road datasets. In total, the GO dataset includes six unique sensor types with high-quality semantic annotations and GPS traces to support tasks such as semantic segmentation, object detection, and SLAM. The diverse environmental conditions represented in the dataset present significant real-world challenges that provide opportunities to develop more robust solutions to support the continued advancement of field robotics, autonomous exploration, and perception systems in natural environments. The dataset can be downloaded at: https://www.unmannedlab.org/the-great-outdoors-dataset/
ROOAD: RELLIS Off-road Odometry Analysis Dataset
Sep 16, 2021
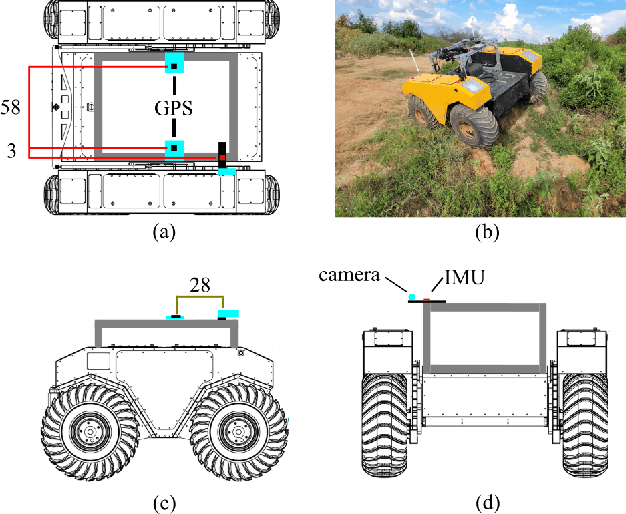
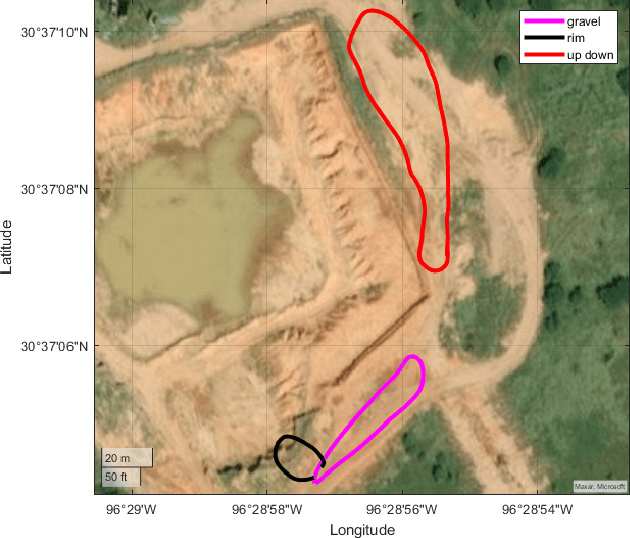
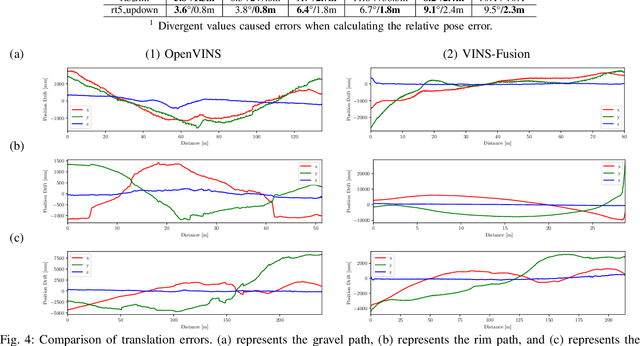
The development and implementation of visual-inertial odometry (VIO) has focused on structured environments, but interest in localization in off-road environments is growing. In this paper, we present the ROOAD which provides high-quality, time-synchronized off-road monocular visual-inertial data sequences to further the development of related research. We exhibit the 2-30x worse performance of two established VIO implementations, OpenVINS and VINS-Fusion, when stable, and the former is less prone to estimation divergences on our data sequences. The accuracy and repeatability of Kalibr's IMU-camera extrinsics calibration tool is measured to be +/-1 degrees for orientation and +/-1mm at best (left-right) and +/-10mm (depth) at worse for position estimation in the camera frame. This novel dataset provides a new set of scenarios for researchers to design and test their localization algorithms on, as well as critical insights in the current performance of VIO off-road. ROOAD Dataset: github.com/unmannedlab/ROOAD