 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnyThermal: Towards Learning Universal Representations for Thermal Perception
Feb 05, 2026We present AnyThermal, a thermal backbone that captures robust task-agnostic thermal features suitable for a variety of tasks such as cross-modal place recognition, thermal segmentation, and monocular depth estimation using thermal images. Existing thermal backbones that follow task-specific training from small-scale data result in utility limited to a specific environment and task. Unlike prior methods, AnyThermal can be used for a wide range of environments (indoor, aerial, off-road, urban) and tasks, all without task-specific training. Our key insight is to distill the feature representations from visual foundation models such as DINOv2 into a thermal encoder using thermal data from these multiple environments. To bridge the diversity gap of the existing RGB-Thermal datasets, we introduce the TartanRGBT platform, the first open-source data collection platform with synced RGB-Thermal image acquisition. We use this payload to collect the TartanRGBT dataset - a diverse and balanced dataset collected in 4 environments. We demonstrate the efficacy of AnyThermal and TartanRGBT, achieving state-of-the-art results with improvements of up to 36% across diverse environments and downstream tasks on existing datasets.
ThermalDiffusion: Visual-to-Thermal Image-to-Image Translation for Autonomous Navigation
Jun 26, 2025Autonomous systems rely on sensors to estimate the environment around them. However, cameras, LiDARs, and RADARs have their own limitations. In nighttime or degraded environments such as fog, mist, or dust, thermal cameras can provide valuable information regarding the presence of objects of interest due to their heat signature. They make it easy to identify humans and vehicles that are usually at higher temperatures compared to their surroundings. In this paper, we focus on the adaptation of thermal cameras for robotics and automation, where the biggest hurdle is the lack of data. Several multi-modal datasets are available for driving robotics research in tasks such as scene segmentation, object detection, and depth estimation, which are the cornerstone of autonomous systems. However, they are found to be lacking in thermal imagery. Our paper proposes a solution to augment these datasets with synthetic thermal data to enable widespread and rapid adaptation of thermal cameras. We explore the use of conditional diffusion models to convert existing RGB images to thermal images using self-attention to learn the thermal properties of real-world objects.
Deep Bayesian Future Fusion for Self-Supervised, High-Resolution, Off-Road Mapping
Mar 18, 2024



The limited sensing resolution of resource-constrained off-road vehicles poses significant challenges towards reliable off-road autonomy. To overcome this limitation, we propose a general framework based on fusing the future information (i.e. future fusion) for self-supervision. Recent approaches exploit this future information alongside the hand-crafted heuristics to directly supervise the targeted downstream tasks (e.g. traversability estimation). However, in this paper, we opt for a more general line of development - time-efficient completion of the highest resolution (i.e. 2cm per pixel) BEV map in a self-supervised manner via future fusion, which can be used for any downstream tasks for better longer range prediction. To this end, first, we create a high-resolution future-fusion dataset containing pairs of (RGB / height) raw sparse and noisy inputs and map-based dense labels. Next, to accommodate the noise and sparsity of the sensory information, especially in the distal regions, we design an efficient realization of the Bayes filter onto the vanilla convolutional network via the recurrent mechanism. Equipped with the ideas from SOTA generative models, our Bayesian structure effectively predicts high-quality BEV maps in the distal regions. Extensive evaluation on both the quality of completion and downstream task on our future-fusion dataset demonstrates the potential of our approach.
TartanDrive 2.0: More Modalities and Better Infrastructure to Further Self-Supervised Learning Research in Off-Road Driving Tasks
Feb 02, 2024
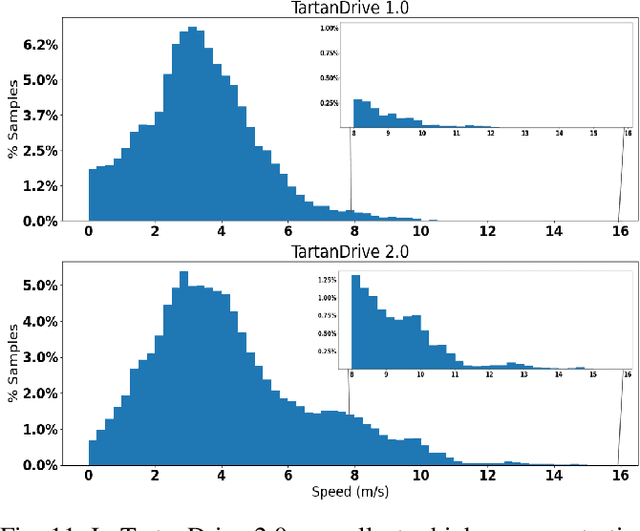


We present TartanDrive 2.0, a large-scale off-road driving dataset for self-supervised learning tasks. In 2021 we released TartanDrive 1.0, which is one of the largest datasets for off-road terrain. As a follow-up to our original dataset, we collected seven hours of data at speeds of up to 15m/s with the addition of three new LiDAR sensors alongside the original camera, inertial, GPS, and proprioceptive sensors. We also release the tools we use for collecting, processing, and querying the data, including our metadata system designed to further the utility of our data. Custom infrastructure allows end users to reconfigure the data to cater to their own platforms. These tools and infrastructure alongside the dataset are useful for a variety of tasks in the field of off-road autonomy and, by releasing them, we encourage collaborative data aggregation. These resources lower the barrier to entry to utilizing large-scale datasets, thereby helping facilitate the advancement of robotics in areas such as self-supervised learning, multi-modal perception, inverse reinforcement learning, and representation learning. The dataset is available at https://github.com/castacks/tartan drive 2.0.
PIAug -- Physics Informed Augmentation for Learning Vehicle Dynamics for Off-Road Navigation
Nov 01, 2023



Modeling the precise dynamics of off-road vehicles is a complex yet essential task due to the challenging terrain they encounter and the need for optimal performance and safety. Recently, there has been a focus on integrating nominal physics-based models alongside data-driven neural networks using Physics Informed Neural Networks. These approaches often assume the availability of a well-distributed dataset; however, this assumption may not hold due to regions in the physical distribution that are hard to collect, such as high-speed motions and rare terrains. Therefore, we introduce a physics-informed data augmentation methodology called PIAug. We show an example use case of the same by modeling high-speed and aggressive motion predictions, given a dataset with only low-speed data. During the training phase, we leverage the nominal model for generating target domain (medium and high velocity) data using the available source data (low velocity). Subsequently, we employ a physics-inspired loss function with this augmented dataset to incorporate prior knowledge of physics into the neural network. Our methodology results in up to 67% less mean error in trajectory prediction in comparison to a standalone nominal model, especially during aggressive maneuvers at speeds outside the training domain. In real-life navigation experiments, our model succeeds in 4x tighter waypoint tracking constraints than the Kinematic Bicycle Model (KBM) at out-of-domain velocities.
Learning Risk-Aware Costmaps via Inverse Reinforcement Learning for Off-Road Navigation
Jan 31, 2023The process of designing costmaps for off-road driving tasks is often a challenging and engineering-intensive task. Recent work in costmap design for off-road driving focuses on training deep neural networks to predict costmaps from sensory observations using corpora of expert driving data. However, such approaches are generally subject to over-confident mispredictions and are rarely evaluated in-the-loop on physical hardware. We present an inverse reinforcement learning-based method of efficiently training deep cost functions that are uncertainty-aware. We do so by leveraging recent advances in highly parallel model-predictive control and robotic risk estimation. In addition to demonstrating improvement at reproducing expert trajectories, we also evaluate the efficacy of these methods in challenging off-road navigation scenarios. We observe that our method significantly outperforms a geometric baseline, resulting in 44% improvement in expert path reconstruction and 57% fewer interventions in practice. We also observe that varying the risk tolerance of the vehicle results in qualitatively different navigation behaviors, especially with respect to higher-risk scenarios such as slopes and tall grass.
Multiple Waypoint Navigation in Unknown Indoor Environments
Sep 18, 2022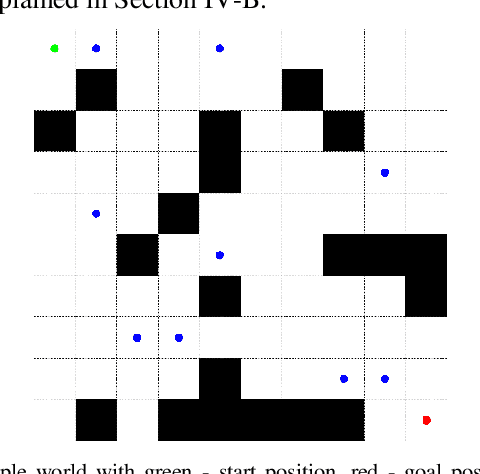
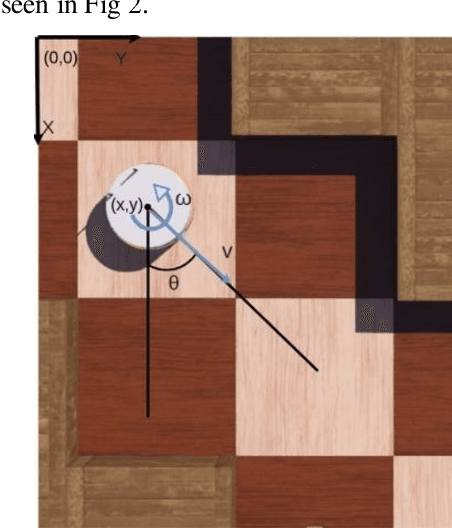
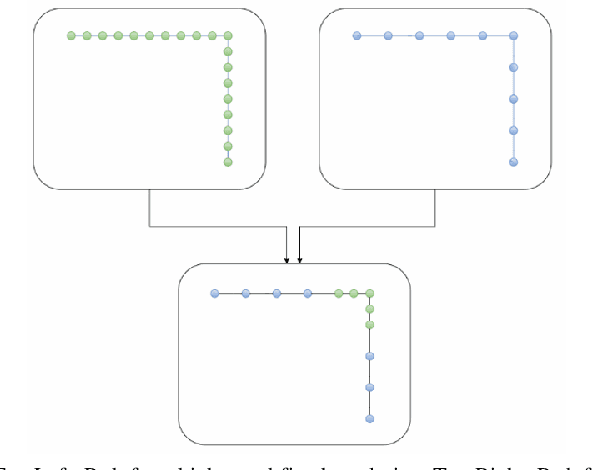
Indoor motion planning focuses on solving the problem of navigating an agent through a cluttered environment. To date, quite a lot of work has been done in this field, but these methods often fail to find the optimal balance between computationally inexpensive online path planning, and optimality of the path. Along with this, these works often prove optimality for single-start single-goal worlds. To address these challenges, we present a multiple waypoint path planner and controller stack for navigation in unknown indoor environments where waypoints include the goal along with the intermediary points that the robot must traverse before reaching the goal. Our approach makes use of a global planner (to find the next best waypoint at any instant), a local planner (to plan the path to a specific waypoint), and an adaptive Model Predictive Control strategy (for robust system control and faster maneuvers). We evaluate our algorithm on a set of randomly generated obstacle maps, intermediate waypoints, and start-goal pairs, with results indicating a significant reduction in computational costs, with high accuracies and robust control.
[Re] Differentiable Spatial Planning using Transformers
Aug 19, 2022![Figure 1 for [Re] Differentiable Spatial Planning using Transformers](/_next/image?url=https%3A%2F%2Fai2-s2-public.s3.amazonaws.com%2Ffigures%2F2017-08-08%2Ff52887523e4052a448b8dced56e196661b8109ea%2F4-Figure1-1.png&w=640&q=75)
![Figure 2 for [Re] Differentiable Spatial Planning using Transformers](/_next/image?url=https%3A%2F%2Fai2-s2-public.s3.amazonaws.com%2Ffigures%2F2017-08-08%2Ff52887523e4052a448b8dced56e196661b8109ea%2F5-Table1-1.png&w=640&q=75)
![Figure 3 for [Re] Differentiable Spatial Planning using Transformers](/_next/image?url=https%3A%2F%2Fai2-s2-public.s3.amazonaws.com%2Ffigures%2F2017-08-08%2Ff52887523e4052a448b8dced56e196661b8109ea%2F5-Figure2-1.png&w=640&q=75)
![Figure 4 for [Re] Differentiable Spatial Planning using Transformers](/_next/image?url=https%3A%2F%2Fai2-s2-public.s3.amazonaws.com%2Ffigures%2F2017-08-08%2Ff52887523e4052a448b8dced56e196661b8109ea%2F6-Table2-1.png&w=640&q=75)
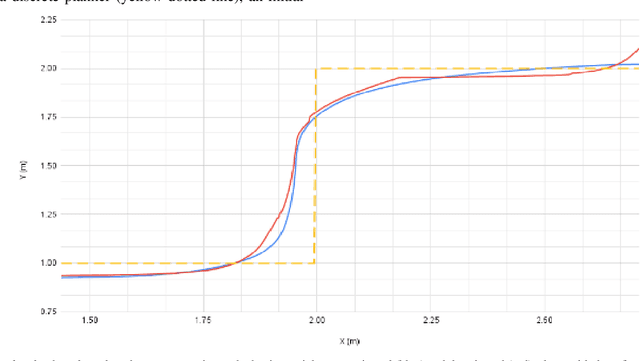
This report covers our reproduction effort of the paper 'Differentiable Spatial Planning using Transformers' by Chaplot et al. . In this paper, the problem of spatial path planning in a differentiable way is considered. They show that their proposed method of using Spatial Planning Transformers outperforms prior data-driven models and leverages differentiable structures to learn mapping without a ground truth map simultaneously. We verify these claims by reproducing their experiments and testing their method on new data. We also investigate the stability of planning accuracy with maps with increased obstacle complexity. Efforts to investigate and verify the learnings of the Mapper module were met with failure stemming from a paucity of computational resources and unreachable authors.
Reproducibility Report: Contrastive Learning of Socially-aware Motion Representations
Aug 18, 2022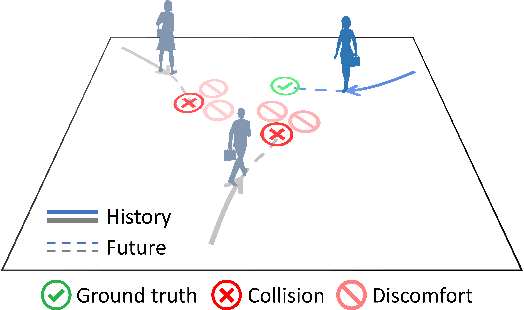


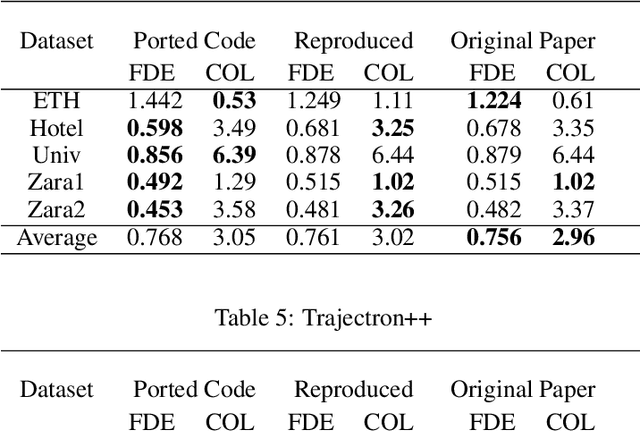
The following paper is a reproducibility report for "Social NCE: Contrastive Learning of Socially-aware Motion Representations" {\cite{liu2020snce}} published in ICCV 2021 as part of the ML Reproducibility Challenge 2021. The original code was made available by the author \footnote{\href{https://github.com/vita-epfl/social-nce}{https://github.com/vita-epfl/social-nce}}. We attempted to verify the results claimed by the authors and reimplemented their code in PyTorch Lightning.
Local NMPC on Global Optimised Path for Autonomous Racing
Sep 15, 2021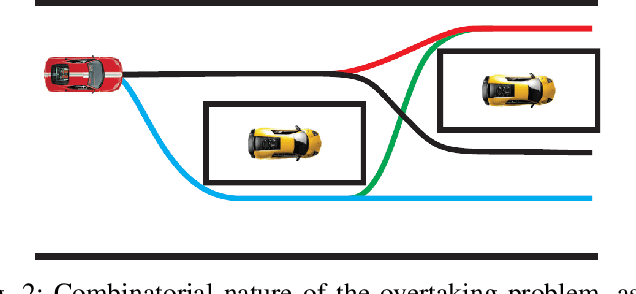
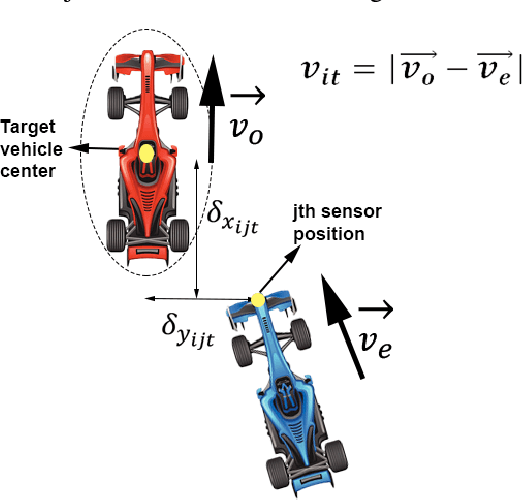
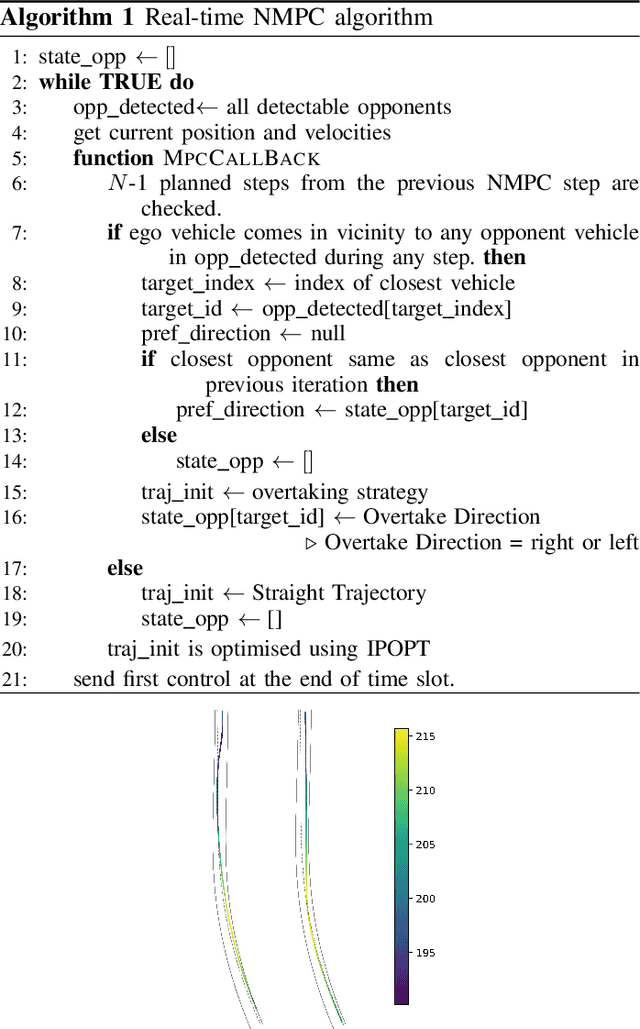
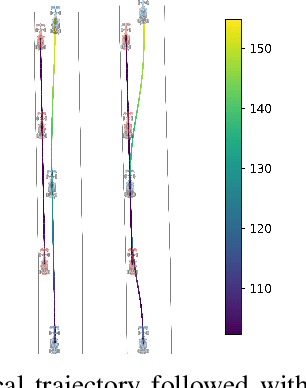
The paper presents a strategy for the control of anautonomous racing car on a pre-mapped track. Using a dynamic model of the vehicle, the optimal racing line is computed, taking track boundaries into account. With the optimal racing line as areference, a local nonlinear model predictive controller (NMPC) is proposed, which takes into account multiple local objectives like making more progress along the race line, avoiding collision with opponent vehicles, and use of drafting to achieve more progress.