 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSeeBelow: Sub-dermal 3D Reconstruction of Tumors with Surgical Robotic Palpation and Tactile Exploration
Aug 25, 2024Surgical scene understanding in Robot-assisted Minimally Invasive Surgery (RMIS) is highly reliant on visual cues and lacks tactile perception. Force-modulated surgical palpation with tactile feedback is necessary for localization, geometry/depth estimation, and dexterous exploration of abnormal stiff inclusions in subsurface tissue layers. Prior works explored surface-level tissue abnormalities or single layered tissue-tumor embeddings with more than 300 palpations for dense 2D stiffness mapping. Our approach focuses on 3D reconstructions of sub-dermal tumor surface profiles in multi-layered tissue (skin-fat-muscle) using a visually-guided novel tactile navigation policy. A robotic palpation probe with tri-axial force sensing was leveraged for tactile exploration of the phantom. From a surface mesh of the surgical region initialized from a depth camera, the policy explores a surgeon's region of interest through palpation, sampled from bayesian optimization. Each palpation includes contour following using a contact-safe impedance controller to trace the sub-dermal tumor geometry, until the underlying tumor-tissue boundary is reached. Projections of these contour following palpation trajectories allows 3D reconstruction of the subdermal tumor surface profile in less than 100 palpations. Our approach generates high-fidelity 3D surface reconstructions of rigid tumor embeddings in tissue layers with isotropic elasticities, although soft tumor geometries are yet to be explored.
Local NMPC on Global Optimised Path for Autonomous Racing
Sep 15, 2021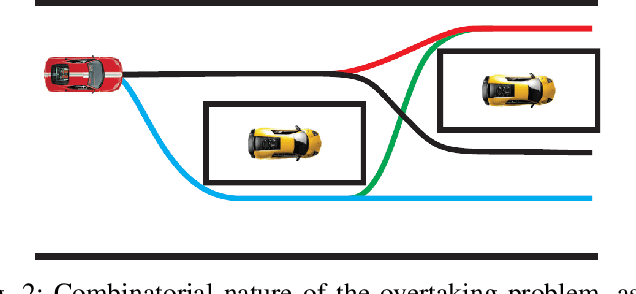
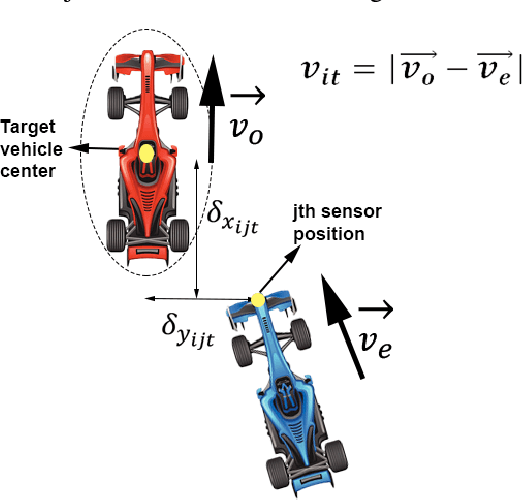
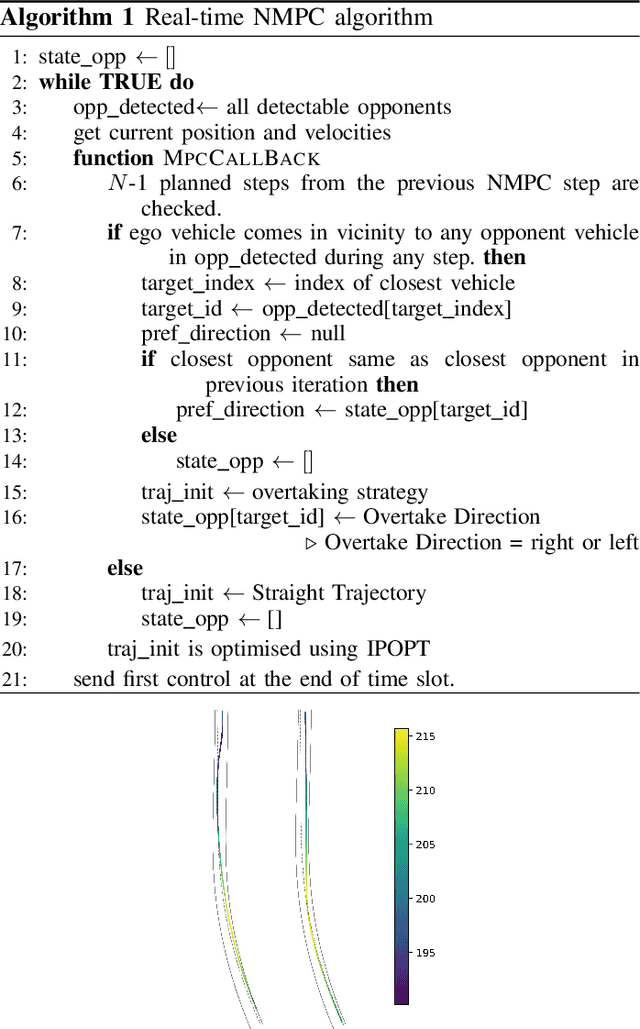
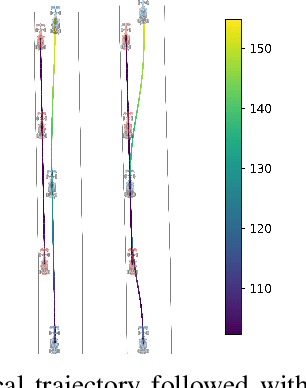
The paper presents a strategy for the control of anautonomous racing car on a pre-mapped track. Using a dynamic model of the vehicle, the optimal racing line is computed, taking track boundaries into account. With the optimal racing line as areference, a local nonlinear model predictive controller (NMPC) is proposed, which takes into account multiple local objectives like making more progress along the race line, avoiding collision with opponent vehicles, and use of drafting to achieve more progress.