 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocal NMPC on Global Optimised Path for Autonomous Racing
Sep 15, 2021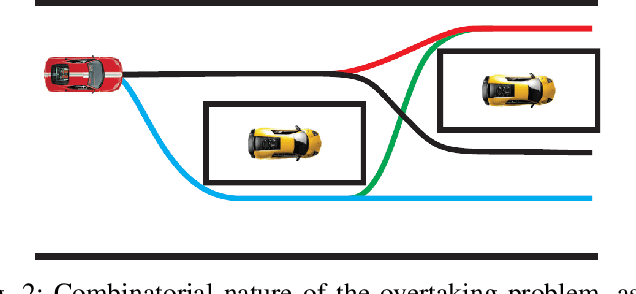
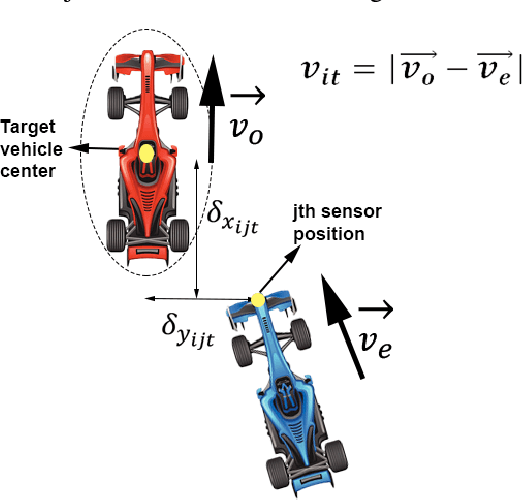
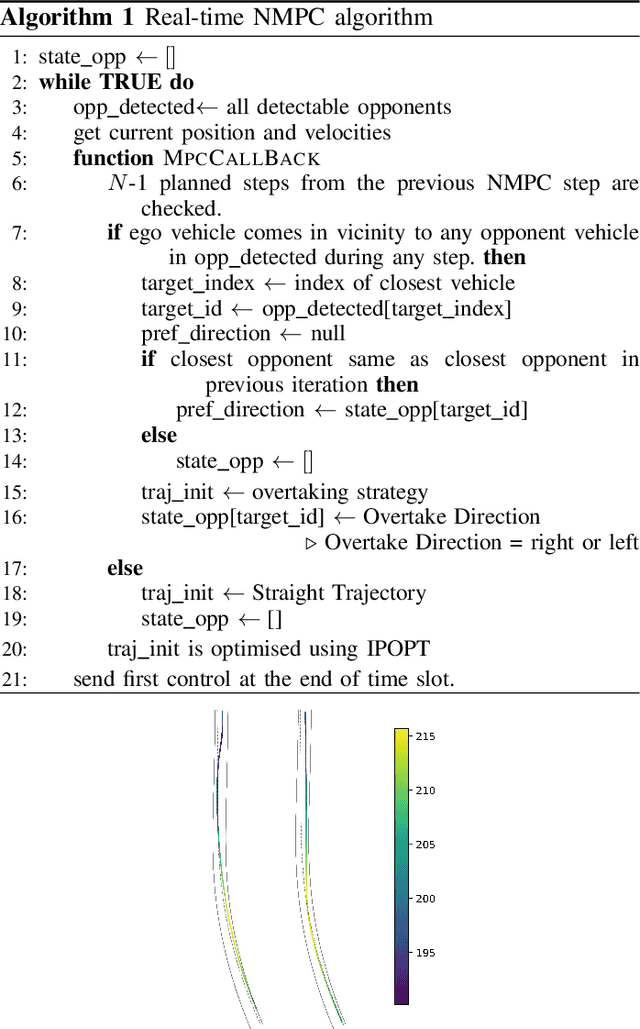
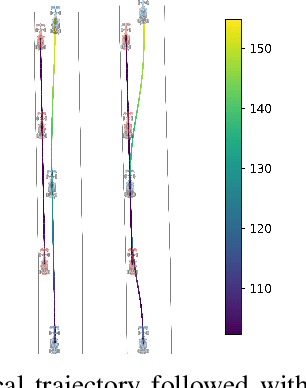
The paper presents a strategy for the control of anautonomous racing car on a pre-mapped track. Using a dynamic model of the vehicle, the optimal racing line is computed, taking track boundaries into account. With the optimal racing line as areference, a local nonlinear model predictive controller (NMPC) is proposed, which takes into account multiple local objectives like making more progress along the race line, avoiding collision with opponent vehicles, and use of drafting to achieve more progress.
Reproducibility of "FDA: Fourier Domain Adaptation forSemantic Segmentation
Apr 30, 2021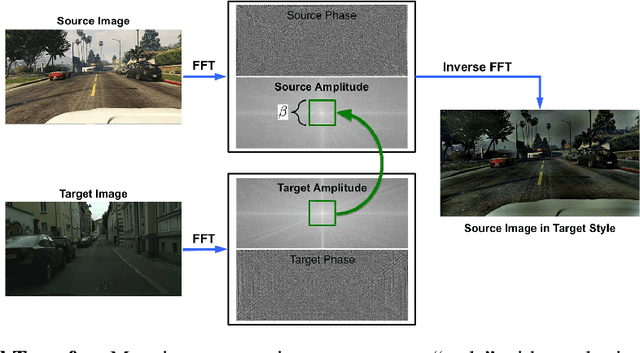

The following paper is a reproducibility report for "FDA: Fourier Domain Adaptation for Semantic Segmentation" published in the CVPR 2020 as part of the ML Reproducibility Challenge 2020. The original code was made available by the author. The well-commented version of the code containing all ablation studies performed derived from the original code along with WANDB integration is available at <github.com/thefatbandit/FDA> with proper instructions to execute experiments in README.