 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVAMOS: A Hierarchical Vision-Language-Action Model for Capability-Modulated and Steerable Navigation
Oct 23, 2025A fundamental challenge in robot navigation lies in learning policies that generalize across diverse environments while conforming to the unique physical constraints and capabilities of a specific embodiment (e.g., quadrupeds can walk up stairs, but rovers cannot). We propose VAMOS, a hierarchical VLA that decouples semantic planning from embodiment grounding: a generalist planner learns from diverse, open-world data, while a specialist affordance model learns the robot's physical constraints and capabilities in safe, low-cost simulation. We enabled this separation by carefully designing an interface that lets a high-level planner propose candidate paths directly in image space that the affordance model then evaluates and re-ranks. Our real-world experiments show that VAMOS achieves higher success rates in both indoor and complex outdoor navigation than state-of-the-art model-based and end-to-end learning methods. We also show that our hierarchical design enables cross-embodied navigation across legged and wheeled robots and is easily steerable using natural language. Real-world ablations confirm that the specialist model is key to embodiment grounding, enabling a single high-level planner to be deployed across physically distinct wheeled and legged robots. Finally, this model significantly enhances single-robot reliability, achieving 3X higher success rates by rejecting physically infeasible plans. Website: https://vamos-vla.github.io/
Long Range Navigator (LRN): Extending robot planning horizons beyond metric maps
Apr 17, 2025A robot navigating an outdoor environment with no prior knowledge of the space must rely on its local sensing to perceive its surroundings and plan. This can come in the form of a local metric map or local policy with some fixed horizon. Beyond that, there is a fog of unknown space marked with some fixed cost. A limited planning horizon can often result in myopic decisions leading the robot off course or worse, into very difficult terrain. Ideally, we would like the robot to have full knowledge that can be orders of magnitude larger than a local cost map. In practice, this is intractable due to sparse sensing information and often computationally expensive. In this work, we make a key observation that long-range navigation only necessitates identifying good frontier directions for planning instead of full map knowledge. To this end, we propose Long Range Navigator (LRN), that learns an intermediate affordance representation mapping high-dimensional camera images to `affordable' frontiers for planning, and then optimizing for maximum alignment with the desired goal. LRN notably is trained entirely on unlabeled ego-centric videos making it easy to scale and adapt to new platforms. Through extensive off-road experiments on Spot and a Big Vehicle, we find that augmenting existing navigation stacks with LRN reduces human interventions at test-time and leads to faster decision making indicating the relevance of LRN. https://personalrobotics.github.io/lrn
Agile Continuous Jumping in Discontinuous Terrains
Sep 17, 2024



We focus on agile, continuous, and terrain-adaptive jumping of quadrupedal robots in discontinuous terrains such as stairs and stepping stones. Unlike single-step jumping, continuous jumping requires accurately executing highly dynamic motions over long horizons, which is challenging for existing approaches. To accomplish this task, we design a hierarchical learning and control framework, which consists of a learned heightmap predictor for robust terrain perception, a reinforcement-learning-based centroidal-level motion policy for versatile and terrain-adaptive planning, and a low-level model-based leg controller for accurate motion tracking. In addition, we minimize the sim-to-real gap by accurately modeling the hardware characteristics. Our framework enables a Unitree Go1 robot to perform agile and continuous jumps on human-sized stairs and sparse stepping stones, for the first time to the best of our knowledge. In particular, the robot can cross two stair steps in each jump and completes a 3.5m long, 2.8m high, 14-step staircase in 4.5 seconds. Moreover, the same policy outperforms baselines in various other parkour tasks, such as jumping over single horizontal or vertical discontinuities. Experiment videos can be found at \url{https://yxyang.github.io/jumping\_cod/}.
DROID: A Large-Scale In-The-Wild Robot Manipulation Dataset
Mar 19, 2024



The creation of large, diverse, high-quality robot manipulation datasets is an important stepping stone on the path toward more capable and robust robotic manipulation policies. However, creating such datasets is challenging: collecting robot manipulation data in diverse environments poses logistical and safety challenges and requires substantial investments in hardware and human labour. As a result, even the most general robot manipulation policies today are mostly trained on data collected in a small number of environments with limited scene and task diversity. In this work, we introduce DROID (Distributed Robot Interaction Dataset), a diverse robot manipulation dataset with 76k demonstration trajectories or 350 hours of interaction data, collected across 564 scenes and 84 tasks by 50 data collectors in North America, Asia, and Europe over the course of 12 months. We demonstrate that training with DROID leads to policies with higher performance and improved generalization ability. We open source the full dataset, policy learning code, and a detailed guide for reproducing our robot hardware setup.
TartanDrive 2.0: More Modalities and Better Infrastructure to Further Self-Supervised Learning Research in Off-Road Driving Tasks
Feb 02, 2024
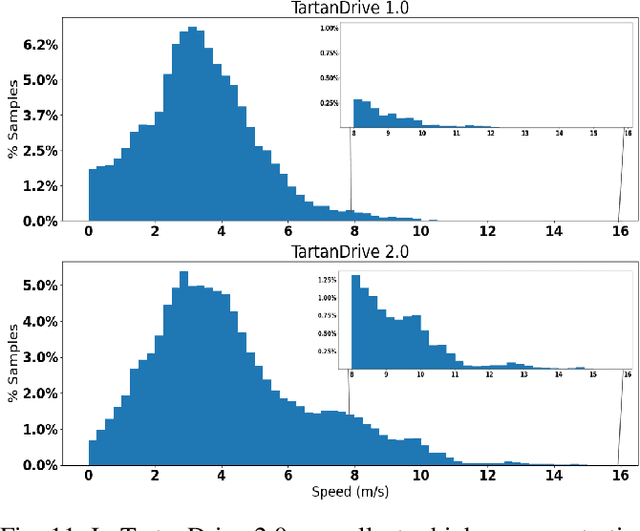


We present TartanDrive 2.0, a large-scale off-road driving dataset for self-supervised learning tasks. In 2021 we released TartanDrive 1.0, which is one of the largest datasets for off-road terrain. As a follow-up to our original dataset, we collected seven hours of data at speeds of up to 15m/s with the addition of three new LiDAR sensors alongside the original camera, inertial, GPS, and proprioceptive sensors. We also release the tools we use for collecting, processing, and querying the data, including our metadata system designed to further the utility of our data. Custom infrastructure allows end users to reconfigure the data to cater to their own platforms. These tools and infrastructure alongside the dataset are useful for a variety of tasks in the field of off-road autonomy and, by releasing them, we encourage collaborative data aggregation. These resources lower the barrier to entry to utilizing large-scale datasets, thereby helping facilitate the advancement of robotics in areas such as self-supervised learning, multi-modal perception, inverse reinforcement learning, and representation learning. The dataset is available at https://github.com/castacks/tartan drive 2.0.
Learning Risk-Aware Costmaps via Inverse Reinforcement Learning for Off-Road Navigation
Jan 31, 2023The process of designing costmaps for off-road driving tasks is often a challenging and engineering-intensive task. Recent work in costmap design for off-road driving focuses on training deep neural networks to predict costmaps from sensory observations using corpora of expert driving data. However, such approaches are generally subject to over-confident mispredictions and are rarely evaluated in-the-loop on physical hardware. We present an inverse reinforcement learning-based method of efficiently training deep cost functions that are uncertainty-aware. We do so by leveraging recent advances in highly parallel model-predictive control and robotic risk estimation. In addition to demonstrating improvement at reproducing expert trajectories, we also evaluate the efficacy of these methods in challenging off-road navigation scenarios. We observe that our method significantly outperforms a geometric baseline, resulting in 44% improvement in expert path reconstruction and 57% fewer interventions in practice. We also observe that varying the risk tolerance of the vehicle results in qualitatively different navigation behaviors, especially with respect to higher-risk scenarios such as slopes and tall grass.
How Does It Feel? Self-Supervised Costmap Learning for Off-Road Vehicle Traversability
Sep 22, 2022
Estimating terrain traversability in off-road environments requires reasoning about complex interaction dynamics between the robot and these terrains. However, it is challenging to build an accurate physics model, or create informative labels to learn a model in a supervised manner, for these interactions. We propose a method that learns to predict traversability costmaps by combining exteroceptive environmental information with proprioceptive terrain interaction feedback in a self-supervised manner. Additionally, we propose a novel way of incorporating robot velocity in the costmap prediction pipeline. We validate our method in multiple short and large-scale navigation tasks on a large, autonomous all-terrain vehicle (ATV) on challenging off-road terrains, and demonstrate ease of integration on a separate large ground robot. Our short-scale navigation results show that using our learned costmaps leads to overall smoother navigation, and provides the robot with a more fine-grained understanding of the interactions between the robot and different terrain types, such as grass and gravel. Our large-scale navigation trials show that we can reduce the number of interventions by up to 57% compared to an occupancy-based navigation baseline in challenging off-road courses ranging from 400 m to 3150 m.