 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProVox: Personalization and Proactive Planning for Situated Human-Robot Collaboration
Jun 13, 2025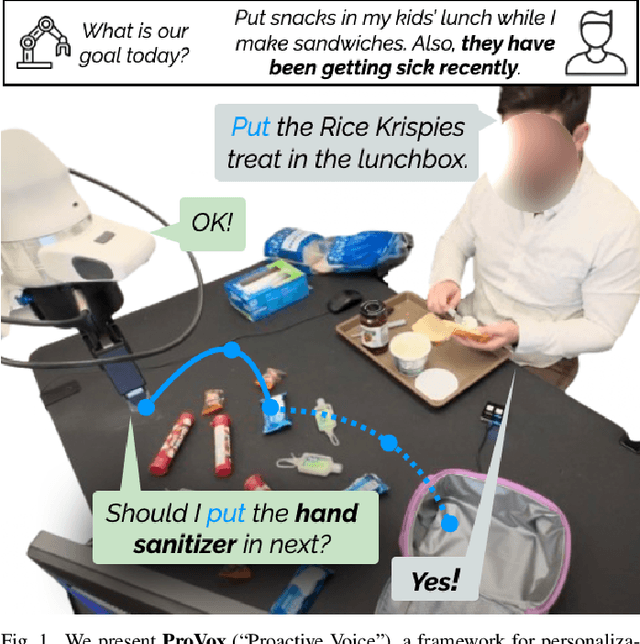

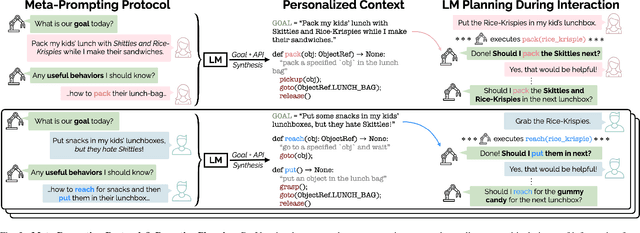
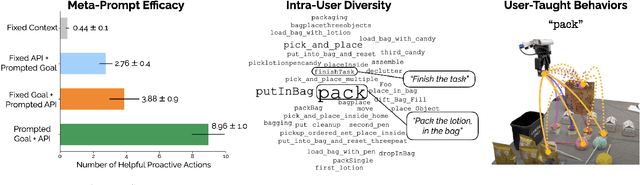
Collaborative robots must quickly adapt to their partner's intent and preferences to proactively identify helpful actions. This is especially true in situated settings where human partners can continually teach robots new high-level behaviors, visual concepts, and physical skills (e.g., through demonstration), growing the robot's capabilities as the human-robot pair work together to accomplish diverse tasks. In this work, we argue that robots should be able to infer their partner's goals from early interactions and use this information to proactively plan behaviors ahead of explicit instructions from the user. Building from the strong commonsense priors and steerability of large language models, we introduce ProVox ("Proactive Voice"), a novel framework that enables robots to efficiently personalize and adapt to individual collaborators. We design a meta-prompting protocol that empowers users to communicate their distinct preferences, intent, and expected robot behaviors ahead of starting a physical interaction. ProVox then uses the personalized prompt to condition a proactive language model task planner that anticipates a user's intent from the current interaction context and robot capabilities to suggest helpful actions; in doing so, we alleviate user burden, minimizing the amount of time partners spend explicitly instructing and supervising the robot. We evaluate ProVox through user studies grounded in household manipulation tasks (e.g., assembling lunch bags) that measure the efficiency of the collaboration, as well as features such as perceived helpfulness, ease of use, and reliability. Our analysis suggests that both meta-prompting and proactivity are critical, resulting in 38.7% faster task completion times and 31.9% less user burden relative to non-active baselines. Supplementary material, code, and videos can be found at https://provox-2025.github.io.
Vocal Sandbox: Continual Learning and Adaptation for Situated Human-Robot Collaboration
Nov 04, 2024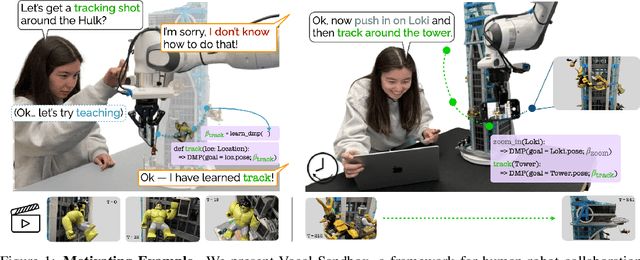


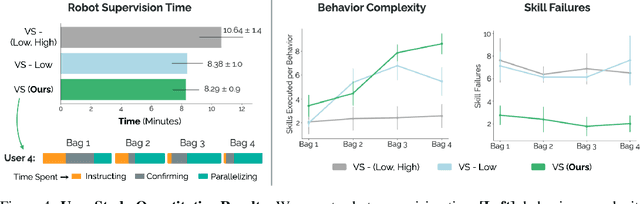
We introduce Vocal Sandbox, a framework for enabling seamless human-robot collaboration in situated environments. Systems in our framework are characterized by their ability to adapt and continually learn at multiple levels of abstraction from diverse teaching modalities such as spoken dialogue, object keypoints, and kinesthetic demonstrations. To enable such adaptation, we design lightweight and interpretable learning algorithms that allow users to build an understanding and co-adapt to a robot's capabilities in real-time, as they teach new behaviors. For example, after demonstrating a new low-level skill for "tracking around" an object, users are provided with trajectory visualizations of the robot's intended motion when asked to track a new object. Similarly, users teach high-level planning behaviors through spoken dialogue, using pretrained language models to synthesize behaviors such as "packing an object away" as compositions of low-level skills $-$ concepts that can be reused and built upon. We evaluate Vocal Sandbox in two settings: collaborative gift bag assembly and LEGO stop-motion animation. In the first setting, we run systematic ablations and user studies with 8 non-expert participants, highlighting the impact of multi-level teaching. Across 23 hours of total robot interaction time, users teach 17 new high-level behaviors with an average of 16 novel low-level skills, requiring 22.1% less active supervision compared to baselines and yielding more complex autonomous performance (+19.7%) with fewer failures (-67.1%). Qualitatively, users strongly prefer Vocal Sandbox systems due to their ease of use (+20.6%) and overall performance (+13.9%). Finally, we pair an experienced system-user with a robot to film a stop-motion animation; over two hours of continuous collaboration, the user teaches progressively more complex motion skills to shoot a 52 second (232 frame) movie.
OpenVLA: An Open-Source Vision-Language-Action Model
Jun 13, 2024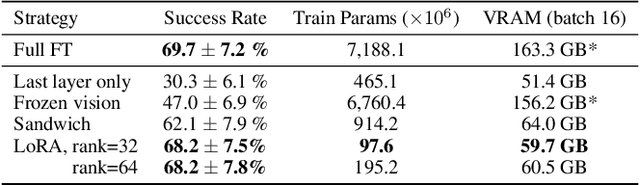
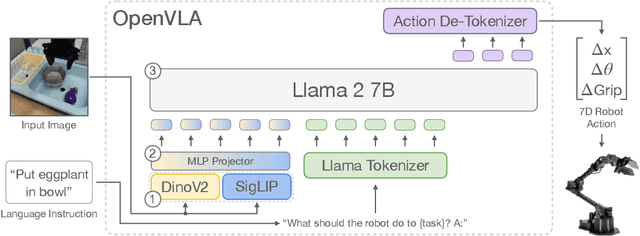
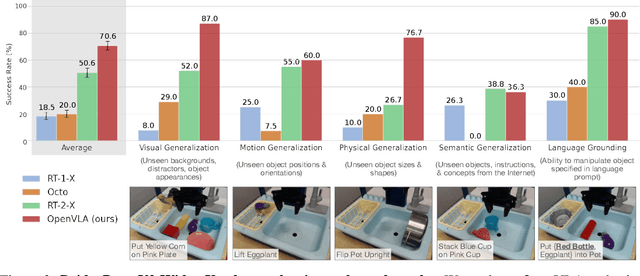
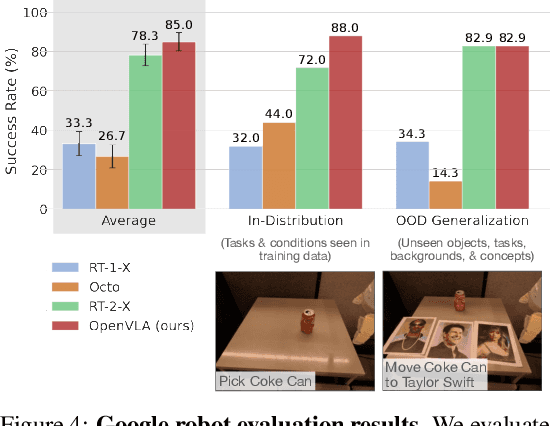
Large policies pretrained on a combination of Internet-scale vision-language data and diverse robot demonstrations have the potential to change how we teach robots new skills: rather than training new behaviors from scratch, we can fine-tune such vision-language-action (VLA) models to obtain robust, generalizable policies for visuomotor control. Yet, widespread adoption of VLAs for robotics has been challenging as 1) existing VLAs are largely closed and inaccessible to the public, and 2) prior work fails to explore methods for efficiently fine-tuning VLAs for new tasks, a key component for adoption. Addressing these challenges, we introduce OpenVLA, a 7B-parameter open-source VLA trained on a diverse collection of 970k real-world robot demonstrations. OpenVLA builds on a Llama 2 language model combined with a visual encoder that fuses pretrained features from DINOv2 and SigLIP. As a product of the added data diversity and new model components, OpenVLA demonstrates strong results for generalist manipulation, outperforming closed models such as RT-2-X (55B) by 16.5% in absolute task success rate across 29 tasks and multiple robot embodiments, with 7x fewer parameters. We further show that we can effectively fine-tune OpenVLA for new settings, with especially strong generalization results in multi-task environments involving multiple objects and strong language grounding abilities, and outperform expressive from-scratch imitation learning methods such as Diffusion Policy by 20.4%. We also explore compute efficiency; as a separate contribution, we show that OpenVLA can be fine-tuned on consumer GPUs via modern low-rank adaptation methods and served efficiently via quantization without a hit to downstream success rate. Finally, we release model checkpoints, fine-tuning notebooks, and our PyTorch codebase with built-in support for training VLAs at scale on Open X-Embodiment datasets.
DROID: A Large-Scale In-The-Wild Robot Manipulation Dataset
Mar 19, 2024



The creation of large, diverse, high-quality robot manipulation datasets is an important stepping stone on the path toward more capable and robust robotic manipulation policies. However, creating such datasets is challenging: collecting robot manipulation data in diverse environments poses logistical and safety challenges and requires substantial investments in hardware and human labour. As a result, even the most general robot manipulation policies today are mostly trained on data collected in a small number of environments with limited scene and task diversity. In this work, we introduce DROID (Distributed Robot Interaction Dataset), a diverse robot manipulation dataset with 76k demonstration trajectories or 350 hours of interaction data, collected across 564 scenes and 84 tasks by 50 data collectors in North America, Asia, and Europe over the course of 12 months. We demonstrate that training with DROID leads to policies with higher performance and improved generalization ability. We open source the full dataset, policy learning code, and a detailed guide for reproducing our robot hardware setup.
Prismatic VLMs: Investigating the Design Space of Visually-Conditioned Language Models
Feb 12, 2024



Visually-conditioned language models (VLMs) have seen growing adoption in applications such as visual dialogue, scene understanding, and robotic task planning; adoption that has fueled a wealth of new models such as LLaVa, InstructBLIP, and PaLI-3. Despite the volume of new releases, key design decisions around image preprocessing, architecture, and optimization are under-explored, making it challenging to understand what factors account for model performance $-$ a challenge further complicated by the lack of objective, consistent evaluations. To address these gaps, we first compile a suite of standardized evaluations spanning visual question answering, object localization from language, and targeted challenge sets that probe properties such as hallucination; evaluations that provide calibrated, fine-grained insight into a VLM's capabilities. Second, we rigorously investigate VLMs along key design axes, including pretrained visual representations and quantifying the tradeoffs of using base vs. instruct-tuned language models, amongst others. We couple our analysis with three resource contributions: (1) a unified framework for evaluating VLMs, (2) optimized, flexible code for VLM training, and (3) checkpoints for all models, including a family of VLMs at the 7-13B scale that strictly outperform InstructBLIP and LLaVa v1.5, the state-of-the-art in open-source VLMs.
OBELISC: An Open Web-Scale Filtered Dataset of Interleaved Image-Text Documents
Jun 21, 2023



Large multimodal models trained on natural documents, which interleave images and text, outperform models trained on image-text pairs on various multimodal benchmarks that require reasoning over one or multiple images to generate a text. However, the datasets used to train these models have not been released, and the collection process has not been fully specified. We introduce the OBELISC dataset, an open web-scale filtered dataset of interleaved image-text documents comprising 141 million web pages extracted from Common Crawl, 353 million associated images, and 115 billion text tokens. We describe the dataset creation process, present comprehensive filtering rules, and provide an analysis of the dataset's content. To show the viability of OBELISC, we train an 80 billion parameters vision and language model on the dataset and obtain competitive performance on various multimodal benchmarks. We release the code to reproduce the dataset along with the dataset itself.
Toward Grounded Social Reasoning
Jun 14, 2023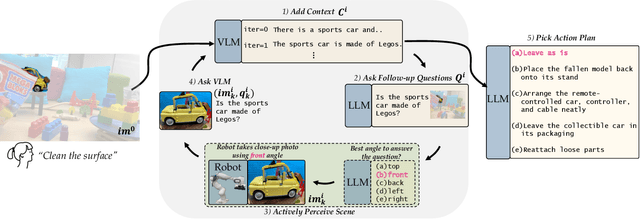
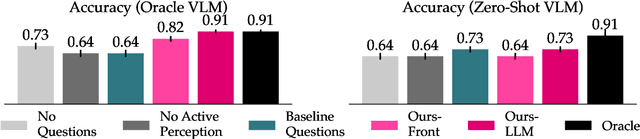

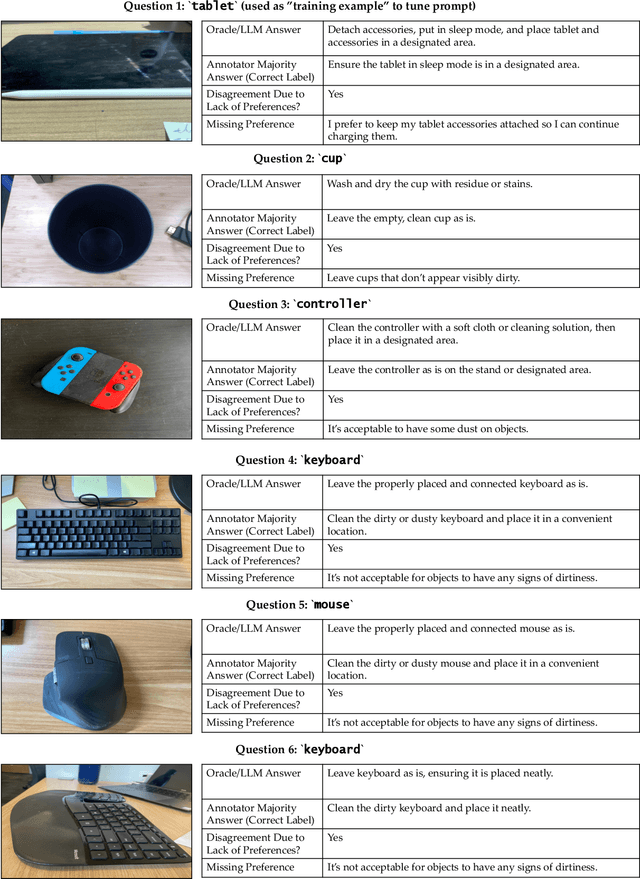
Consider a robot tasked with tidying a desk with a meticulously constructed Lego sports car. A human may recognize that it is not socially appropriate to disassemble the sports car and put it away as part of the "tidying". How can a robot reach that conclusion? Although large language models (LLMs) have recently been used to enable social reasoning, grounding this reasoning in the real world has been challenging. To reason in the real world, robots must go beyond passively querying LLMs and *actively gather information from the environment* that is required to make the right decision. For instance, after detecting that there is an occluded car, the robot may need to actively perceive the car to know whether it is an advanced model car made out of Legos or a toy car built by a toddler. We propose an approach that leverages an LLM and vision language model (VLM) to help a robot actively perceive its environment to perform grounded social reasoning. To evaluate our framework at scale, we release the MessySurfaces dataset which contains images of 70 real-world surfaces that need to be cleaned. We additionally illustrate our approach with a robot on 2 carefully designed surfaces. We find an average 12.9% improvement on the MessySurfaces benchmark and an average 15% improvement on the robot experiments over baselines that do not use active perception. The dataset, code, and videos of our approach can be found at https://minaek.github.io/groundedsocialreasoning.
Language-Driven Representation Learning for Robotics
Feb 24, 2023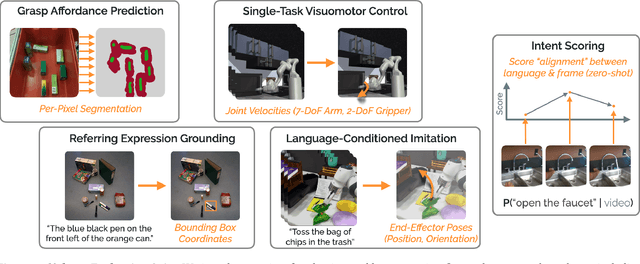

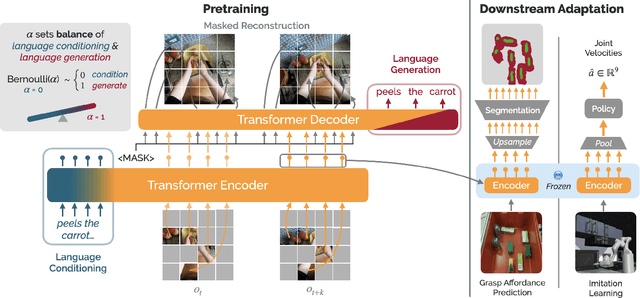
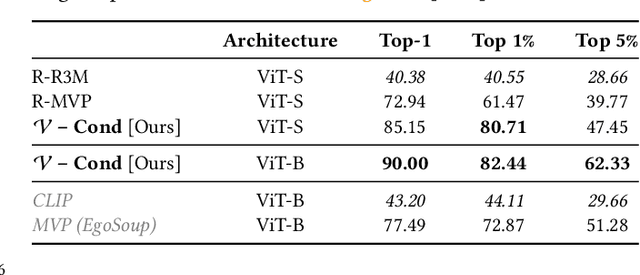
Recent work in visual representation learning for robotics demonstrates the viability of learning from large video datasets of humans performing everyday tasks. Leveraging methods such as masked autoencoding and contrastive learning, these representations exhibit strong transfer to policy learning for visuomotor control. But, robot learning encompasses a diverse set of problems beyond control including grasp affordance prediction, language-conditioned imitation learning, and intent scoring for human-robot collaboration, amongst others. First, we demonstrate that existing representations yield inconsistent results across these tasks: masked autoencoding approaches pick up on low-level spatial features at the cost of high-level semantics, while contrastive learning approaches capture the opposite. We then introduce Voltron, a framework for language-driven representation learning from human videos and associated captions. Voltron trades off language-conditioned visual reconstruction to learn low-level visual patterns, and visually-grounded language generation to encode high-level semantics. We also construct a new evaluation suite spanning five distinct robot learning problems $\unicode{x2013}$ a unified platform for holistically evaluating visual representations for robotics. Through comprehensive, controlled experiments across all five problems, we find that Voltron's language-driven representations outperform the prior state-of-the-art, especially on targeted problems requiring higher-level features.
"No, to the Right" -- Online Language Corrections for Robotic Manipulation via Shared Autonomy
Jan 06, 2023
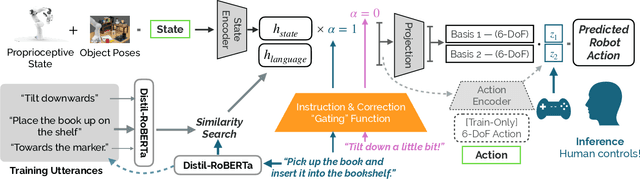
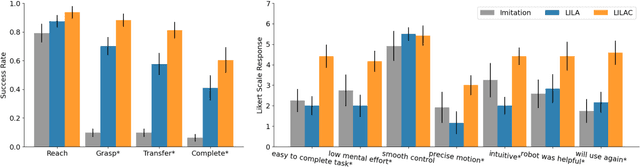
Systems for language-guided human-robot interaction must satisfy two key desiderata for broad adoption: adaptivity and learning efficiency. Unfortunately, existing instruction-following agents cannot adapt, lacking the ability to incorporate online natural language supervision, and even if they could, require hundreds of demonstrations to learn even simple policies. In this work, we address these problems by presenting Language-Informed Latent Actions with Corrections (LILAC), a framework for incorporating and adapting to natural language corrections - "to the right," or "no, towards the book" - online, during execution. We explore rich manipulation domains within a shared autonomy paradigm. Instead of discrete turn-taking between a human and robot, LILAC splits agency between the human and robot: language is an input to a learned model that produces a meaningful, low-dimensional control space that the human can use to guide the robot. Each real-time correction refines the human's control space, enabling precise, extended behaviors - with the added benefit of requiring only a handful of demonstrations to learn. We evaluate our approach via a user study where users work with a Franka Emika Panda manipulator to complete complex manipulation tasks. Compared to existing learned baselines covering both open-loop instruction following and single-turn shared autonomy, we show that our corrections-aware approach obtains higher task completion rates, and is subjectively preferred by users because of its reliability, precision, and ease of use.
Eliciting Compatible Demonstrations for Multi-Human Imitation Learning
Oct 14, 2022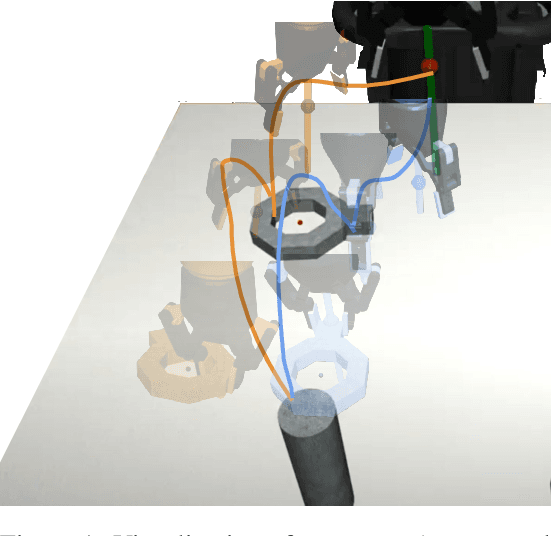
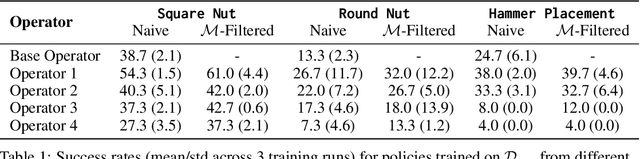
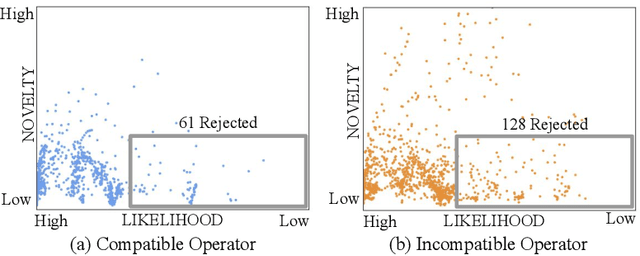

Imitation learning from human-provided demonstrations is a strong approach for learning policies for robot manipulation. While the ideal dataset for imitation learning is homogenous and low-variance -- reflecting a single, optimal method for performing a task -- natural human behavior has a great deal of heterogeneity, with several optimal ways to demonstrate a task. This multimodality is inconsequential to human users, with task variations manifesting as subconscious choices; for example, reaching down, then across to grasp an object, versus reaching across, then down. Yet, this mismatch presents a problem for interactive imitation learning, where sequences of users improve on a policy by iteratively collecting new, possibly conflicting demonstrations. To combat this problem of demonstrator incompatibility, this work designs an approach for 1) measuring the compatibility of a new demonstration given a base policy, and 2) actively eliciting more compatible demonstrations from new users. Across two simulation tasks requiring long-horizon, dexterous manipulation and a real-world "food plating" task with a Franka Emika Panda arm, we show that we can both identify incompatible demonstrations via post-hoc filtering, and apply our compatibility measure to actively elicit compatible demonstrations from new users, leading to improved task success rates across simulated and real environments.