 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiSCo: Diffusion Sequence Copilots for Shared Autonomy
Mar 24, 2026Shared autonomy combines human user and AI copilot actions to control complex systems such as robotic arms. When a task is challenging, requires high dimensional control, or is subject to corruption, shared autonomy can significantly increase task performance by using a trained copilot to effectively correct user actions in a manner consistent with the user's goals. To significantly improve the performance of shared autonomy, we introduce Diffusion Sequence Copilots (DiSCo): a method of shared autonomy with diffusion policy that plans action sequences consistent with past user actions. DiSCo seeds and inpaints the diffusion process with user-provided actions with hyperparameters to balance conformity to expert actions, alignment with user intent, and perceived responsiveness. We demonstrate that DiSCo substantially improves task performance in simulated driving and robotic arm tasks. Project website: https://sites.google.com/view/disco-shared-autonomy/
DexEXO: A Wearability-First Dexterous Exoskeleton for Operator-Agnostic Demonstration and Learning
Mar 18, 2026Scaling dexterous robot learning is constrained by the difficulty of collecting high-quality demonstrations across diverse operators. Existing wearable interfaces often trade comfort and cross-user adaptability for kinematic fidelity, while embodiment mismatch between demonstration and deployment requires visual post-processing before policy training. We present DexEXO, a wearability-first hand exoskeleton that aligns visual appearance, contact geometry, and kinematics at the hardware level. DexEXO features a pose-tolerant thumb mechanism and a slider-based finger interface analytically modeled to support hand lengths from 140~mm to 217~mm, reducing operator-specific fitting and enabling scalable cross-operator data collection. A passive hand visually matches the deployed robot, allowing direct policy training from raw wrist-mounted RGB observations. User studies demonstrate improved comfort and usability compared to prior wearable systems. Using visually aligned observations alone, we train diffusion policies that achieve competitive performance while substantially simplifying the end-to-end pipeline. These results show that prioritizing wearability and hardware-level embodiment alignment reduces both human and algorithmic bottlenecks without sacrificing task performance. Project Page: https://dexexo-research.github.io/
TeleDex: Accessible Dexterous Teleoperation
Mar 17, 2026Despite increasing dataset scale and model capacity, robot manipulation policies still struggle to generalize beyond their training distributions. As a result, deploying state-of-the-art policies in new environments, tasks, or robot embodiments often requires collecting additional demonstrations. Enabling this in real-world deployment settings requires tools that allow users to collect demonstrations quickly, affordably, and with minimal setup. We present TeleDex, an open-source system for intuitive teleoperation of dexterous hands and robotic manipulators using any readily available phone. The system streams low-latency 6-DoF wrist poses and articulated 21-DoF hand state estimates from the phone, which are retargeted to robot arms and multi-fingered hands without requiring external tracking infrastructure. TeleDex supports both a handheld phone-only mode and an optional 3D-printable hand-mounted interface for finger-level teleoperation. By lowering the hardware and setup barriers to dexterous teleoperation, TeleDex enables users to quickly collect demonstrations during deployment to support policy fine-tuning. We evaluate the system across simulation and real-world manipulation tasks, demonstrating its effectiveness as a unified scalable interface for robot teleoperation. All software and hardware designs, along with demonstration videos, are open-source and available at orayyan.com/teledex.
MolmoSpaces: A Large-Scale Open Ecosystem for Robot Navigation and Manipulation
Feb 11, 2026Deploying robots at scale demands robustness to the long tail of everyday situations. The countless variations in scene layout, object geometry, and task specifications that characterize real environments are vast and underrepresented in existing robot benchmarks. Measuring this level of generalization requires infrastructure at a scale and diversity that physical evaluation alone cannot provide. We introduce MolmoSpaces, a fully open ecosystem to support large-scale benchmarking of robot policies. MolmoSpaces consists of over 230k diverse indoor environments, ranging from handcrafted household scenes to procedurally generated multiroom houses, populated with 130k richly annotated object assets, including 48k manipulable objects with 42M stable grasps. Crucially, these environments are simulator-agnostic, supporting popular options such as MuJoCo, Isaac, and ManiSkill. The ecosystem supports the full spectrum of embodied tasks: static and mobile manipulation, navigation, and multiroom long-horizon tasks requiring coordinated perception, planning, and interaction across entire indoor environments. We also design MolmoSpaces-Bench, a benchmark suite of 8 tasks in which robots interact with our diverse scenes and richly annotated objects. Our experiments show MolmoSpaces-Bench exhibits strong sim-to-real correlation (R = 0.96, \r{ho} = 0.98), confirm newer and stronger zero-shot policies outperform earlier versions in our benchmarks, and identify key sensitivities to prompt phrasing, initial joint positions, and camera occlusion. Through MolmoSpaces and its open-source assets and tooling, we provide a foundation for scalable data generation, policy training, and benchmark creation for robot learning research.
Casper: Inferring Diverse Intents for Assistive Teleoperation with Vision Language Models
Jun 17, 2025



Assistive teleoperation, where control is shared between a human and a robot, enables efficient and intuitive human-robot collaboration in diverse and unstructured environments. A central challenge in real-world assistive teleoperation is for the robot to infer a wide range of human intentions from user control inputs and to assist users with correct actions. Existing methods are either confined to simple, predefined scenarios or restricted to task-specific data distributions at training, limiting their support for real-world assistance. We introduce Casper, an assistive teleoperation system that leverages commonsense knowledge embedded in pre-trained visual language models (VLMs) for real-time intent inference and flexible skill execution. Casper incorporates an open-world perception module for a generalized understanding of novel objects and scenes, a VLM-powered intent inference mechanism that leverages commonsense reasoning to interpret snippets of teleoperated user input, and a skill library that expands the scope of prior assistive teleoperation systems to support diverse, long-horizon mobile manipulation tasks. Extensive empirical evaluation, including human studies and system ablations, demonstrates that Casper improves task performance, reduces human cognitive load, and achieves higher user satisfaction than direct teleoperation and assistive teleoperation baselines.
SAMJAM: Zero-Shot Video Scene Graph Generation for Egocentric Kitchen Videos
Apr 10, 2025Video Scene Graph Generation (VidSGG) is an important topic in understanding dynamic kitchen environments. Current models for VidSGG require extensive training to produce scene graphs. Recently, Vision Language Models (VLM) and Vision Foundation Models (VFM) have demonstrated impressive zero-shot capabilities in a variety of tasks. However, VLMs like Gemini struggle with the dynamics for VidSGG, failing to maintain stable object identities across frames. To overcome this limitation, we propose SAMJAM, a zero-shot pipeline that combines SAM2's temporal tracking with Gemini's semantic understanding. SAM2 also improves upon Gemini's object grounding by producing more accurate bounding boxes. In our method, we first prompt Gemini to generate a frame-level scene graph. Then, we employ a matching algorithm to map each object in the scene graph with a SAM2-generated or SAM2-propagated mask, producing a temporally-consistent scene graph in dynamic environments. Finally, we repeat this process again in each of the following frames. We empirically demonstrate that SAMJAM outperforms Gemini by 8.33% in mean recall on the EPIC-KITCHENS and EPIC-KITCHENS-100 datasets.
How to Train Your Robots? The Impact of Demonstration Modality on Imitation Learning
Mar 10, 2025Imitation learning is a promising approach for learning robot policies with user-provided data. The way demonstrations are provided, i.e., demonstration modality, influences the quality of the data. While existing research shows that kinesthetic teaching (physically guiding the robot) is preferred by users for the intuitiveness and ease of use, the majority of existing manipulation datasets were collected through teleoperation via a VR controller or spacemouse. In this work, we investigate how different demonstration modalities impact downstream learning performance as well as user experience. Specifically, we compare low-cost demonstration modalities including kinesthetic teaching, teleoperation with a VR controller, and teleoperation with a spacemouse controller. We experiment with three table-top manipulation tasks with different motion constraints. We evaluate and compare imitation learning performance using data from different demonstration modalities, and collected subjective feedback on user experience. Our results show that kinesthetic teaching is rated the most intuitive for controlling the robot and provides cleanest data for best downstream learning performance. However, it is not preferred as the way for large-scale data collection due to the physical load. Based on such insight, we propose a simple data collection scheme that relies on a small number of kinesthetic demonstrations mixed with data collected through teleoperation to achieve the best overall learning performance while maintaining low data-collection effort.
Shared Autonomy for Proximal Teaching
Feb 27, 2025Motor skill learning often requires experienced professionals who can provide personalized instruction. Unfortunately, the availability of high-quality training can be limited for specialized tasks, such as high performance racing. Several recent works have leveraged AI-assistance to improve instruction of tasks ranging from rehabilitation to surgical robot tele-operation. However, these works often make simplifying assumptions on the student learning process, and fail to model how a teacher's assistance interacts with different individuals' abilities when determining optimal teaching strategies. Inspired by the idea of scaffolding from educational psychology, we leverage shared autonomy, a framework for combining user inputs with robot autonomy, to aid with curriculum design. Our key insight is that the way a student's behavior improves in the presence of assistance from an autonomous agent can highlight which sub-skills might be most ``learnable'' for the student, or within their Zone of Proximal Development. We use this to design Z-COACH, a method for using shared autonomy to provide personalized instruction targeting interpretable task sub-skills. In a user study (n=50), where we teach high performance racing in a simulated environment of the Thunderhill Raceway Park with the CARLA Autonomous Driving simulator, we show that Z-COACH helps identify which skills each student should first practice, leading to an overall improvement in driving time, behavior, and smoothness. Our work shows that increasingly available semi-autonomous capabilities (e.g. in vehicles, robots) can not only assist human users, but also help *teach* them.
Statistical Guarantees for Lifelong Reinforcement Learning using PAC-Bayesian Theory
Nov 01, 2024


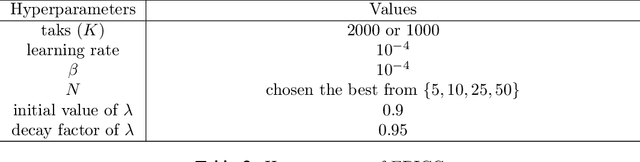
Lifelong reinforcement learning (RL) has been developed as a paradigm for extending single-task RL to more realistic, dynamic settings. In lifelong RL, the "life" of an RL agent is modeled as a stream of tasks drawn from a task distribution. We propose EPIC (\underline{E}mpirical \underline{P}AC-Bayes that \underline{I}mproves \underline{C}ontinuously), a novel algorithm designed for lifelong RL using PAC-Bayes theory. EPIC learns a shared policy distribution, referred to as the \textit{world policy}, which enables rapid adaptation to new tasks while retaining valuable knowledge from previous experiences. Our theoretical analysis establishes a relationship between the algorithm's generalization performance and the number of prior tasks preserved in memory. We also derive the sample complexity of EPIC in terms of RL regret. Extensive experiments on a variety of environments demonstrate that EPIC significantly outperforms existing methods in lifelong RL, offering both theoretical guarantees and practical efficacy through the use of the world policy.
FlowRetrieval: Flow-Guided Data Retrieval for Few-Shot Imitation Learning
Aug 29, 2024Few-shot imitation learning relies on only a small amount of task-specific demonstrations to efficiently adapt a policy for a given downstream tasks. Retrieval-based methods come with a promise of retrieving relevant past experiences to augment this target data when learning policies. However, existing data retrieval methods fall under two extremes: they either rely on the existence of exact behaviors with visually similar scenes in the prior data, which is impractical to assume; or they retrieve based on semantic similarity of high-level language descriptions of the task, which might not be that informative about the shared low-level behaviors or motions across tasks that is often a more important factor for retrieving relevant data for policy learning. In this work, we investigate how we can leverage motion similarity in the vast amount of cross-task data to improve few-shot imitation learning of the target task. Our key insight is that motion-similar data carries rich information about the effects of actions and object interactions that can be leveraged during few-shot adaptation. We propose FlowRetrieval, an approach that leverages optical flow representations for both extracting similar motions to target tasks from prior data, and for guiding learning of a policy that can maximally benefit from such data. Our results show FlowRetrieval significantly outperforms prior methods across simulated and real-world domains, achieving on average 27% higher success rate than the best retrieval-based prior method. In the Pen-in-Cup task with a real Franka Emika robot, FlowRetrieval achieves 3.7x the performance of the baseline imitation learning technique that learns from all prior and target data. Website: https://flow-retrieval.github.io