 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimating cognitive biases with attention-aware inverse planning
Oct 29, 2025



People's goal-directed behaviors are influenced by their cognitive biases, and autonomous systems that interact with people should be aware of this. For example, people's attention to objects in their environment will be biased in a way that systematically affects how they perform everyday tasks such as driving to work. Here, building on recent work in computational cognitive science, we formally articulate the attention-aware inverse planning problem, in which the goal is to estimate a person's attentional biases from their actions. We demonstrate how attention-aware inverse planning systematically differs from standard inverse reinforcement learning and how cognitive biases can be inferred from behavior. Finally, we present an approach to attention-aware inverse planning that combines deep reinforcement learning with computational cognitive modeling. We use this approach to infer the attentional strategies of RL agents in real-life driving scenarios selected from the Waymo Open Dataset, demonstrating the scalability of estimating cognitive biases with attention-aware inverse planning.
SimCoachCorpus: A naturalistic dataset with language and trajectories for embodied teaching
Sep 18, 2025Curated datasets are essential for training and evaluating AI approaches, but are often lacking in domains where language and physical action are deeply intertwined. In particular, few datasets capture how people acquire embodied skills through verbal instruction over time. To address this gap, we introduce SimCoachCorpus: a unique dataset of race car simulator driving that allows for the investigation of rich interactive phenomena during guided and unguided motor skill acquisition. In this dataset, 29 humans were asked to drive in a simulator around a race track for approximately ninety minutes. Fifteen participants were given personalized one-on-one instruction from a professional performance driving coach, and 14 participants drove without coaching. \name\ includes embodied features such as vehicle state and inputs, map (track boundaries and raceline), and cone landmarks. These are synchronized with concurrent verbal coaching from a professional coach and additional feedback at the end of each lap. We further provide annotations of coaching categories for each concurrent feedback utterance, ratings on students' compliance with coaching advice, and self-reported cognitive load and emotional state of participants (gathered from surveys during the study). The dataset includes over 20,000 concurrent feedback utterances, over 400 terminal feedback utterances, and over 40 hours of vehicle driving data. Our naturalistic dataset can be used for investigating motor learning dynamics, exploring linguistic phenomena, and training computational models of teaching. We demonstrate applications of this dataset for in-context learning, imitation learning, and topic modeling. The dataset introduced in this work will be released publicly upon publication of the peer-reviewed version of this paper. Researchers interested in early access may register at https://tinyurl.com/SimCoachCorpusForm.
Shared Autonomy for Proximal Teaching
Feb 27, 2025Motor skill learning often requires experienced professionals who can provide personalized instruction. Unfortunately, the availability of high-quality training can be limited for specialized tasks, such as high performance racing. Several recent works have leveraged AI-assistance to improve instruction of tasks ranging from rehabilitation to surgical robot tele-operation. However, these works often make simplifying assumptions on the student learning process, and fail to model how a teacher's assistance interacts with different individuals' abilities when determining optimal teaching strategies. Inspired by the idea of scaffolding from educational psychology, we leverage shared autonomy, a framework for combining user inputs with robot autonomy, to aid with curriculum design. Our key insight is that the way a student's behavior improves in the presence of assistance from an autonomous agent can highlight which sub-skills might be most ``learnable'' for the student, or within their Zone of Proximal Development. We use this to design Z-COACH, a method for using shared autonomy to provide personalized instruction targeting interpretable task sub-skills. In a user study (n=50), where we teach high performance racing in a simulated environment of the Thunderhill Raceway Park with the CARLA Autonomous Driving simulator, we show that Z-COACH helps identify which skills each student should first practice, leading to an overall improvement in driving time, behavior, and smoothness. Our work shows that increasingly available semi-autonomous capabilities (e.g. in vehicles, robots) can not only assist human users, but also help *teach* them.
Dreaming to Assist: Learning to Align with Human Objectives for Shared Control in High-Speed Racing
Oct 14, 2024Tight coordination is required for effective human-robot teams in domains involving fast dynamics and tactical decisions, such as multi-car racing. In such settings, robot teammates must react to cues of a human teammate's tactical objective to assist in a way that is consistent with the objective (e.g., navigating left or right around an obstacle). To address this challenge, we present Dream2Assist, a framework that combines a rich world model able to infer human objectives and value functions, and an assistive agent that provides appropriate expert assistance to a given human teammate. Our approach builds on a recurrent state space model to explicitly infer human intents, enabling the assistive agent to select actions that align with the human and enabling a fluid teaming interaction. We demonstrate our approach in a high-speed racing domain with a population of synthetic human drivers pursuing mutually exclusive objectives, such as "stay-behind" and "overtake". We show that the combined human-robot team, when blending its actions with those of the human, outperforms the synthetic humans alone as well as several baseline assistance strategies, and that intent-conditioning enables adherence to human preferences during task execution, leading to improved performance while satisfying the human's objective.
Computational Teaching for Driving via Multi-Task Imitation Learning
Oct 02, 2024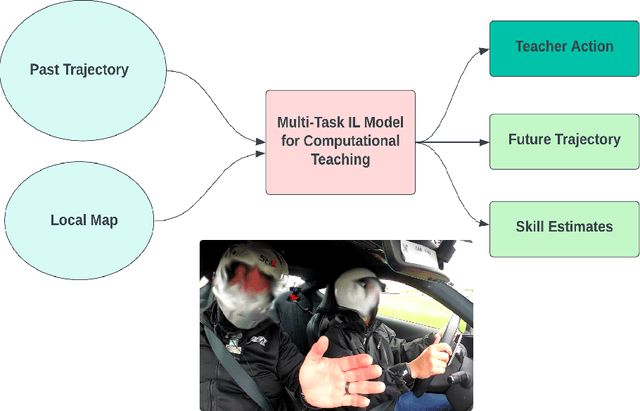
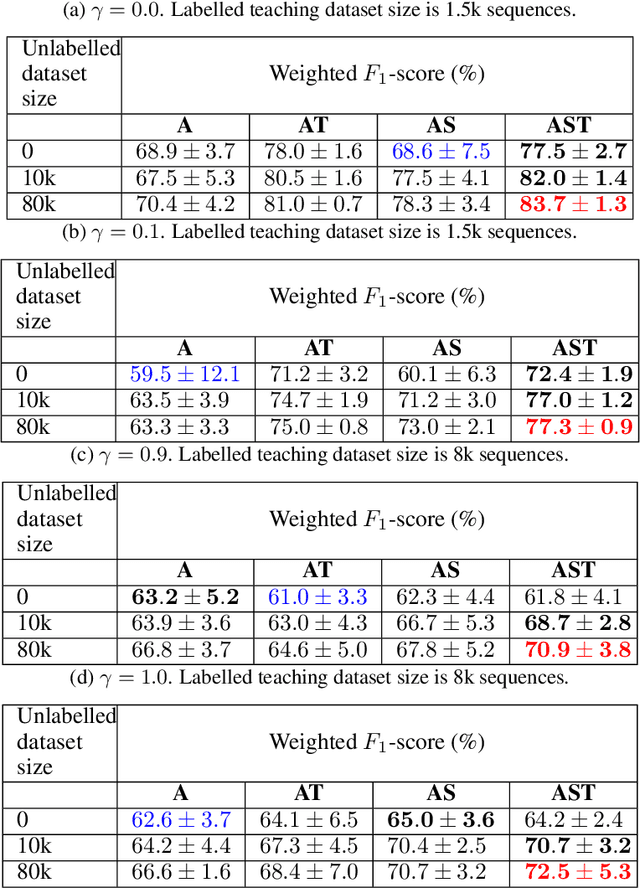
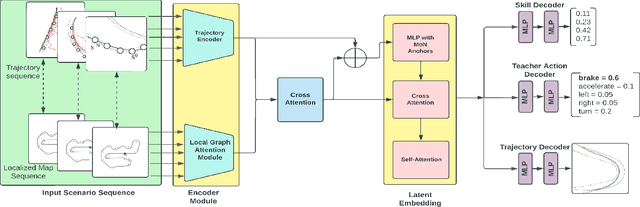
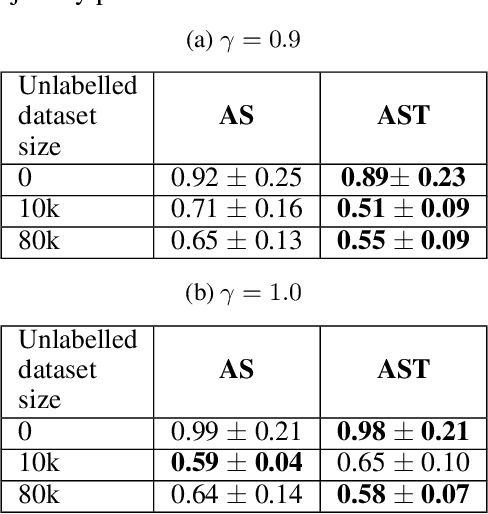
Learning motor skills for sports or performance driving is often done with professional instruction from expert human teachers, whose availability is limited. Our goal is to enable automated teaching via a learned model that interacts with the student similar to a human teacher. However, training such automated teaching systems is limited by the availability of high-quality annotated datasets of expert teacher and student interactions that are difficult to collect at scale. To address this data scarcity problem, we propose an approach for training a coaching system for complex motor tasks such as high performance driving via a Multi-Task Imitation Learning (MTIL) paradigm. MTIL allows our model to learn robust representations by utilizing self-supervised training signals from more readily available non-interactive datasets of humans performing the task of interest. We validate our approach with (1) a semi-synthetic dataset created from real human driving trajectories, (2) a professional track driving instruction dataset, (3) a track-racing driving simulator human-subject study, and (4) a system demonstration on an instrumented car at a race track. Our experiments show that the right set of auxiliary machine learning tasks improves performance in predicting teaching instructions. Moreover, in the human subjects study, students exposed to the instructions from our teaching system improve their ability to stay within track limits, and show favorable perception of the model's interaction with them, in terms of usefulness and satisfaction.
MAVERIC: A Data-Driven Approach to Personalized Autonomous Driving
Jan 20, 2023
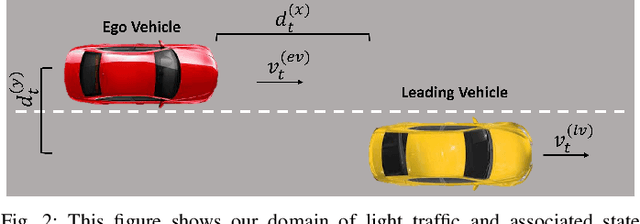
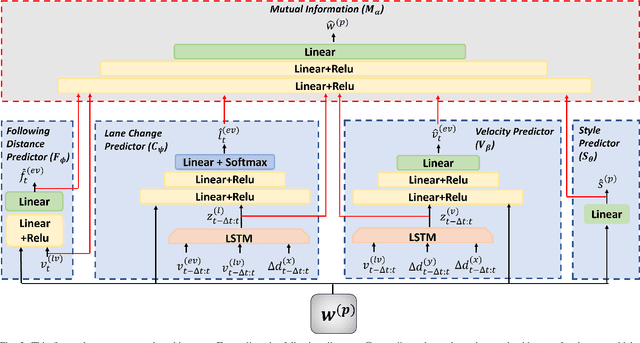
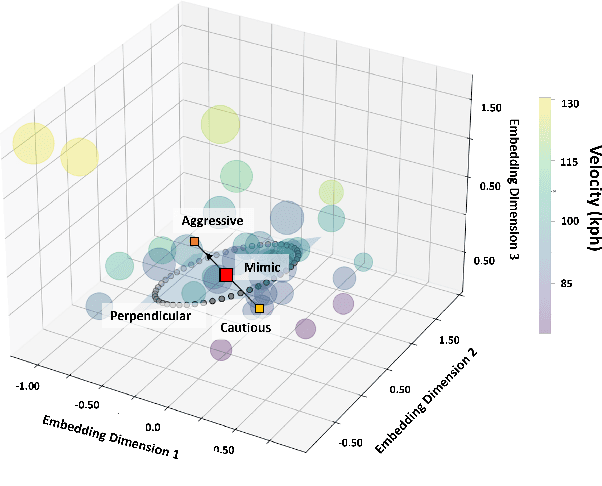
Personalization of autonomous vehicles (AV) may significantly increase trust, use, and acceptance. In particular, we hypothesize that the similarity of an AV's driving style compared to the end-user's driving style will have a major impact on end-user's willingness to use the AV. To investigate the impact of driving style on user acceptance, we 1) develop a data-driven approach to personalize driving style and 2) demonstrate that personalization significantly impacts attitudes towards AVs. Our approach learns a high-level model that tunes low-level controllers to ensure safe and personalized control of the AV. The key to our approach is learning an informative, personalized embedding that represents a user's driving style. Our framework is capable of calibrating the level of aggression so as to optimize driving style based upon driver preference. Across two human subject studies (n = 54), we first demonstrate our approach mimics the driving styles of end-users and can tune attributes of style (e.g., aggressiveness). Second, we investigate the factors (e.g., trust, personality etc.) that impact homophily, i.e. an individual's preference for a driving style similar to their own. We find that our approach generates driving styles consistent with end-user styles (p<.001) and participants rate our approach as more similar to their level of aggressiveness (p=.002). We find that personality (p<.001), perceived similarity (p<.001), and high-velocity driving style (p=.0031) significantly modulate the effect of homophily.
Machine learning reveals how personalized climate communication can both succeed and backfire
Sep 10, 2021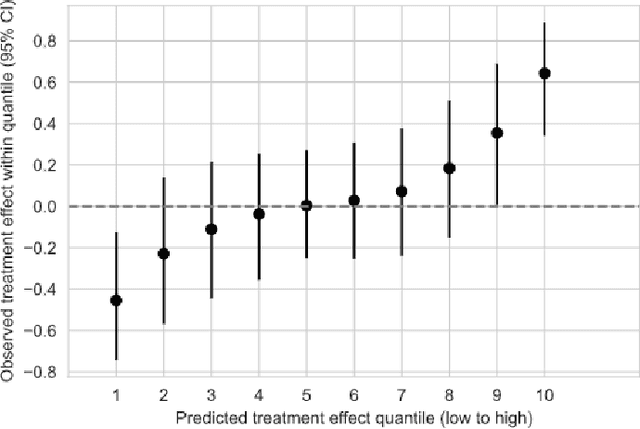
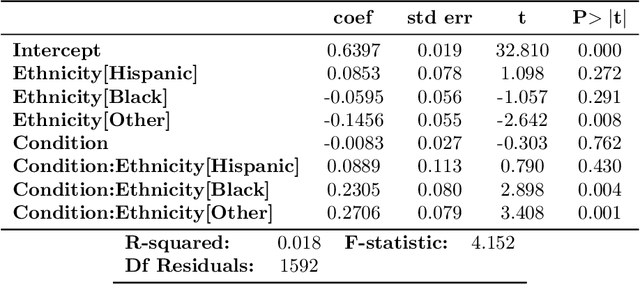
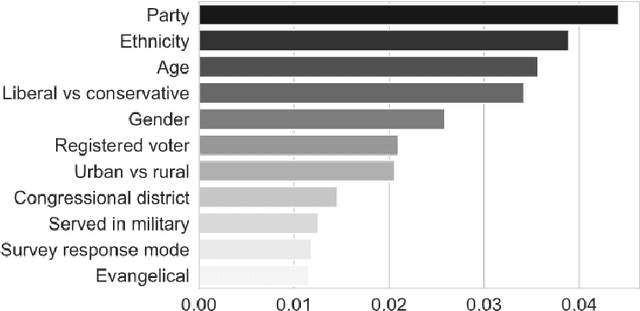
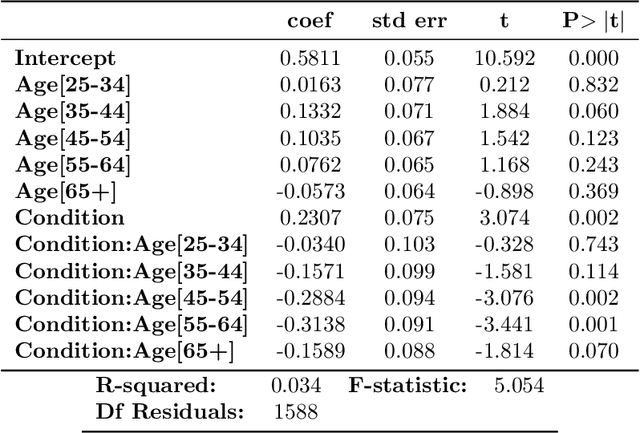
Different advertising messages work for different people. Machine learning can be an effective way to personalise climate communications. In this paper we use machine learning to reanalyse findings from a recent study, showing that online advertisements increased some people's belief in climate change while resulting in decreased belief in others. In particular, we show that the effect of the advertisements could change depending on people's age and ethnicity.