 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Preference Learning Approach to Develop Safe and Personalizable Autonomous Vehicles
Oct 30, 2023This work introduces a preference learning method that ensures adherence to traffic rules for autonomous vehicles. Our approach incorporates priority ordering of signal temporal logic (STL) formulas, describing traffic rules, into a learning framework. By leveraging the parametric weighted signal temporal logic (PWSTL), we formulate the problem of safety-guaranteed preference learning based on pairwise comparisons, and propose an approach to solve this learning problem. Our approach finds a feasible valuation for the weights of the given PWSTL formula such that, with these weights, preferred signals have weighted quantitative satisfaction measures greater than their non-preferred counterparts. The feasible valuation of weights given by our approach leads to a weighted STL formula which can be used in correct-and-custom-by-construction controller synthesis. We demonstrate the performance of our method with human subject studies in two different simulated driving scenarios involving a stop sign and a pedestrian crossing. Our approach yields competitive results compared to existing preference learning methods in terms of capturing preferences, and notably outperforms them when safety is considered.
MAVERIC: A Data-Driven Approach to Personalized Autonomous Driving
Jan 20, 2023
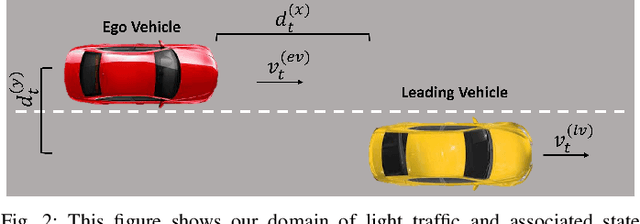
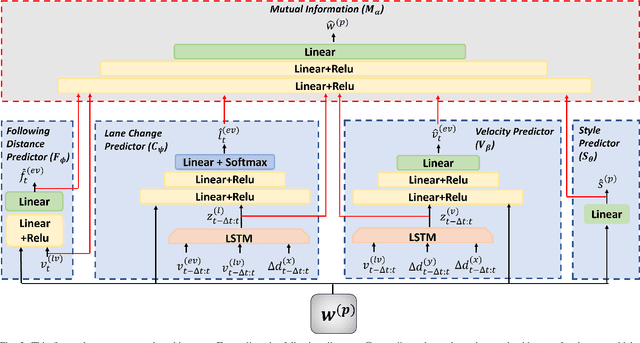
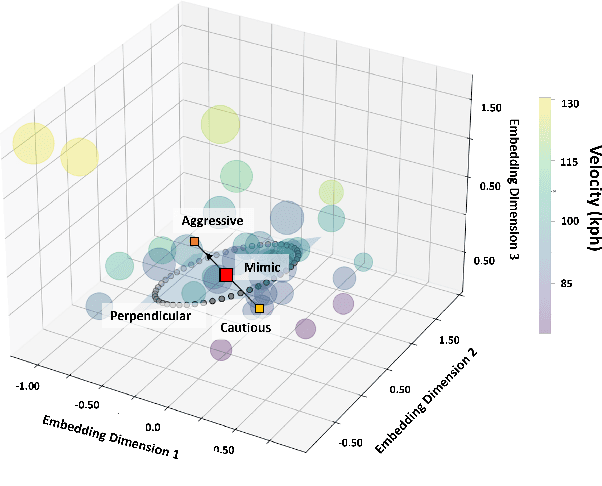
Personalization of autonomous vehicles (AV) may significantly increase trust, use, and acceptance. In particular, we hypothesize that the similarity of an AV's driving style compared to the end-user's driving style will have a major impact on end-user's willingness to use the AV. To investigate the impact of driving style on user acceptance, we 1) develop a data-driven approach to personalize driving style and 2) demonstrate that personalization significantly impacts attitudes towards AVs. Our approach learns a high-level model that tunes low-level controllers to ensure safe and personalized control of the AV. The key to our approach is learning an informative, personalized embedding that represents a user's driving style. Our framework is capable of calibrating the level of aggression so as to optimize driving style based upon driver preference. Across two human subject studies (n = 54), we first demonstrate our approach mimics the driving styles of end-users and can tune attributes of style (e.g., aggressiveness). Second, we investigate the factors (e.g., trust, personality etc.) that impact homophily, i.e. an individual's preference for a driving style similar to their own. We find that our approach generates driving styles consistent with end-user styles (p<.001) and participants rate our approach as more similar to their level of aggressiveness (p=.002). We find that personality (p<.001), perceived similarity (p<.001), and high-velocity driving style (p=.0031) significantly modulate the effect of homophily.
SPA: Verbal Interactions between Agents and Avatars in Shared Virtual Environments using Propositional Planning
Feb 08, 2020

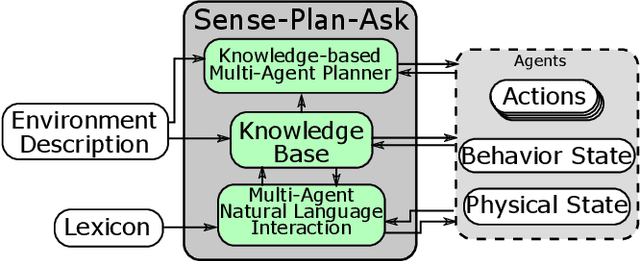

We present a novel approach for generating plausible verbal interactions between virtual human-like agents and user avatars in shared virtual environments. Sense-Plan-Ask, or SPA, extends prior work in propositional planning and natural language processing to enable agents to plan with uncertain information, and leverage question and answer dialogue with other agents and avatars to obtain the needed information and complete their goals. The agents are additionally able to respond to questions from the avatars and other agents using natural-language enabling real-time multi-agent multi-avatar communication environments. Our algorithm can simulate tens of virtual agents at interactive rates interacting, moving, communicating, planning, and replanning. We find that our algorithm creates a small runtime cost and enables agents to complete their goals more effectively than agents without the ability to leverage natural-language communication. We demonstrate quantitative results on a set of simulated benchmarks and detail the results of a preliminary user-study conducted to evaluate the plausibility of the virtual interactions generated by SPA. Overall, we find that participants prefer SPA to prior techniques in 84\% of responses including significant benefits in terms of the plausibility of natural-language interactions and the positive impact of those interactions.
Automatic Testing and Falsification with Dynamically Constrained Reinforcement Learning
Oct 30, 2019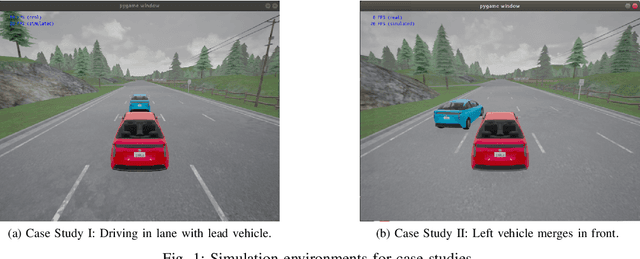
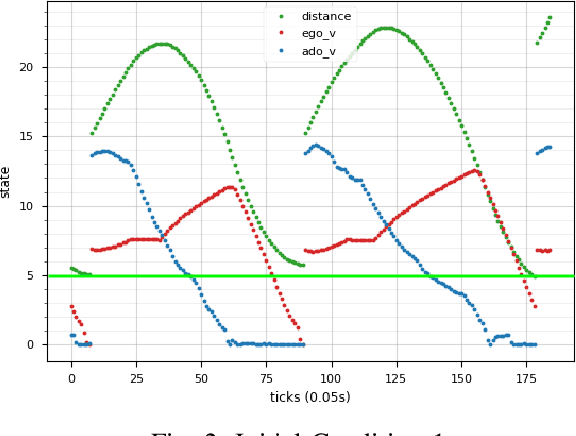
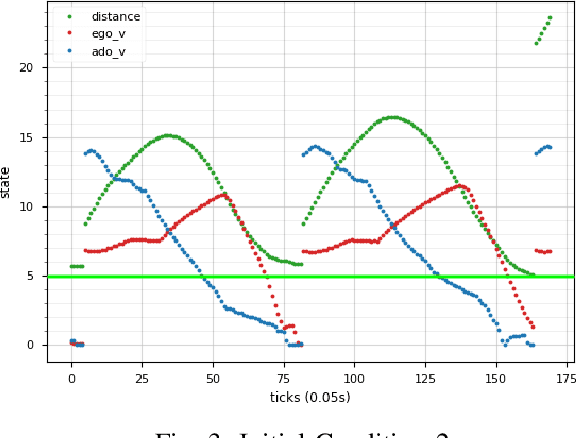
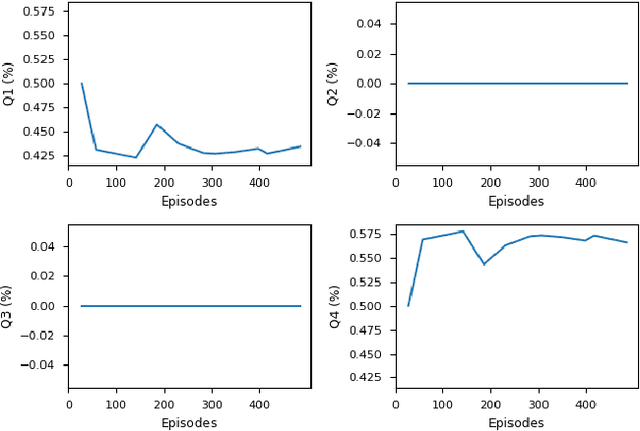
We consider the problem of using reinforcement learning to train adversarial agents for automatic testing and falsification of cyberphysical systems, such as autonomous vehicles, robots, and airplanes. In order to produce useful agents, however, it is useful to be able to control the degree of adversariality by specifying rules that an agent must follow. For example, when testing an autonomous vehicle, it is useful to find maximally antagonistic traffic participants that obey traffic rules. We model dynamic constraints as hierarchically ordered rules expressed in Signal Temporal Logic, and show how these can be incorporated into an agent training process. We prove that our agent-centric approach is able to find all dangerous behaviors that can be found by traditional falsification techniques while producing modular and reusable agents. We demonstrate our approach on two case studies from the automotive domain.
AutonoVi: Autonomous Vehicle Planning with Dynamic Maneuvers and Traffic Constraints
Mar 29, 2017
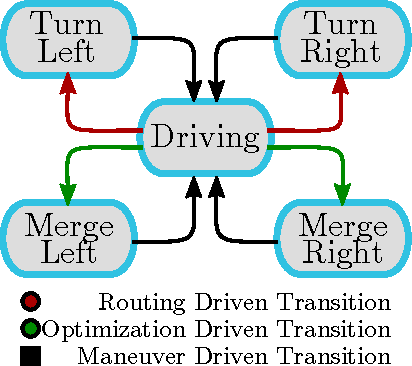


We present AutonoVi:, a novel algorithm for autonomous vehicle navigation that supports dynamic maneuvers and satisfies traffic constraints and norms. Our approach is based on optimization-based maneuver planning that supports dynamic lane-changes, swerving, and braking in all traffic scenarios and guides the vehicle to its goal position. We take into account various traffic constraints, including collision avoidance with other vehicles, pedestrians, and cyclists using control velocity obstacles. We use a data-driven approach to model the vehicle dynamics for control and collision avoidance. Furthermore, our trajectory computation algorithm takes into account traffic rules and behaviors, such as stopping at intersections and stoplights, based on an arc-spline representation. We have evaluated our algorithm in a simulated environment and tested its interactive performance in urban and highway driving scenarios with tens of vehicles, pedestrians, and cyclists. These scenarios include jaywalking pedestrians, sudden stops from high speeds, safely passing cyclists, a vehicle suddenly swerving into the roadway, and high-density traffic where the vehicle must change lanes to progress more effectively.