 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonoVi: Autonomous Vehicle Planning with Dynamic Maneuvers and Traffic Constraints
Paper and Code
Mar 29, 2017
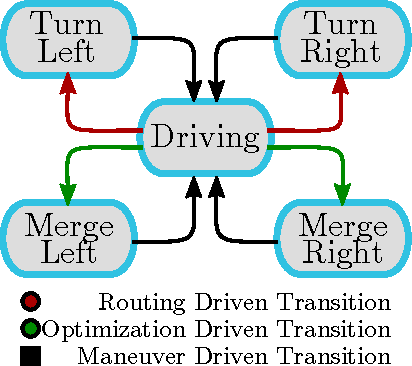


We present AutonoVi:, a novel algorithm for autonomous vehicle navigation that supports dynamic maneuvers and satisfies traffic constraints and norms. Our approach is based on optimization-based maneuver planning that supports dynamic lane-changes, swerving, and braking in all traffic scenarios and guides the vehicle to its goal position. We take into account various traffic constraints, including collision avoidance with other vehicles, pedestrians, and cyclists using control velocity obstacles. We use a data-driven approach to model the vehicle dynamics for control and collision avoidance. Furthermore, our trajectory computation algorithm takes into account traffic rules and behaviors, such as stopping at intersections and stoplights, based on an arc-spline representation. We have evaluated our algorithm in a simulated environment and tested its interactive performance in urban and highway driving scenarios with tens of vehicles, pedestrians, and cyclists. These scenarios include jaywalking pedestrians, sudden stops from high speeds, safely passing cyclists, a vehicle suddenly swerving into the roadway, and high-density traffic where the vehicle must change lanes to progress more effectively.