 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBack-propagation through Signal Temporal Logic Specifications: Infusing Logical Structure into Gradient-Based Methods
Jul 31, 2020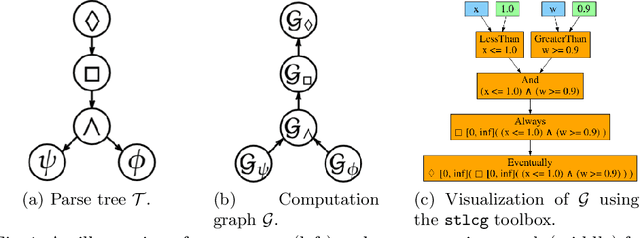
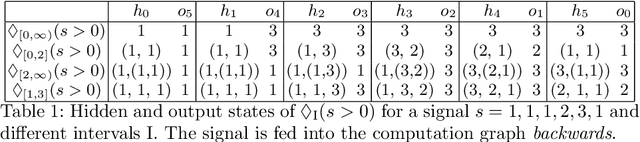
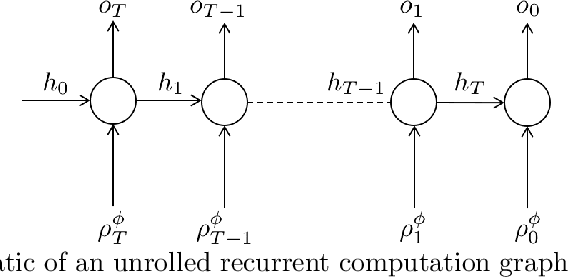
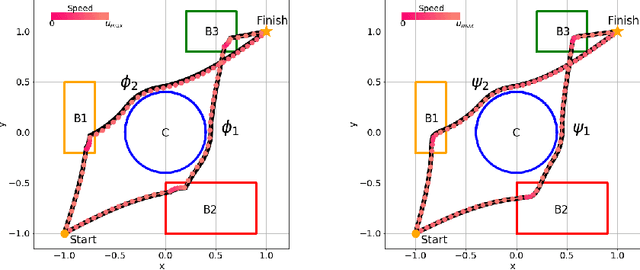
This paper presents a technique, named STLCG, to compute the quantitative semantics of Signal Temporal Logic (STL) formulas using computation graphs. STLCG provides a platform which enables the incorporation of logical specifications into robotics problems that benefit from gradient-based solutions. Specifically, STL is a powerful and expressive formal language that can specify spatial and temporal properties of signals generated by both continuous and hybrid systems. The quantitative semantics of STL provide a robustness metric, i.e., how much a signal satisfies or violates an STL specification. In this work, we devise a systematic methodology for translating STL robustness formulas into computation graphs. With this representation, and by leveraging off-the-shelf automatic differentiation tools, we are able to back-propagate through STL robustness formulas and hence enable a natural and easy-to-use integration with many gradient-based approaches used in robotics. We demonstrate, through examples stemming from various robotics applications, that STLCG is versatile, computationally efficient, and capable of injecting human-domain knowledge into the problem formulation.
Automatic Testing and Falsification with Dynamically Constrained Reinforcement Learning
Oct 30, 2019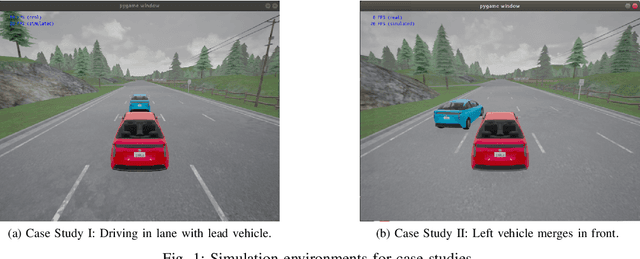
We consider the problem of using reinforcement learning to train adversarial agents for automatic testing and falsification of cyberphysical systems, such as autonomous vehicles, robots, and airplanes. In order to produce useful agents, however, it is useful to be able to control the degree of adversariality by specifying rules that an agent must follow. For example, when testing an autonomous vehicle, it is useful to find maximally antagonistic traffic participants that obey traffic rules. We model dynamic constraints as hierarchically ordered rules expressed in Signal Temporal Logic, and show how these can be incorporated into an agent training process. We prove that our agent-centric approach is able to find all dangerous behaviors that can be found by traditional falsification techniques while producing modular and reusable agents. We demonstrate our approach on two case studies from the automotive domain.