 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStressDream: Steering Video World Models for Robust Policy Evaluation and Improvement
May 29, 2026Video world models (WMs) have shown promise for policy evaluation and improvement by imagining realistic future observations conditioned on ego-robot actions. While WMs can model distributions over futures, policy evaluation and improvement typically rely on nominal imaginations, which can miss high-impact outcomes of robot actions unless prohibitively many samples are drawn. To enable robust policy evaluation and improvement over WM imaginations, we propose StressDream, which steers imaginations toward high-impact yet plausible outcomes specified at inference time by optimizing the initial noise of diffusion-based WMs. However, optimizing high-dimensional noise is challenging: the optimization must reason about nuanced, scene-dependent target events in generated videos while avoiding out-of-distribution (OOD) noise that yields implausible imaginations. We address this with two complementary objectives: a semantic objective with a Vision-Language Model that provides informative gradients by reasoning about the generated video, and a plausibility objective that prevents the optimized noise from drifting OOD. With state-of-the-art video world models for autonomous driving and robotic manipulation, we show that StressDream effectively steers imaginations toward high-impact yet plausible outcomes specified by text at inference time, such as task failures, enabling robust policy evaluation and improvement by identifying actions whose plausible futures include undesirable outcomes. Video results are available at https://junwon.me/StressDream/.
Runtime Monitoring of Perception-Based Autonomous Systems via Embedding Temporal Logic
May 14, 2026Runtime monitoring of autonomous systems traditionally relies on mapping continuous sensor observations to discrete logical propositions defined over low-dimensional state variables. This abstraction breaks down in perception-driven settings, where such mappings require additional learned modules that are often computationally expensive, brittle, and semantically misaligned. In this work, we propose Embedding Temporal Logic (ETL), a temporal logic that performs monitoring directly in learned embedding spaces. ETL defines predicates through distances between observed embeddings and target embeddings derived from reference observations. This formulation allows specifications to capture high-level perceptual concepts, such as similarity to visual goals or avoidance of semantic regions, that are difficult or impossible to express using traditional predicates. By composing these predicates with temporal operators, ETL naturally expresses temporally extended and sequential perceptual behaviors. We introduce ETL monitors for evaluating specifications over bounded embedding traces, along with a conformal calibration procedure that provides reliable and safety-oriented predicate evaluation. We evaluate our approach across multiple manipulation environments to show that ETL achieves strong empirical agreement with ground-truth semantics, including accurate monitoring of temporally composed behaviors.
Learning Probabilistic Responsibility Allocations for Multi-Agent Interactions
Apr 13, 2026Human behavior in interactive settings is shaped not only by individual objectives but also by shared constraints with others, such as safety. Understanding how people allocate responsibility, i.e., how much one deviates from their desired policy to accommodate others, can inform the design of socially compliant and trustworthy autonomous systems. In this work, we introduce a method for learning a probabilistic responsibility allocation model that captures the multimodal uncertainty inherent in multi-agent interactions. Specifically, our approach leverages the latent space of a conditional variational autoencoder, combined with techniques from multi-agent trajectory forecasting, to learn a distribution over responsibility allocations conditioned on scene and agent context. Although ground-truth responsibility labels are unavailable, the model remains tractable by incorporating a differentiable optimization layer that maps responsibility allocations to induced controls, which are available. We evaluate our method on the INTERACTION driving dataset and demonstrate that it not only achieves strong predictive performance but also provides interpretable insights, through the lens of responsibility, into patterns of multi-agent interaction.
Safe Probabilistic Planning for Human-Robot Interaction using Conformal Risk Control
Mar 11, 2026In this paper, we present a novel probabilistic safe control framework for human-robot interaction that combines control barrier functions (CBFs) with conformal risk control to provide formal safety guarantees while considering complex human behavior. The approach uses conformal risk control to quantify and control the prediction errors in CBF safety values and establishes formal guarantees on the probability of constraint satisfaction during interaction. We introduce an algorithm that dynamically adjusts the safety margins produced by conformal risk control based on the current interaction context. Through experiments on human-robot navigation scenarios, we demonstrate that our approach significantly reduces collision rates and safety violations as compared to baseline methods while maintaining high success rates in goal-reaching tasks and efficient control. The code, simulations, and other supplementary material can be found on the project website: https://jakeagonzales.github.io/crc-cbf-website/.
Pretrained Embeddings as a Behavior Specification Mechanism
Mar 03, 2025We propose an approach to formally specifying the behavioral properties of systems that rely on a perception model for interactions with the physical world. The key idea is to introduce embeddings -- mathematical representations of a real-world concept -- as a first-class construct in a specification language, where properties are expressed in terms of distances between a pair of ideal and observed embeddings. To realize this approach, we propose a new type of temporal logic called Embedding Temporal Logic (ETL), and describe how it can be used to express a wider range of properties about AI-enabled systems than previously possible. We demonstrate the applicability of ETL through a preliminary evaluation involving planning tasks in robots that are driven by foundation models; the results are promising, showing that embedding-based specifications can be used to steer a system towards desirable behaviors.
Surprise Potential as a Measure of Interactivity in Driving Scenarios
Feb 08, 2025Validating the safety and performance of an autonomous vehicle (AV) requires benchmarking on real-world driving logs. However, typical driving logs contain mostly uneventful scenarios with minimal interactions between road users. Identifying interactive scenarios in real-world driving logs enables the curation of datasets that amplify critical signals and provide a more accurate assessment of an AV's performance. In this paper, we present a novel metric that identifies interactive scenarios by measuring an AV's surprise potential on others. First, we identify three dimensions of the design space to describe a family of surprise potential measures. Second, we exhaustively evaluate and compare different instantiations of the surprise potential measure within this design space on the nuScenes dataset. To determine how well a surprise potential measure correctly identifies an interactive scenario, we use a reward model learned from human preferences to assess alignment with human intuition. Our proposed surprise potential, arising from this exhaustive comparative study, achieves a correlation of more than 0.82 with the human-aligned reward function, outperforming existing approaches. Lastly, we validate motion planners on curated interactive scenarios to demonstrate downstream applications.
STLCG++: A Masking Approach for Differentiable Signal Temporal Logic Specification
Jan 08, 2025



Signal Temporal Logic (STL) offers a concise yet expressive framework for specifying and reasoning about spatio-temporal behaviors of robotic systems. Attractively, STL admits the notion of robustness, the degree to which an input signal satisfies or violates an STL specification, thus providing a nuanced evaluation of system performance. Notably, the differentiability of STL robustness enables direct integration to robotics workflows that rely on gradient-based optimization, such as trajectory optimization and deep learning. However, existing approaches to evaluating and differentiating STL robustness rely on recurrent computations, which become inefficient with longer sequences, limiting their use in time-sensitive applications. In this paper, we present STLCG++, a masking-based approach that parallelizes STL robustness evaluation and backpropagation across timesteps, achieving more than 1000x faster computation time than the recurrent approach. We also introduce a smoothing technique for differentiability through time interval bounds, expanding STL's applicability in gradient-based optimization tasks over spatial and temporal variables. Finally, we demonstrate STLCG++'s benefits through three robotics use cases and provide open-source Python libraries in JAX and PyTorch for seamless integration into modern robotics workflows.
Continuous-Time Line-of-Sight Constrained Trajectory Planning for 6-Degree of Freedom Systems
Oct 29, 2024Perception algorithms are ubiquitous in modern autonomy stacks, providing necessary environmental information to operate in the real world. Many of these algorithms depend on the visibility of keypoints, which must remain within the robot's line-of-sight (LoS), for reliable operation. This paper tackles the challenge of maintaining LoS on such keypoints during robot movement. We propose a novel method that addresses these issues by ensuring applicability to various sensor footprints, adaptability to arbitrary nonlinear dynamics, and constant enforcement of LoS throughout the robot's path. Through our experiments, we show that the proposed approach achieves significantly reduced LoS violation and runtime compared to existing state-of-the-art methods in several representative and challenging scenarios.
Learning responsibility allocations for multi-agent interactions: A differentiable optimization approach with control barrier functions
Oct 09, 2024From autonomous driving to package delivery, ensuring safe yet efficient multi-agent interaction is challenging as the interaction dynamics are influenced by hard-to-model factors such as social norms and contextual cues. Understanding these influences can aid in the design and evaluation of socially-aware autonomous agents whose behaviors are aligned with human values. In this work, we seek to codify factors governing safe multi-agent interactions via the lens of responsibility, i.e., an agent's willingness to deviate from their desired control to accommodate safe interaction with others. Specifically, we propose a data-driven modeling approach based on control barrier functions and differentiable optimization that efficiently learns agents' responsibility allocation from data. We demonstrate on synthetic and real-world datasets that we can obtain an interpretable and quantitative understanding of how much agents adjust their behavior to ensure the safety of others given their current environment.
CoBL-Diffusion: Diffusion-Based Conditional Robot Planning in Dynamic Environments Using Control Barrier and Lyapunov Functions
Jun 08, 2024


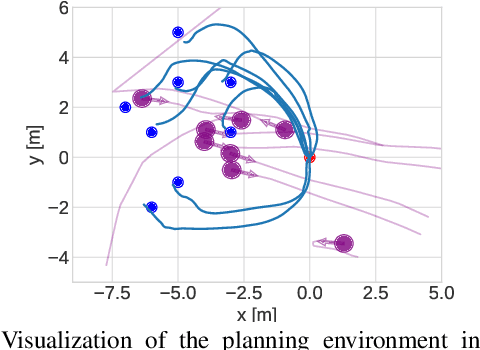
Equipping autonomous robots with the ability to navigate safely and efficiently around humans is a crucial step toward achieving trusted robot autonomy. However, generating robot plans while ensuring safety in dynamic multi-agent environments remains a key challenge. Building upon recent work on leveraging deep generative models for robot planning in static environments, this paper proposes CoBL-Diffusion, a novel diffusion-based safe robot planner for dynamic environments. CoBL-Diffusion uses Control Barrier and Lyapunov functions to guide the denoising process of a diffusion model, iteratively refining the robot control sequence to satisfy the safety and stability constraints. We demonstrate the effectiveness of the proposed model using two settings: a synthetic single-agent environment and a real-world pedestrian dataset. Our results show that CoBL-Diffusion generates smooth trajectories that enable the robot to reach goal locations while maintaining a low collision rate with dynamic obstacles.