 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Probabilistic Planning for Human-Robot Interaction using Conformal Risk Control
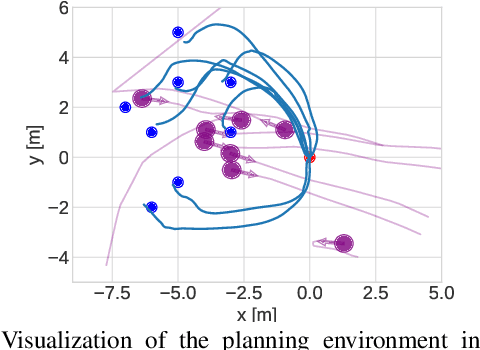
Mar 11, 2026In this paper, we present a novel probabilistic safe control framework for human-robot interaction that combines control barrier functions (CBFs) with conformal risk control to provide formal safety guarantees while considering complex human behavior. The approach uses conformal risk control to quantify and control the prediction errors in CBF safety values and establishes formal guarantees on the probability of constraint satisfaction during interaction. We introduce an algorithm that dynamically adjusts the safety margins produced by conformal risk control based on the current interaction context. Through experiments on human-robot navigation scenarios, we demonstrate that our approach significantly reduces collision rates and safety violations as compared to baseline methods while maintaining high success rates in goal-reaching tasks and efficient control. The code, simulations, and other supplementary material can be found on the project website: https://jakeagonzales.github.io/crc-cbf-website/.
STLCG++: A Masking Approach for Differentiable Signal Temporal Logic Specification
Jan 08, 2025



Signal Temporal Logic (STL) offers a concise yet expressive framework for specifying and reasoning about spatio-temporal behaviors of robotic systems. Attractively, STL admits the notion of robustness, the degree to which an input signal satisfies or violates an STL specification, thus providing a nuanced evaluation of system performance. Notably, the differentiability of STL robustness enables direct integration to robotics workflows that rely on gradient-based optimization, such as trajectory optimization and deep learning. However, existing approaches to evaluating and differentiating STL robustness rely on recurrent computations, which become inefficient with longer sequences, limiting their use in time-sensitive applications. In this paper, we present STLCG++, a masking-based approach that parallelizes STL robustness evaluation and backpropagation across timesteps, achieving more than 1000x faster computation time than the recurrent approach. We also introduce a smoothing technique for differentiability through time interval bounds, expanding STL's applicability in gradient-based optimization tasks over spatial and temporal variables. Finally, we demonstrate STLCG++'s benefits through three robotics use cases and provide open-source Python libraries in JAX and PyTorch for seamless integration into modern robotics workflows.
CoBL-Diffusion: Diffusion-Based Conditional Robot Planning in Dynamic Environments Using Control Barrier and Lyapunov Functions
Jun 08, 2024


Equipping autonomous robots with the ability to navigate safely and efficiently around humans is a crucial step toward achieving trusted robot autonomy. However, generating robot plans while ensuring safety in dynamic multi-agent environments remains a key challenge. Building upon recent work on leveraging deep generative models for robot planning in static environments, this paper proposes CoBL-Diffusion, a novel diffusion-based safe robot planner for dynamic environments. CoBL-Diffusion uses Control Barrier and Lyapunov functions to guide the denoising process of a diffusion model, iteratively refining the robot control sequence to satisfy the safety and stability constraints. We demonstrate the effectiveness of the proposed model using two settings: a synthetic single-agent environment and a real-world pedestrian dataset. Our results show that CoBL-Diffusion generates smooth trajectories that enable the robot to reach goal locations while maintaining a low collision rate with dynamic obstacles.