 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinuous-Time Line-of-Sight Constrained Trajectory Planning for 6-Degree of Freedom Systems
Oct 29, 2024Perception algorithms are ubiquitous in modern autonomy stacks, providing necessary environmental information to operate in the real world. Many of these algorithms depend on the visibility of keypoints, which must remain within the robot's line-of-sight (LoS), for reliable operation. This paper tackles the challenge of maintaining LoS on such keypoints during robot movement. We propose a novel method that addresses these issues by ensuring applicability to various sensor footprints, adaptability to arbitrary nonlinear dynamics, and constant enforcement of LoS throughout the robot's path. Through our experiments, we show that the proposed approach achieves significantly reduced LoS violation and runtime compared to existing state-of-the-art methods in several representative and challenging scenarios.
Set-based value operators for non-stationary Markovian environments
Jul 15, 2022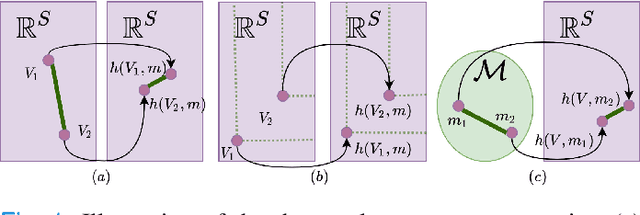
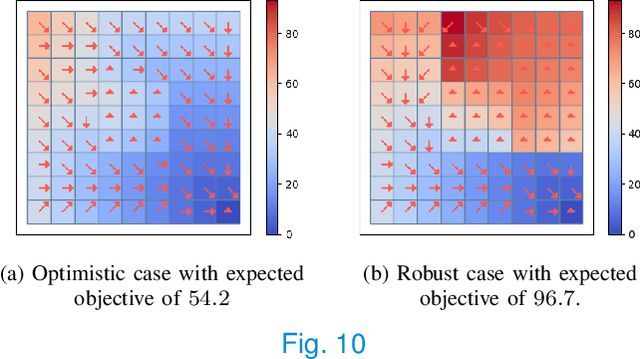
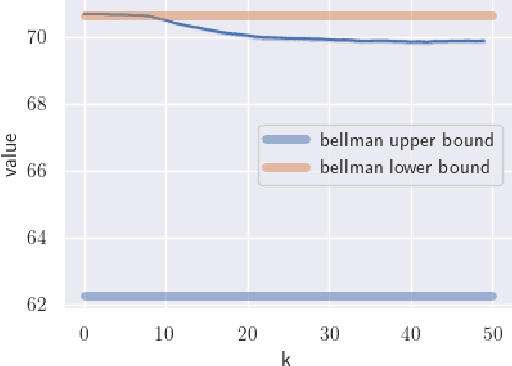
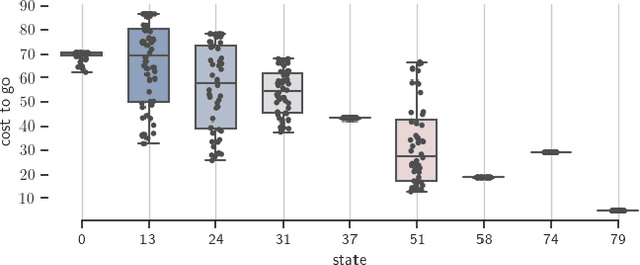
This paper analyzes finite state Markov Decision Processes (MDPs) with uncertain parameters in compact sets and re-examines results from robust MDP via set-based fixed point theory. We generalize the Bellman and policy evaluation operators to operators that contract on the space of value functions and denote them as \emph{value operators}. We generalize these value operators to act on the space of value function sets and denote them as \emph{set-based value operators}. We prove that these set-based value operators are contractions in the space of compact value function sets. Leveraging insights from set theory, we generalize the rectangularity condition for the Bellman operator from classic robust MDP literature to a \emph{containment condition} for a generic value operator, which is weaker and can be applied to a larger set of parameter-uncertain MDPs and contractive operators in dynamic programming and reinforcement learning. We prove that both the rectangularity condition and the containment condition sufficiently ensure that the set-based value operator's fixed point set contains its own supremum and infimum elements. For convex and compact sets of uncertain MDP parameters, we show equivalence between the classic robust value function and the supremum of the fixed point set of the set-based Bellman operator. Under dynamically changing MDP parameters in compact sets, we prove a set convergence result for value iteration, which otherwise may not converge to a single value function.