 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFormal Verification of Neural Certificates Done Dynamically
Jul 16, 2025Neural certificates have emerged as a powerful tool in cyber-physical systems control, providing witnesses of correctness. These certificates, such as barrier functions, often learned alongside control policies, once verified, serve as mathematical proofs of system safety. However, traditional formal verification of their defining conditions typically faces scalability challenges due to exhaustive state-space exploration. To address this challenge, we propose a lightweight runtime monitoring framework that integrates real-time verification and does not require access to the underlying control policy. Our monitor observes the system during deployment and performs on-the-fly verification of the certificate over a lookahead region to ensure safety within a finite prediction horizon. We instantiate this framework for ReLU-based control barrier functions and demonstrate its practical effectiveness in a case study. Our approach enables timely detection of safety violations and incorrect certificates with minimal overhead, providing an effective but lightweight alternative to the static verification of the certificates.
Scalable Interconnect Learning in Boolean Networks
Jul 03, 2025Learned Differentiable Boolean Logic Networks (DBNs) already deliver efficient inference on resource-constrained hardware. We extend them with a trainable, differentiable interconnect whose parameter count remains constant as input width grows, allowing DBNs to scale to far wider layers than earlier learnable-interconnect designs while preserving their advantageous accuracy. To further reduce model size, we propose two complementary pruning stages: an SAT-based logic equivalence pass that removes redundant gates without affecting performance, and a similarity-based, data-driven pass that outperforms a magnitude-style greedy baseline and offers a superior compression-accuracy trade-off.
Logic Gate Neural Networks are Good for Verification
May 26, 2025Learning-based systems are increasingly deployed across various domains, yet the complexity of traditional neural networks poses significant challenges for formal verification. Unlike conventional neural networks, learned Logic Gate Networks (LGNs) replace multiplications with Boolean logic gates, yielding a sparse, netlist-like architecture that is inherently more amenable to symbolic verification, while still delivering promising performance. In this paper, we introduce a SAT encoding for verifying global robustness and fairness in LGNs. We evaluate our method on five benchmark datasets, including a newly constructed 5-class variant, and find that LGNs are both verification-friendly and maintain strong predictive performance.
SAMJAM: Zero-Shot Video Scene Graph Generation for Egocentric Kitchen Videos
Apr 10, 2025Video Scene Graph Generation (VidSGG) is an important topic in understanding dynamic kitchen environments. Current models for VidSGG require extensive training to produce scene graphs. Recently, Vision Language Models (VLM) and Vision Foundation Models (VFM) have demonstrated impressive zero-shot capabilities in a variety of tasks. However, VLMs like Gemini struggle with the dynamics for VidSGG, failing to maintain stable object identities across frames. To overcome this limitation, we propose SAMJAM, a zero-shot pipeline that combines SAM2's temporal tracking with Gemini's semantic understanding. SAM2 also improves upon Gemini's object grounding by producing more accurate bounding boxes. In our method, we first prompt Gemini to generate a frame-level scene graph. Then, we employ a matching algorithm to map each object in the scene graph with a SAM2-generated or SAM2-propagated mask, producing a temporally-consistent scene graph in dynamic environments. Finally, we repeat this process again in each of the following frames. We empirically demonstrate that SAMJAM outperforms Gemini by 8.33% in mean recall on the EPIC-KITCHENS and EPIC-KITCHENS-100 datasets.
Predictive Monitoring of Black-Box Dynamical Systems
Dec 21, 2024



We study the problem of predictive runtime monitoring of black-box dynamical systems with quantitative safety properties. The black-box setting stipulates that the exact semantics of the dynamical system and the controller are unknown, and that we are only able to observe the state of the controlled (aka, closed-loop) system at finitely many time points. We present a novel framework for predicting future states of the system based on the states observed in the past. The numbers of past states and of predicted future states are parameters provided by the user. Our method is based on a combination of Taylor's expansion and the backward difference operator for numerical differentiation. We also derive an upper bound on the prediction error under the assumption that the system dynamics and the controller are smooth. The predicted states are then used to predict safety violations ahead in time. Our experiments demonstrate practical applicability of our method for complex black-box systems, showing that it is computationally lightweight and yet significantly more accurate than the state-of-the-art predictive safety monitoring techniques.
Neural Control and Certificate Repair via Runtime Monitoring
Dec 17, 2024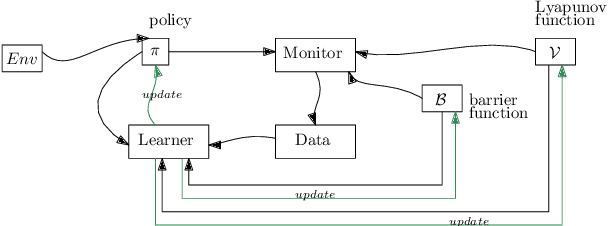

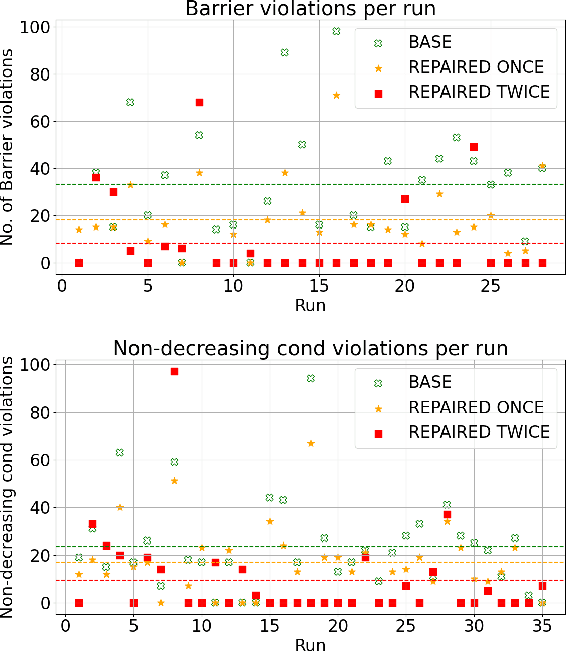

Learning-based methods provide a promising approach to solving highly non-linear control tasks that are often challenging for classical control methods. To ensure the satisfaction of a safety property, learning-based methods jointly learn a control policy together with a certificate function for the property. Popular examples include barrier functions for safety and Lyapunov functions for asymptotic stability. While there has been significant progress on learning-based control with certificate functions in the white-box setting, where the correctness of the certificate function can be formally verified, there has been little work on ensuring their reliability in the black-box setting where the system dynamics are unknown. In this work, we consider the problems of certifying and repairing neural network control policies and certificate functions in the black-box setting. We propose a novel framework that utilizes runtime monitoring to detect system behaviors that violate the property of interest under some initially trained neural network policy and certificate. These violating behaviors are used to extract new training data, that is used to re-train the neural network policy and the certificate function and to ultimately repair them. We demonstrate the effectiveness of our approach empirically by using it to repair and to boost the safety rate of neural network policies learned by a state-of-the-art method for learning-based control on two autonomous system control tasks.