 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConsistency Training Helps Stop Sycophancy and Jailbreaks
Oct 31, 2025An LLM's factuality and refusal training can be compromised by simple changes to a prompt. Models often adopt user beliefs (sycophancy) or satisfy inappropriate requests which are wrapped within special text (jailbreaking). We explore \emph{consistency training}, a self-supervised paradigm that teaches a model to be invariant to certain irrelevant cues in the prompt. Instead of teaching the model what exact response to give on a particular prompt, we aim to teach the model to behave identically across prompt data augmentations (like adding leading questions or jailbreak text). We try enforcing this invariance in two ways: over the model's external outputs (\emph{Bias-augmented Consistency Training} (BCT) from Chua et al. [2025]) and over its internal activations (\emph{Activation Consistency Training} (ACT), a method we introduce). Both methods reduce Gemini 2.5 Flash's susceptibility to irrelevant cues. Because consistency training uses responses from the model itself as training data, it avoids issues that arise from stale training data, such as degrading model capabilities or enforcing outdated response guidelines. While BCT and ACT reduce sycophancy equally well, BCT does better at jailbreak reduction. We think that BCT can simplify training pipelines by removing reliance on static datasets. We argue that some alignment problems are better viewed not in terms of optimal responses, but rather as consistency issues.
An Approach to Technical AGI Safety and Security
Apr 02, 2025Artificial General Intelligence (AGI) promises transformative benefits but also presents significant risks. We develop an approach to address the risk of harms consequential enough to significantly harm humanity. We identify four areas of risk: misuse, misalignment, mistakes, and structural risks. Of these, we focus on technical approaches to misuse and misalignment. For misuse, our strategy aims to prevent threat actors from accessing dangerous capabilities, by proactively identifying dangerous capabilities, and implementing robust security, access restrictions, monitoring, and model safety mitigations. To address misalignment, we outline two lines of defense. First, model-level mitigations such as amplified oversight and robust training can help to build an aligned model. Second, system-level security measures such as monitoring and access control can mitigate harm even if the model is misaligned. Techniques from interpretability, uncertainty estimation, and safer design patterns can enhance the effectiveness of these mitigations. Finally, we briefly outline how these ingredients could be combined to produce safety cases for AGI systems.
Generating Robot Constitutions & Benchmarks for Semantic Safety
Mar 11, 2025Until recently, robotics safety research was predominantly about collision avoidance and hazard reduction in the immediate vicinity of a robot. Since the advent of large vision and language models (VLMs), robots are now also capable of higher-level semantic scene understanding and natural language interactions with humans. Despite their known vulnerabilities (e.g. hallucinations or jail-breaking), VLMs are being handed control of robots capable of physical contact with the real world. This can lead to dangerous behaviors, making semantic safety for robots a matter of immediate concern. Our contributions in this paper are two fold: first, to address these emerging risks, we release the ASIMOV Benchmark, a large-scale and comprehensive collection of datasets for evaluating and improving semantic safety of foundation models serving as robot brains. Our data generation recipe is highly scalable: by leveraging text and image generation techniques, we generate undesirable situations from real-world visual scenes and human injury reports from hospitals. Secondly, we develop a framework to automatically generate robot constitutions from real-world data to steer a robot's behavior using Constitutional AI mechanisms. We propose a novel auto-amending process that is able to introduce nuances in written rules of behavior; this can lead to increased alignment with human preferences on behavior desirability and safety. We explore trade-offs between generality and specificity across a diverse set of constitutions of different lengths, and demonstrate that a robot is able to effectively reject unconstitutional actions. We measure a top alignment rate of 84.3% on the ASIMOV Benchmark using generated constitutions, outperforming no-constitution baselines and human-written constitutions. Data is available at asimov-benchmark.github.io
STEER: Flexible Robotic Manipulation via Dense Language Grounding
Nov 05, 2024



The complexity of the real world demands robotic systems that can intelligently adapt to unseen situations. We present STEER, a robot learning framework that bridges high-level, commonsense reasoning with precise, flexible low-level control. Our approach translates complex situational awareness into actionable low-level behavior through training language-grounded policies with dense annotation. By structuring policy training around fundamental, modular manipulation skills expressed in natural language, STEER exposes an expressive interface for humans or Vision-Language Models (VLMs) to intelligently orchestrate the robot's behavior by reasoning about the task and context. Our experiments demonstrate the skills learned via STEER can be combined to synthesize novel behaviors to adapt to new situations or perform completely new tasks without additional data collection or training.
Stop Regressing: Training Value Functions via Classification for Scalable Deep RL
Mar 06, 2024



Value functions are a central component of deep reinforcement learning (RL). These functions, parameterized by neural networks, are trained using a mean squared error regression objective to match bootstrapped target values. However, scaling value-based RL methods that use regression to large networks, such as high-capacity Transformers, has proven challenging. This difficulty is in stark contrast to supervised learning: by leveraging a cross-entropy classification loss, supervised methods have scaled reliably to massive networks. Observing this discrepancy, in this paper, we investigate whether the scalability of deep RL can also be improved simply by using classification in place of regression for training value functions. We demonstrate that value functions trained with categorical cross-entropy significantly improves performance and scalability in a variety of domains. These include: single-task RL on Atari 2600 games with SoftMoEs, multi-task RL on Atari with large-scale ResNets, robotic manipulation with Q-transformers, playing Chess without search, and a language-agent Wordle task with high-capacity Transformers, achieving state-of-the-art results on these domains. Through careful analysis, we show that the benefits of categorical cross-entropy primarily stem from its ability to mitigate issues inherent to value-based RL, such as noisy targets and non-stationarity. Overall, we argue that a simple shift to training value functions with categorical cross-entropy can yield substantial improvements in the scalability of deep RL at little-to-no cost.
AutoRT: Embodied Foundation Models for Large Scale Orchestration of Robotic Agents
Jan 23, 2024Foundation models that incorporate language, vision, and more recently actions have revolutionized the ability to harness internet scale data to reason about useful tasks. However, one of the key challenges of training embodied foundation models is the lack of data grounded in the physical world. In this paper, we propose AutoRT, a system that leverages existing foundation models to scale up the deployment of operational robots in completely unseen scenarios with minimal human supervision. AutoRT leverages vision-language models (VLMs) for scene understanding and grounding, and further uses large language models (LLMs) for proposing diverse and novel instructions to be performed by a fleet of robots. Guiding data collection by tapping into the knowledge of foundation models enables AutoRT to effectively reason about autonomy tradeoffs and safety while significantly scaling up data collection for robot learning. We demonstrate AutoRT proposing instructions to over 20 robots across multiple buildings and collecting 77k real robot episodes via both teleoperation and autonomous robot policies. We experimentally show that such "in-the-wild" data collected by AutoRT is significantly more diverse, and that AutoRT's use of LLMs allows for instruction following data collection robots that can align to human preferences.
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Oct 17, 2023



Large, high-capacity models trained on diverse datasets have shown remarkable successes on efficiently tackling downstream applications. In domains from NLP to Computer Vision, this has led to a consolidation of pretrained models, with general pretrained backbones serving as a starting point for many applications. Can such a consolidation happen in robotics? Conventionally, robotic learning methods train a separate model for every application, every robot, and even every environment. Can we instead train generalist X-robot policy that can be adapted efficiently to new robots, tasks, and environments? In this paper, we provide datasets in standardized data formats and models to make it possible to explore this possibility in the context of robotic manipulation, alongside experimental results that provide an example of effective X-robot policies. We assemble a dataset from 22 different robots collected through a collaboration between 21 institutions, demonstrating 527 skills (160266 tasks). We show that a high-capacity model trained on this data, which we call RT-X, exhibits positive transfer and improves the capabilities of multiple robots by leveraging experience from other platforms. More details can be found on the project website $\href{https://robotics-transformer-x.github.io}{\text{robotics-transformer-x.github.io}}$.
Q-Transformer: Scalable Offline Reinforcement Learning via Autoregressive Q-Functions
Sep 18, 2023



In this work, we present a scalable reinforcement learning method for training multi-task policies from large offline datasets that can leverage both human demonstrations and autonomously collected data. Our method uses a Transformer to provide a scalable representation for Q-functions trained via offline temporal difference backups. We therefore refer to the method as Q-Transformer. By discretizing each action dimension and representing the Q-value of each action dimension as separate tokens, we can apply effective high-capacity sequence modeling techniques for Q-learning. We present several design decisions that enable good performance with offline RL training, and show that Q-Transformer outperforms prior offline RL algorithms and imitation learning techniques on a large diverse real-world robotic manipulation task suite. The project's website and videos can be found at https://q-transformer.github.io
RT-2: Vision-Language-Action Models Transfer Web Knowledge to Robotic Control
Jul 28, 2023We study how vision-language models trained on Internet-scale data can be incorporated directly into end-to-end robotic control to boost generalization and enable emergent semantic reasoning. Our goal is to enable a single end-to-end trained model to both learn to map robot observations to actions and enjoy the benefits of large-scale pretraining on language and vision-language data from the web. To this end, we propose to co-fine-tune state-of-the-art vision-language models on both robotic trajectory data and Internet-scale vision-language tasks, such as visual question answering. In contrast to other approaches, we propose a simple, general recipe to achieve this goal: in order to fit both natural language responses and robotic actions into the same format, we express the actions as text tokens and incorporate them directly into the training set of the model in the same way as natural language tokens. We refer to such category of models as vision-language-action models (VLA) and instantiate an example of such a model, which we call RT-2. Our extensive evaluation (6k evaluation trials) shows that our approach leads to performant robotic policies and enables RT-2 to obtain a range of emergent capabilities from Internet-scale training. This includes significantly improved generalization to novel objects, the ability to interpret commands not present in the robot training data (such as placing an object onto a particular number or icon), and the ability to perform rudimentary reasoning in response to user commands (such as picking up the smallest or largest object, or the one closest to another object). We further show that incorporating chain of thought reasoning allows RT-2 to perform multi-stage semantic reasoning, for example figuring out which object to pick up for use as an improvised hammer (a rock), or which type of drink is best suited for someone who is tired (an energy drink).
RT-1: Robotics Transformer for Real-World Control at Scale
Dec 13, 2022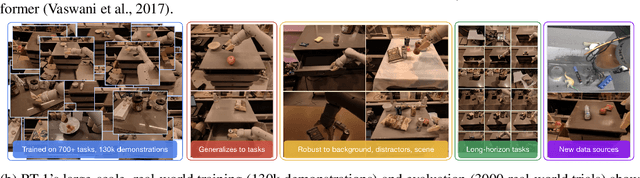
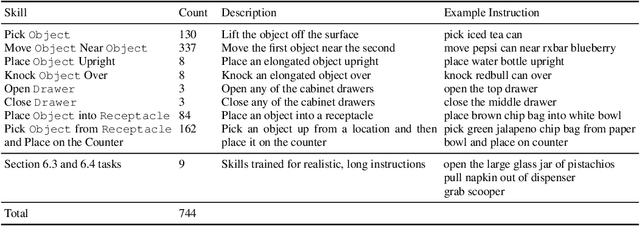
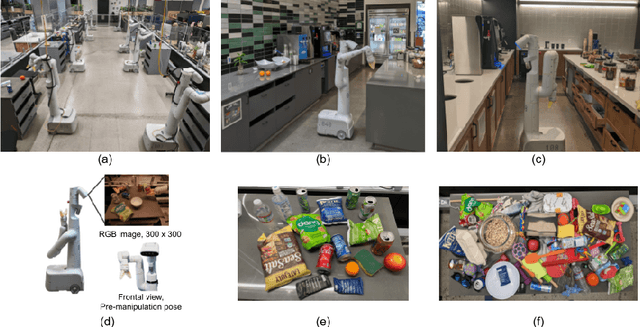
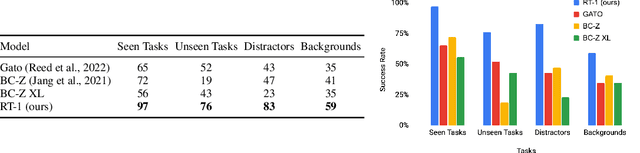
By transferring knowledge from large, diverse, task-agnostic datasets, modern machine learning models can solve specific downstream tasks either zero-shot or with small task-specific datasets to a high level of performance. While this capability has been demonstrated in other fields such as computer vision, natural language processing or speech recognition, it remains to be shown in robotics, where the generalization capabilities of the models are particularly critical due to the difficulty of collecting real-world robotic data. We argue that one of the keys to the success of such general robotic models lies with open-ended task-agnostic training, combined with high-capacity architectures that can absorb all of the diverse, robotic data. In this paper, we present a model class, dubbed Robotics Transformer, that exhibits promising scalable model properties. We verify our conclusions in a study of different model classes and their ability to generalize as a function of the data size, model size, and data diversity based on a large-scale data collection on real robots performing real-world tasks. The project's website and videos can be found at robotics-transformer.github.io