 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Comedy of Estimators: On KL Regularization in RL Training of LLMs
Dec 26, 2025The reasoning performance of large language models (LLMs) can be substantially improved by training them with reinforcement learning (RL). The RL objective for LLM training involves a regularization term, which is the reverse Kullback-Leibler (KL) divergence between the trained policy and the reference policy. Since computing the KL divergence exactly is intractable, various estimators are used in practice to estimate it from on-policy samples. Despite its wide adoption, including in several open-source libraries, there is no systematic study analyzing the numerous ways of incorporating KL estimators in the objective and their effect on the downstream performance of RL-trained models. Recent works show that prevailing practices for incorporating KL regularization do not provide correct gradients for stated objectives, creating a discrepancy between the objective and its implementation. In this paper, we further analyze these practices and study the gradients of several estimators configurations, revealing how design choices shape gradient bias. We substantiate these findings with empirical observations by RL fine-tuning \texttt{Qwen2.5-7B}, \texttt{Llama-3.1-8B-Instruct} and \texttt{Qwen3-4B-Instruct-2507} with different configurations and evaluating their performance on both in- and out-of-distribution tasks. Through our analysis, we observe that, in on-policy settings: (1) estimator configurations with biased gradients can result in training instabilities; and (2) using estimator configurations resulting in unbiased gradients leads to better performance on in-domain as well as out-of-domain tasks. We also investigate the performance resulting from different KL configurations in off-policy settings and observe that KL regularization can help stabilize off-policy RL training resulting from asynchronous setups.
ARM-FM: Automated Reward Machines via Foundation Models for Compositional Reinforcement Learning
Oct 16, 2025Reinforcement learning (RL) algorithms are highly sensitive to reward function specification, which remains a central challenge limiting their broad applicability. We present ARM-FM: Automated Reward Machines via Foundation Models, a framework for automated, compositional reward design in RL that leverages the high-level reasoning capabilities of foundation models (FMs). Reward machines (RMs) -- an automata-based formalism for reward specification -- are used as the mechanism for RL objective specification, and are automatically constructed via the use of FMs. The structured formalism of RMs yields effective task decompositions, while the use of FMs enables objective specifications in natural language. Concretely, we (i) use FMs to automatically generate RMs from natural language specifications; (ii) associate language embeddings with each RM automata-state to enable generalization across tasks; and (iii) provide empirical evidence of ARM-FM's effectiveness in a diverse suite of challenging environments, including evidence of zero-shot generalization.
Asymmetric Proximal Policy Optimization: mini-critics boost LLM reasoning
Oct 02, 2025Most recent RL for LLMs (RL4LLM) methods avoid explicit critics, replacing them with average advantage baselines. This shift is largely pragmatic: conventional value functions are computationally expensive to train at LLM scale and often fail under sparse rewards and long reasoning horizons. We revisit this bottleneck from an architectural perspective and introduce Asymmetric Proximal Policy Optimization (AsyPPO), a simple and scalable framework that restores the critics role while remaining efficient in large-model settings. AsyPPO employs a set of lightweight mini-critics, each trained on disjoint prompt shards. This design encourages diversity while preserving calibration, reducing value-estimation bias. Beyond robust estimation, AsyPPO leverages inter-critic uncertainty to refine the policy update: (i) masking advantages in states where critics agree and gradients add little learning signal, and (ii) filtering high-divergence states from entropy regularization, suppressing spurious exploration. After training on open-source data with only 5,000 samples, AsyPPO consistently improves learning stability and performance across multiple benchmarks over strong baselines, such as GRPO, achieving performance gains of more than six percent on Qwen3-4b-Base and about three percent on Qwen3-8b-Base and Qwen3-14b-Base over classic PPO, without additional tricks. These results highlight the importance of architectural innovations for scalable, efficient algorithms.
Stable Gradients for Stable Learning at Scale in Deep Reinforcement Learning
Jun 18, 2025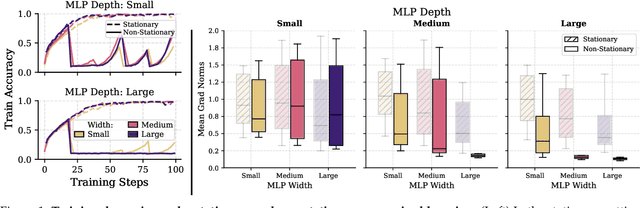
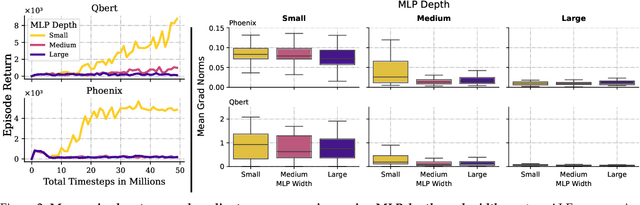
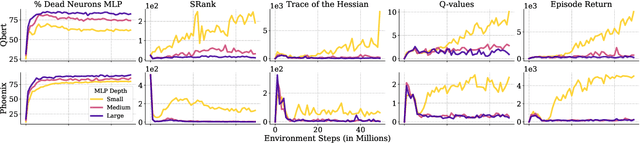
Scaling deep reinforcement learning networks is challenging and often results in degraded performance, yet the root causes of this failure mode remain poorly understood. Several recent works have proposed mechanisms to address this, but they are often complex and fail to highlight the causes underlying this difficulty. In this work, we conduct a series of empirical analyses which suggest that the combination of non-stationarity with gradient pathologies, due to suboptimal architectural choices, underlie the challenges of scale. We propose a series of direct interventions that stabilize gradient flow, enabling robust performance across a range of network depths and widths. Our interventions are simple to implement and compatible with well-established algorithms, and result in an effective mechanism that enables strong performance even at large scales. We validate our findings on a variety of agents and suites of environments.
Adaptive Accompaniment with ReaLchords
Jun 17, 2025Jamming requires coordination, anticipation, and collaborative creativity between musicians. Current generative models of music produce expressive output but are not able to generate in an \emph{online} manner, meaning simultaneously with other musicians (human or otherwise). We propose ReaLchords, an online generative model for improvising chord accompaniment to user melody. We start with an online model pretrained by maximum likelihood, and use reinforcement learning to finetune the model for online use. The finetuning objective leverages both a novel reward model that provides feedback on both harmonic and temporal coherency between melody and chord, and a divergence term that implements a novel type of distillation from a teacher model that can see the future melody. Through quantitative experiments and listening tests, we demonstrate that the resulting model adapts well to unfamiliar input and produce fitting accompaniment. ReaLchords opens the door to live jamming, as well as simultaneous co-creation in other modalities.
The Courage to Stop: Overcoming Sunk Cost Fallacy in Deep Reinforcement Learning
Jun 16, 2025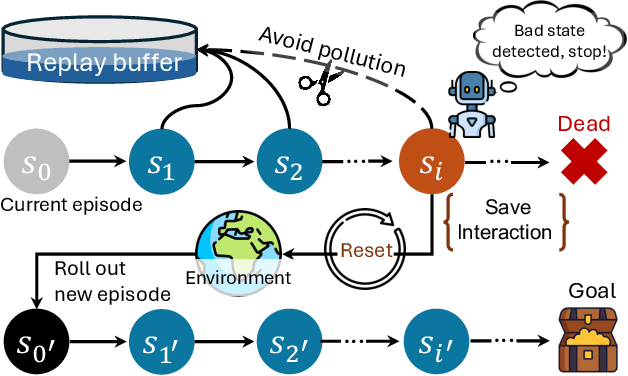
Off-policy deep reinforcement learning (RL) typically leverages replay buffers for reusing past experiences during learning. This can help improve sample efficiency when the collected data is informative and aligned with the learning objectives; when that is not the case, it can have the effect of "polluting" the replay buffer with data which can exacerbate optimization challenges in addition to wasting environment interactions due to wasteful sampling. We argue that sampling these uninformative and wasteful transitions can be avoided by addressing the sunk cost fallacy, which, in the context of deep RL, is the tendency towards continuing an episode until termination. To address this, we propose learn to stop (LEAST), a lightweight mechanism that enables strategic early episode termination based on Q-value and gradient statistics, which helps agents recognize when to terminate unproductive episodes early. We demonstrate that our method improves learning efficiency on a variety of RL algorithms, evaluated on both the MuJoCo and DeepMind Control Suite benchmarks.
Measure gradients, not activations! Enhancing neuronal activity in deep reinforcement learning
May 29, 2025Deep reinforcement learning (RL) agents frequently suffer from neuronal activity loss, which impairs their ability to adapt to new data and learn continually. A common method to quantify and address this issue is the tau-dormant neuron ratio, which uses activation statistics to measure the expressive ability of neurons. While effective for simple MLP-based agents, this approach loses statistical power in more complex architectures. To address this, we argue that in advanced RL agents, maintaining a neuron's learning capacity, its ability to adapt via gradient updates, is more critical than preserving its expressive ability. Based on this insight, we shift the statistical objective from activations to gradients, and introduce GraMa (Gradient Magnitude Neural Activity Metric), a lightweight, architecture-agnostic metric for quantifying neuron-level learning capacity. We show that GraMa effectively reveals persistent neuron inactivity across diverse architectures, including residual networks, diffusion models, and agents with varied activation functions. Moreover, resetting neurons guided by GraMa (ReGraMa) consistently improves learning performance across multiple deep RL algorithms and benchmarks, such as MuJoCo and the DeepMind Control Suite.
Mind the GAP! The Challenges of Scale in Pixel-based Deep Reinforcement Learning
May 23, 2025Scaling deep reinforcement learning in pixel-based environments presents a significant challenge, often resulting in diminished performance. While recent works have proposed algorithmic and architectural approaches to address this, the underlying cause of the performance drop remains unclear. In this paper, we identify the connection between the output of the encoder (a stack of convolutional layers) and the ensuing dense layers as the main underlying factor limiting scaling capabilities; we denote this connection as the bottleneck, and we demonstrate that previous approaches implicitly target this bottleneck. As a result of our analyses, we present global average pooling as a simple yet effective way of targeting the bottleneck, thereby avoiding the complexity of earlier approaches.
Meta-World+: An Improved, Standardized, RL Benchmark
May 16, 2025Meta-World is widely used for evaluating multi-task and meta-reinforcement learning agents, which are challenged to master diverse skills simultaneously. Since its introduction however, there have been numerous undocumented changes which inhibit a fair comparison of algorithms. This work strives to disambiguate these results from the literature, while also leveraging the past versions of Meta-World to provide insights into multi-task and meta-reinforcement learning benchmark design. Through this process we release a new open-source version of Meta-World (https://github.com/Farama-Foundation/Metaworld/) that has full reproducibility of past results, is more technically ergonomic, and gives users more control over the tasks that are included in a task set.
Studying the Interplay Between the Actor and Critic Representations in Reinforcement Learning
Mar 08, 2025
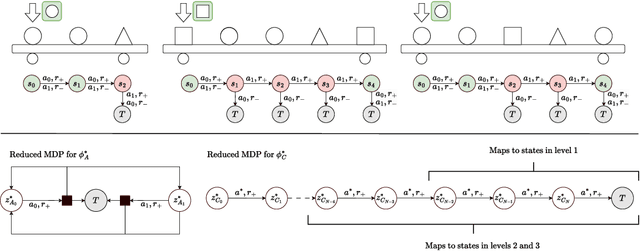

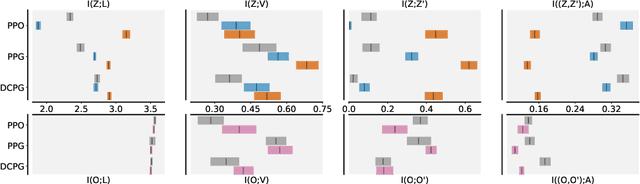
Extracting relevant information from a stream of high-dimensional observations is a central challenge for deep reinforcement learning agents. Actor-critic algorithms add further complexity to this challenge, as it is often unclear whether the same information will be relevant to both the actor and the critic. To this end, we here explore the principles that underlie effective representations for the actor and for the critic in on-policy algorithms. We focus our study on understanding whether the actor and critic will benefit from separate, rather than shared, representations. Our primary finding is that when separated, the representations for the actor and critic systematically specialise in extracting different types of information from the environment -- the actor's representation tends to focus on action-relevant information, while the critic's representation specialises in encoding value and dynamics information. We conduct a rigourous empirical study to understand how different representation learning approaches affect the actor and critic's specialisations and their downstream performance, in terms of sample efficiency and generation capabilities. Finally, we discover that a separated critic plays an important role in exploration and data collection during training. Our code, trained models and data are accessible at https://github.com/francelico/deac-rep.