 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAffordances Enable Partial World Modeling with LLMs
Feb 11, 2026Full models of the world require complex knowledge of immense detail. While pre-trained large models have been hypothesized to contain similar knowledge due to extensive pre-training on vast amounts of internet scale data, using them directly in a search procedure is inefficient and inaccurate. Conversely, partial models focus on making high quality predictions for a subset of state and actions: those linked through affordances that achieve user intents~\citep{khetarpal2020can}. Can we posit large models as partial world models? We provide a formal answer to this question, proving that agents achieving task-agnostic, language-conditioned intents necessarily possess predictive partial-world models informed by affordances. In the multi-task setting, we introduce distribution-robust affordances and show that partial models can be extracted to significantly improve search efficiency. Empirical evaluations in tabletop robotics tasks demonstrate that our affordance-aware partial models reduce the search branching factor and achieve higher rewards compared to full world models.
A2Perf: Real-World Autonomous Agents Benchmark
Mar 04, 2025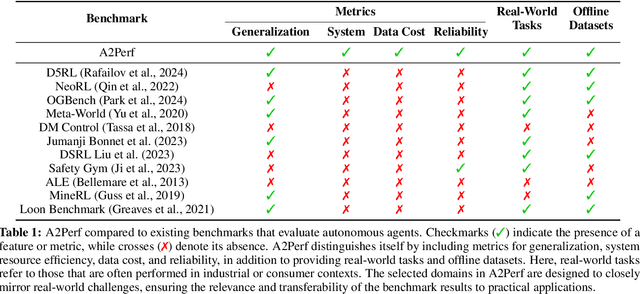
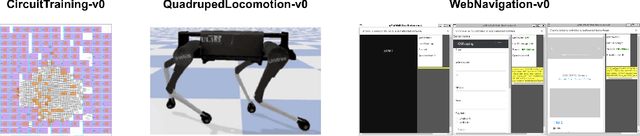
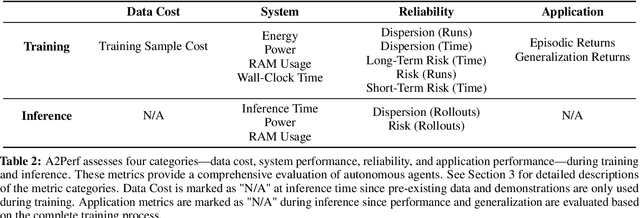
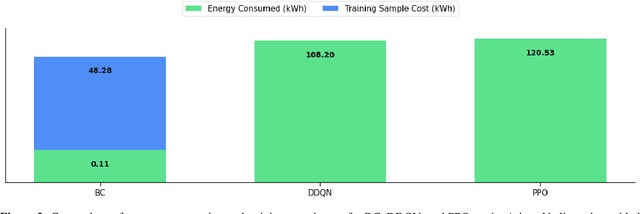
Autonomous agents and systems cover a number of application areas, from robotics and digital assistants to combinatorial optimization, all sharing common, unresolved research challenges. It is not sufficient for agents to merely solve a given task; they must generalize to out-of-distribution tasks, perform reliably, and use hardware resources efficiently during training and inference, among other requirements. Several methods, such as reinforcement learning and imitation learning, are commonly used to tackle these problems, each with different trade-offs. However, there is a lack of benchmarking suites that define the environments, datasets, and metrics which can be used to provide a meaningful way for the community to compare progress on applying these methods to real-world problems. We introduce A2Perf--a benchmark with three environments that closely resemble real-world domains: computer chip floorplanning, web navigation, and quadruped locomotion. A2Perf provides metrics that track task performance, generalization, system resource efficiency, and reliability, which are all critical to real-world applications. Using A2Perf, we demonstrate that web navigation agents can achieve latencies comparable to human reaction times on consumer hardware, reveal reliability trade-offs between algorithms for quadruped locomotion, and quantify the energy costs of different learning approaches for computer chip-design. In addition, we propose a data cost metric to account for the cost incurred acquiring offline data for imitation learning and hybrid algorithms, which allows us to better compare these approaches. A2Perf also contains several standard baselines, enabling apples-to-apples comparisons across methods and facilitating progress in real-world autonomy. As an open-source benchmark, A2Perf is designed to remain accessible, up-to-date, and useful to the research community over the long term.
Inference-Aware Fine-Tuning for Best-of-N Sampling in Large Language Models
Dec 18, 2024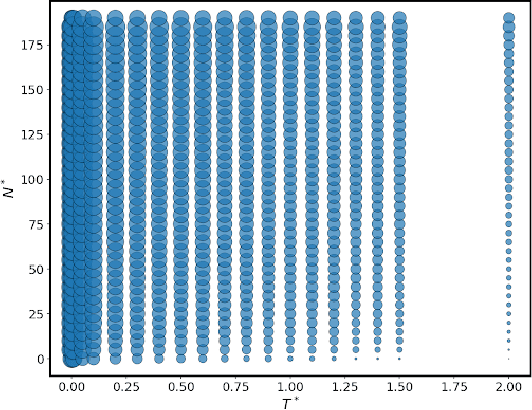
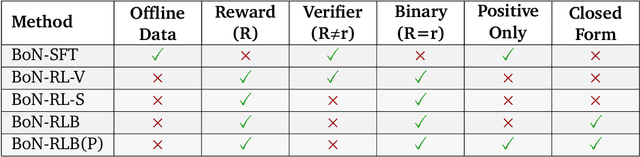
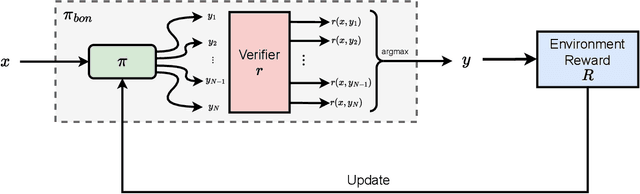
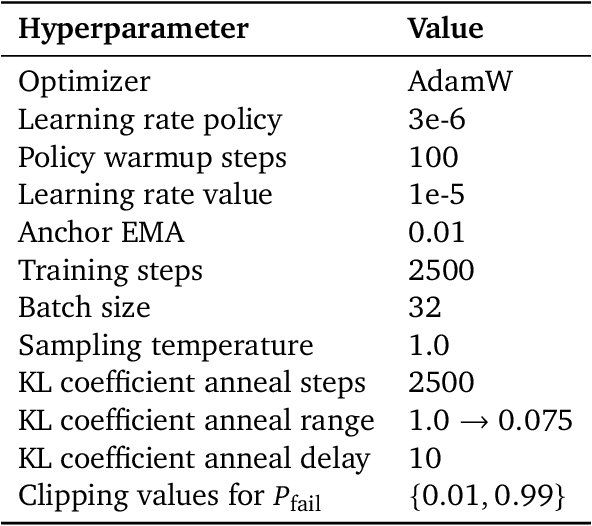
Recent studies have indicated that effectively utilizing inference-time compute is crucial for attaining better performance from large language models (LLMs). In this work, we propose a novel inference-aware fine-tuning paradigm, in which the model is fine-tuned in a manner that directly optimizes the performance of the inference-time strategy. We study this paradigm using the simple yet effective Best-of-N (BoN) inference strategy, in which a verifier selects the best out of a set of LLM-generated responses. We devise the first imitation learning and reinforcement learning~(RL) methods for BoN-aware fine-tuning, overcoming the challenging, non-differentiable argmax operator within BoN. We empirically demonstrate that our BoN-aware models implicitly learn a meta-strategy that interleaves best responses with more diverse responses that might be better suited to a test-time input -- a process reminiscent of the exploration-exploitation trade-off in RL. Our experiments demonstrate the effectiveness of BoN-aware fine-tuning in terms of improved performance and inference-time compute. In particular, we show that our methods improve the Bo32 performance of Gemma 2B on Hendrycks MATH from 26.8% to 30.8%, and pass@32 from 60.0% to 67.0%, as well as the pass@16 on HumanEval from 61.6% to 67.1%.
Improving Dynamic Object Interactions in Text-to-Video Generation with AI Feedback
Dec 03, 2024

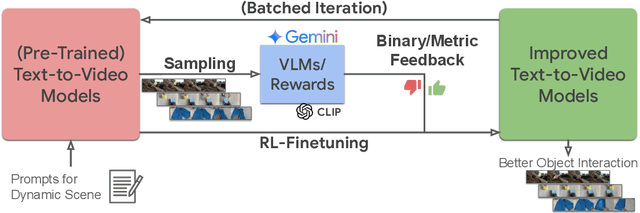

Large text-to-video models hold immense potential for a wide range of downstream applications. However, these models struggle to accurately depict dynamic object interactions, often resulting in unrealistic movements and frequent violations of real-world physics. One solution inspired by large language models is to align generated outputs with desired outcomes using external feedback. This enables the model to refine its responses autonomously, eliminating extensive manual data collection. In this work, we investigate the use of feedback to enhance the object dynamics in text-to-video models. We aim to answer a critical question: what types of feedback, paired with which specific self-improvement algorithms, can most effectively improve text-video alignment and realistic object interactions? We begin by deriving a unified probabilistic objective for offline RL finetuning of text-to-video models. This perspective highlights how design elements in existing algorithms like KL regularization and policy projection emerge as specific choices within a unified framework. We then use derived methods to optimize a set of text-video alignment metrics (e.g., CLIP scores, optical flow), but notice that they often fail to align with human perceptions of generation quality. To address this limitation, we propose leveraging vision-language models to provide more nuanced feedback specifically tailored to object dynamics in videos. Our experiments demonstrate that our method can effectively optimize a wide variety of rewards, with binary AI feedback driving the most significant improvements in video quality for dynamic interactions, as confirmed by both AI and human evaluations. Notably, we observe substantial gains when using reward signals derived from AI feedback, particularly in scenarios involving complex interactions between multiple objects and realistic depictions of objects falling.
ElasticTok: Adaptive Tokenization for Image and Video
Oct 10, 2024



Efficient video tokenization remains a key bottleneck in learning general purpose vision models that are capable of processing long video sequences. Prevailing approaches are restricted to encoding videos to a fixed number of tokens, where too few tokens will result in overly lossy encodings, and too many tokens will result in prohibitively long sequence lengths. In this work, we introduce ElasticTok, a method that conditions on prior frames to adaptively encode a frame into a variable number of tokens. To enable this in a computationally scalable way, we propose a masking technique that drops a random number of tokens at the end of each frames's token encoding. During inference, ElasticTok can dynamically allocate tokens when needed -- more complex data can leverage more tokens, while simpler data only needs a few tokens. Our empirical evaluations on images and video demonstrate the effectiveness of our approach in efficient token usage, paving the way for future development of more powerful multimodal models, world models, and agents.
Geometric-Averaged Preference Optimization for Soft Preference Labels
Sep 10, 2024Many algorithms for aligning LLMs with human preferences assume that human preferences are binary and deterministic. However, it is reasonable to think that they can vary with different individuals, and thus should be distributional to reflect the fine-grained relationship between the responses. In this work, we introduce the distributional soft preference labels and improve Direct Preference Optimization (DPO) with a weighted geometric average of the LLM output likelihood in the loss function. In doing so, the scale of learning loss is adjusted based on the soft labels, and the loss with equally preferred responses would be close to zero. This simple modification can be easily applied to any DPO family and helps the models escape from the over-optimization and objective mismatch prior works suffer from. In our experiments, we simulate the soft preference labels with AI feedback from LLMs and demonstrate that geometric averaging consistently improves performance on standard benchmarks for alignment research. In particular, we observe more preferable responses than binary labels and significant improvements with data where modestly-confident labels are in the majority.
Many-Shot In-Context Learning
Apr 17, 2024



Large language models (LLMs) excel at few-shot in-context learning (ICL) -- learning from a few examples provided in context at inference, without any weight updates. Newly expanded context windows allow us to investigate ICL with hundreds or thousands of examples -- the many-shot regime. Going from few-shot to many-shot, we observe significant performance gains across a wide variety of generative and discriminative tasks. While promising, many-shot ICL can be bottlenecked by the available amount of human-generated examples. To mitigate this limitation, we explore two new settings: Reinforced and Unsupervised ICL. Reinforced ICL uses model-generated chain-of-thought rationales in place of human examples. Unsupervised ICL removes rationales from the prompt altogether, and prompts the model only with domain-specific questions. We find that both Reinforced and Unsupervised ICL can be quite effective in the many-shot regime, particularly on complex reasoning tasks. Finally, we demonstrate that, unlike few-shot learning, many-shot learning is effective at overriding pretraining biases and can learn high-dimensional functions with numerical inputs. Our analysis also reveals the limitations of next-token prediction loss as an indicator of downstream ICL performance.
Stop Regressing: Training Value Functions via Classification for Scalable Deep RL
Mar 06, 2024



Value functions are a central component of deep reinforcement learning (RL). These functions, parameterized by neural networks, are trained using a mean squared error regression objective to match bootstrapped target values. However, scaling value-based RL methods that use regression to large networks, such as high-capacity Transformers, has proven challenging. This difficulty is in stark contrast to supervised learning: by leveraging a cross-entropy classification loss, supervised methods have scaled reliably to massive networks. Observing this discrepancy, in this paper, we investigate whether the scalability of deep RL can also be improved simply by using classification in place of regression for training value functions. We demonstrate that value functions trained with categorical cross-entropy significantly improves performance and scalability in a variety of domains. These include: single-task RL on Atari 2600 games with SoftMoEs, multi-task RL on Atari with large-scale ResNets, robotic manipulation with Q-transformers, playing Chess without search, and a language-agent Wordle task with high-capacity Transformers, achieving state-of-the-art results on these domains. Through careful analysis, we show that the benefits of categorical cross-entropy primarily stem from its ability to mitigate issues inherent to value-based RL, such as noisy targets and non-stationarity. Overall, we argue that a simple shift to training value functions with categorical cross-entropy can yield substantial improvements in the scalability of deep RL at little-to-no cost.
Guided Evolution with Binary Discriminators for ML Program Search
Feb 08, 2024How to automatically design better machine learning programs is an open problem within AutoML. While evolution has been a popular tool to search for better ML programs, using learning itself to guide the search has been less successful and less understood on harder problems but has the promise to dramatically increase the speed and final performance of the optimization process. We propose guiding evolution with a binary discriminator, trained online to distinguish which program is better given a pair of programs. The discriminator selects better programs without having to perform a costly evaluation and thus speed up the convergence of evolution. Our method can encode a wide variety of ML components including symbolic optimizers, neural architectures, RL loss functions, and symbolic regression equations with the same directed acyclic graph representation. By combining this representation with modern GNNs and an adaptive mutation strategy, we demonstrate our method can speed up evolution across a set of diverse problems including a 3.7x speedup on the symbolic search for ML optimizers and a 4x speedup for RL loss functions.
Language Model Agents Suffer from Compositional Generalization in Web Automation
Nov 30, 2023Language model agents (LMA) recently emerged as a promising paradigm on muti-step decision making tasks, often outperforming humans and other reinforcement learning agents. Despite the promise, their performance on real-world applications that often involve combinations of tasks is still underexplored. In this work, we introduce a new benchmark, called CompWoB -- 50 new compositional web automation tasks reflecting more realistic assumptions. We show that while existing prompted LMAs (gpt-3.5-turbo or gpt-4) achieve 94.0% average success rate on base tasks, their performance degrades to 24.9% success rate on compositional tasks. On the other hand, transferred LMAs (finetuned only on base tasks) show less generalization gap, dropping from 85.4% to 54.8%. By balancing data distribution across tasks, we train a new model, HTML-T5++, that surpasses human-level performance (95.2%) on MiniWoB, and achieves the best zero-shot performance on CompWoB (61.5%). While these highlight the promise of small-scale finetuned and transferred models for compositional generalization, their performance further degrades under different instruction compositions changing combinational order. In contrast to the recent remarkable success of LMA, our benchmark and detailed analysis emphasize the necessity of building LMAs that are robust and generalizable to task compositionality for real-world deployment.