 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTraining-free Diffusion Model Alignment with Sampling Demons
Oct 08, 2024Aligning diffusion models with user preferences has been a key challenge. Existing methods for aligning diffusion models either require retraining or are limited to differentiable reward functions. To address these limitations, we propose a stochastic optimization approach, dubbed Demon, to guide the denoising process at inference time without backpropagation through reward functions or model retraining. Our approach works by controlling noise distribution in denoising steps to concentrate density on regions corresponding to high rewards through stochastic optimization. We provide comprehensive theoretical and empirical evidence to support and validate our approach, including experiments that use non-differentiable sources of rewards such as Visual-Language Model (VLM) APIs and human judgements. To the best of our knowledge, the proposed approach is the first inference-time, backpropagation-free preference alignment method for diffusion models. Our method can be easily integrated with existing diffusion models without further training. Our experiments show that the proposed approach significantly improves the average aesthetics scores for text-to-image generation.
Geometric-Averaged Preference Optimization for Soft Preference Labels
Sep 10, 2024Many algorithms for aligning LLMs with human preferences assume that human preferences are binary and deterministic. However, it is reasonable to think that they can vary with different individuals, and thus should be distributional to reflect the fine-grained relationship between the responses. In this work, we introduce the distributional soft preference labels and improve Direct Preference Optimization (DPO) with a weighted geometric average of the LLM output likelihood in the loss function. In doing so, the scale of learning loss is adjusted based on the soft labels, and the loss with equally preferred responses would be close to zero. This simple modification can be easily applied to any DPO family and helps the models escape from the over-optimization and objective mismatch prior works suffer from. In our experiments, we simulate the soft preference labels with AI feedback from LLMs and demonstrate that geometric averaging consistently improves performance on standard benchmarks for alignment research. In particular, we observe more preferable responses than binary labels and significant improvements with data where modestly-confident labels are in the majority.
A Human-Inspired Reading Agent with Gist Memory of Very Long Contexts
Feb 23, 2024Current Large Language Models (LLMs) are not only limited to some maximum context length, but also are not able to robustly consume long inputs. To address these limitations, we propose ReadAgent, an LLM agent system that increases effective context length up to 20x in our experiments. Inspired by how humans interactively read long documents, we implement ReadAgent as a simple prompting system that uses the advanced language capabilities of LLMs to (1) decide what content to store together in a memory episode, (2) compress those memory episodes into short episodic memories called gist memories, and (3) take actions to look up passages in the original text if ReadAgent needs to remind itself of relevant details to complete a task. We evaluate ReadAgent against baselines using retrieval methods, using the original long contexts, and using the gist memories. These evaluations are performed on three long-document reading comprehension tasks: QuALITY, NarrativeQA, and QMSum. ReadAgent outperforms the baselines on all three tasks while extending the effective context window by 3-20x.
Learning to Learn Faster from Human Feedback with Language Model Predictive Control
Feb 18, 2024



Large language models (LLMs) have been shown to exhibit a wide range of capabilities, such as writing robot code from language commands -- enabling non-experts to direct robot behaviors, modify them based on feedback, or compose them to perform new tasks. However, these capabilities (driven by in-context learning) are limited to short-term interactions, where users' feedback remains relevant for only as long as it fits within the context size of the LLM, and can be forgotten over longer interactions. In this work, we investigate fine-tuning the robot code-writing LLMs, to remember their in-context interactions and improve their teachability i.e., how efficiently they adapt to human inputs (measured by average number of corrections before the user considers the task successful). Our key observation is that when human-robot interactions are formulated as a partially observable Markov decision process (in which human language inputs are observations, and robot code outputs are actions), then training an LLM to complete previous interactions can be viewed as training a transition dynamics model -- that can be combined with classic robotics techniques such as model predictive control (MPC) to discover shorter paths to success. This gives rise to Language Model Predictive Control (LMPC), a framework that fine-tunes PaLM 2 to improve its teachability on 78 tasks across 5 robot embodiments -- improving non-expert teaching success rates of unseen tasks by 26.9% while reducing the average number of human corrections from 2.4 to 1.9. Experiments show that LMPC also produces strong meta-learners, improving the success rate of in-context learning new tasks on unseen robot embodiments and APIs by 31.5%. See videos, code, and demos at: https://robot-teaching.github.io/.
PIVOT: Iterative Visual Prompting Elicits Actionable Knowledge for VLMs
Feb 12, 2024



Vision language models (VLMs) have shown impressive capabilities across a variety of tasks, from logical reasoning to visual understanding. This opens the door to richer interaction with the world, for example robotic control. However, VLMs produce only textual outputs, while robotic control and other spatial tasks require outputting continuous coordinates, actions, or trajectories. How can we enable VLMs to handle such settings without fine-tuning on task-specific data? In this paper, we propose a novel visual prompting approach for VLMs that we call Prompting with Iterative Visual Optimization (PIVOT), which casts tasks as iterative visual question answering. In each iteration, the image is annotated with a visual representation of proposals that the VLM can refer to (e.g., candidate robot actions, localizations, or trajectories). The VLM then selects the best ones for the task. These proposals are iteratively refined, allowing the VLM to eventually zero in on the best available answer. We investigate PIVOT on real-world robotic navigation, real-world manipulation from images, instruction following in simulation, and additional spatial inference tasks such as localization. We find, perhaps surprisingly, that our approach enables zero-shot control of robotic systems without any robot training data, navigation in a variety of environments, and other capabilities. Although current performance is far from perfect, our work highlights potentials and limitations of this new regime and shows a promising approach for Internet-Scale VLMs in robotic and spatial reasoning domains. Website: pivot-prompt.github.io and HuggingFace: https://huggingface.co/spaces/pivot-prompt/pivot-prompt-demo.
Language to Rewards for Robotic Skill Synthesis
Jun 16, 2023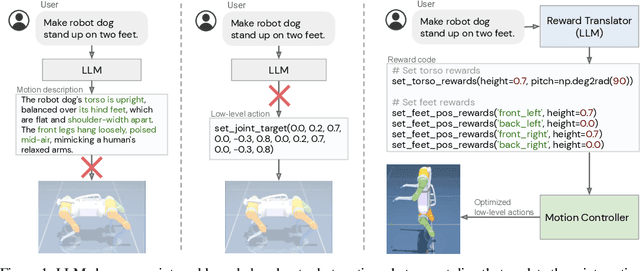
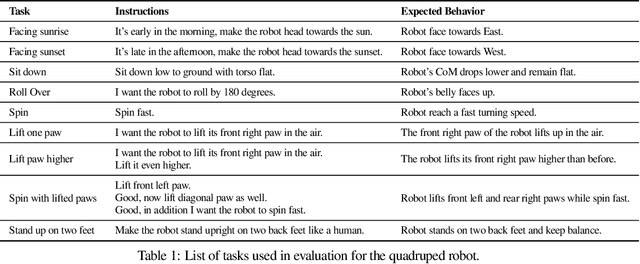
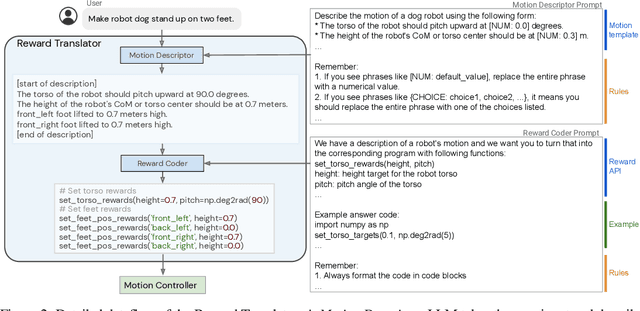
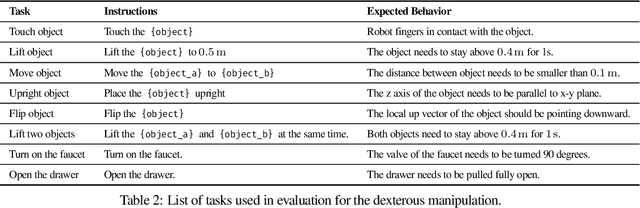
Large language models (LLMs) have demonstrated exciting progress in acquiring diverse new capabilities through in-context learning, ranging from logical reasoning to code-writing. Robotics researchers have also explored using LLMs to advance the capabilities of robotic control. However, since low-level robot actions are hardware-dependent and underrepresented in LLM training corpora, existing efforts in applying LLMs to robotics have largely treated LLMs as semantic planners or relied on human-engineered control primitives to interface with the robot. On the other hand, reward functions are shown to be flexible representations that can be optimized for control policies to achieve diverse tasks, while their semantic richness makes them suitable to be specified by LLMs. In this work, we introduce a new paradigm that harnesses this realization by utilizing LLMs to define reward parameters that can be optimized and accomplish variety of robotic tasks. Using reward as the intermediate interface generated by LLMs, we can effectively bridge the gap between high-level language instructions or corrections to low-level robot actions. Meanwhile, combining this with a real-time optimizer, MuJoCo MPC, empowers an interactive behavior creation experience where users can immediately observe the results and provide feedback to the system. To systematically evaluate the performance of our proposed method, we designed a total of 17 tasks for a simulated quadruped robot and a dexterous manipulator robot. We demonstrate that our proposed method reliably tackles 90% of the designed tasks, while a baseline using primitive skills as the interface with Code-as-policies achieves 50% of the tasks. We further validated our method on a real robot arm where complex manipulation skills such as non-prehensile pushing emerge through our interactive system.
Barkour: Benchmarking Animal-level Agility with Quadruped Robots
May 24, 2023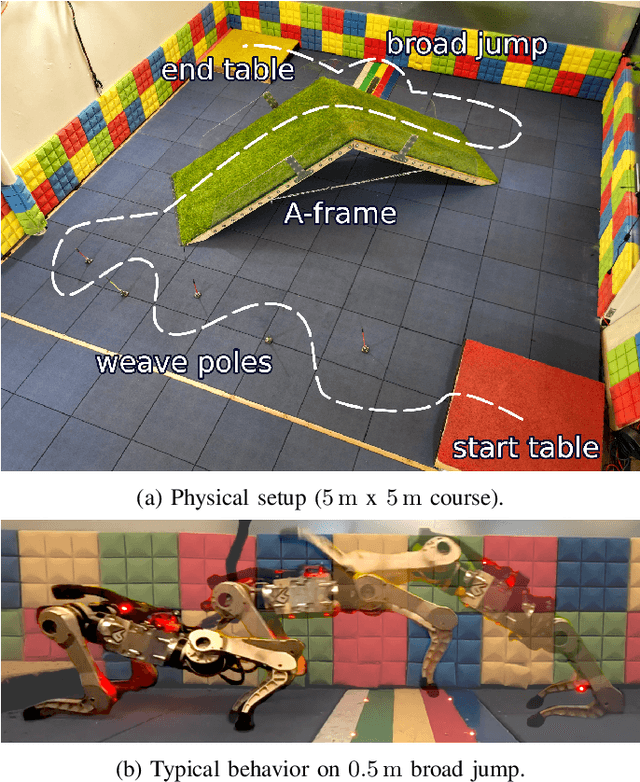
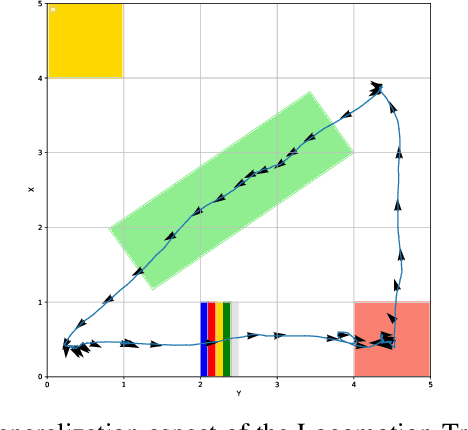
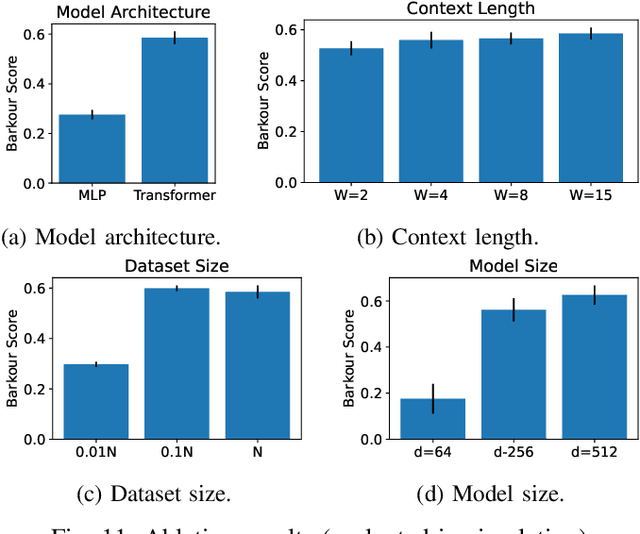
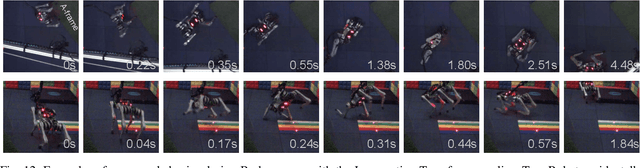
Animals have evolved various agile locomotion strategies, such as sprinting, leaping, and jumping. There is a growing interest in developing legged robots that move like their biological counterparts and show various agile skills to navigate complex environments quickly. Despite the interest, the field lacks systematic benchmarks to measure the performance of control policies and hardware in agility. We introduce the Barkour benchmark, an obstacle course to quantify agility for legged robots. Inspired by dog agility competitions, it consists of diverse obstacles and a time based scoring mechanism. This encourages researchers to develop controllers that not only move fast, but do so in a controllable and versatile way. To set strong baselines, we present two methods for tackling the benchmark. In the first approach, we train specialist locomotion skills using on-policy reinforcement learning methods and combine them with a high-level navigation controller. In the second approach, we distill the specialist skills into a Transformer-based generalist locomotion policy, named Locomotion-Transformer, that can handle various terrains and adjust the robot's gait based on the perceived environment and robot states. Using a custom-built quadruped robot, we demonstrate that our method can complete the course at half the speed of a dog. We hope that our work represents a step towards creating controllers that enable robots to reach animal-level agility.
Multimodal Web Navigation with Instruction-Finetuned Foundation Models
May 19, 2023The progress of autonomous web navigation has been hindered by the dependence on billions of exploratory interactions via online reinforcement learning, and domain-specific model designs that make it difficult to leverage generalization from rich out-of-domain data. In this work, we study data-driven offline training for web agents with vision-language foundation models. We propose an instruction-following multimodal agent, WebGUM, that observes both webpage screenshots and HTML pages and outputs web navigation actions, such as click and type. WebGUM is trained by jointly finetuning an instruction-finetuned language model and a vision transformer on a large corpus of demonstrations. We empirically demonstrate this recipe improves the agent's ability of grounded visual perception, HTML comprehension and multi-step reasoning, outperforming prior works by a significant margin. On the MiniWoB benchmark, we improve over the previous best offline methods by more than 31.9%, being close to reaching online-finetuned SoTA. On the WebShop benchmark, our 3-billion-parameter model achieves superior performance to the existing SoTA, PaLM-540B. We also collect 347K high-quality demonstrations using our trained models, 38 times larger than prior work, and make them available to promote future research in this direction.
Deep RL at Scale: Sorting Waste in Office Buildings with a Fleet of Mobile Manipulators
May 05, 2023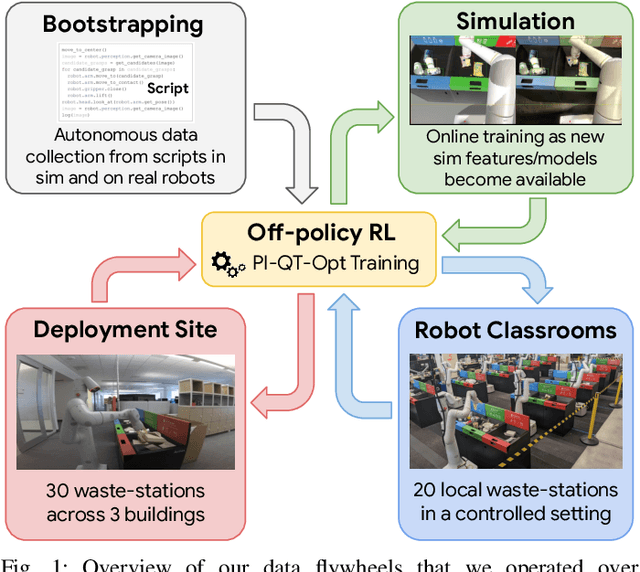
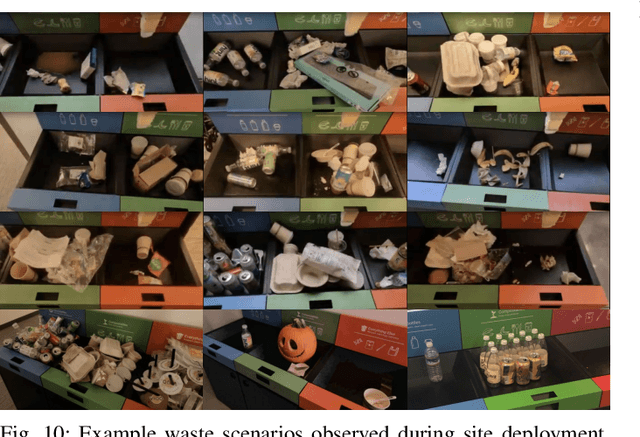
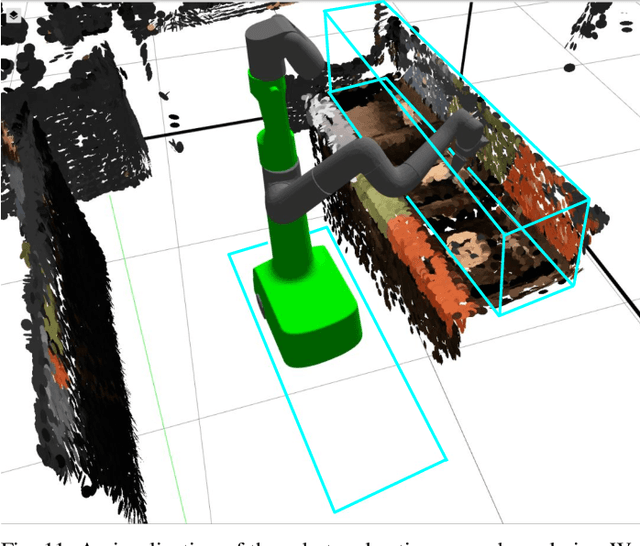
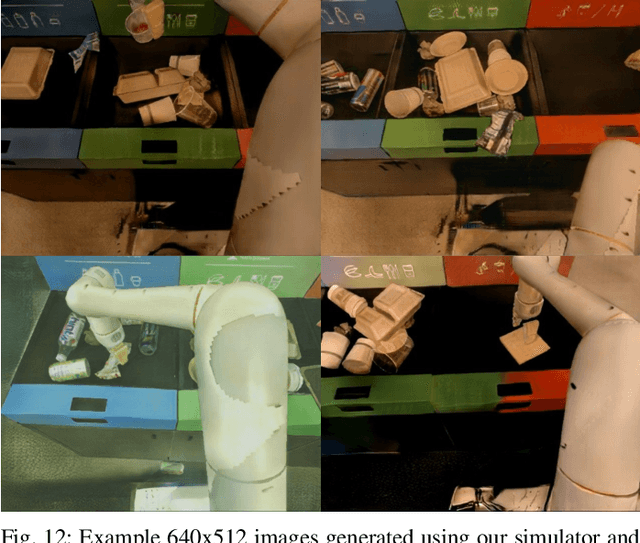
We describe a system for deep reinforcement learning of robotic manipulation skills applied to a large-scale real-world task: sorting recyclables and trash in office buildings. Real-world deployment of deep RL policies requires not only effective training algorithms, but the ability to bootstrap real-world training and enable broad generalization. To this end, our system combines scalable deep RL from real-world data with bootstrapping from training in simulation, and incorporates auxiliary inputs from existing computer vision systems as a way to boost generalization to novel objects, while retaining the benefits of end-to-end training. We analyze the tradeoffs of different design decisions in our system, and present a large-scale empirical validation that includes training on real-world data gathered over the course of 24 months of experimentation, across a fleet of 23 robots in three office buildings, with a total training set of 9527 hours of robotic experience. Our final validation also consists of 4800 evaluation trials across 240 waste station configurations, in order to evaluate in detail the impact of the design decisions in our system, the scaling effects of including more real-world data, and the performance of the method on novel objects. The projects website and videos can be found at \href{http://rl-at-scale.github.io}{rl-at-scale.github.io}.
Open-World Object Manipulation using Pre-trained Vision-Language Models
Mar 02, 2023



For robots to follow instructions from people, they must be able to connect the rich semantic information in human vocabulary, e.g. "can you get me the pink stuffed whale?" to their sensory observations and actions. This brings up a notably difficult challenge for robots: while robot learning approaches allow robots to learn many different behaviors from first-hand experience, it is impractical for robots to have first-hand experiences that span all of this semantic information. We would like a robot's policy to be able to perceive and pick up the pink stuffed whale, even if it has never seen any data interacting with a stuffed whale before. Fortunately, static data on the internet has vast semantic information, and this information is captured in pre-trained vision-language models. In this paper, we study whether we can interface robot policies with these pre-trained models, with the aim of allowing robots to complete instructions involving object categories that the robot has never seen first-hand. We develop a simple approach, which we call Manipulation of Open-World Objects (MOO), which leverages a pre-trained vision-language model to extract object-identifying information from the language command and image, and conditions the robot policy on the current image, the instruction, and the extracted object information. In a variety of experiments on a real mobile manipulator, we find that MOO generalizes zero-shot to a wide range of novel object categories and environments. In addition, we show how MOO generalizes to other, non-language-based input modalities to specify the object of interest such as finger pointing, and how it can be further extended to enable open-world navigation and manipulation. The project's website and evaluation videos can be found at https://robot-moo.github.io/